一种可提升行驶安全性的多轴线控底盘及其协调控制方法
本发明涉及多轴车辆底盘设计,尤其是一种可提升行驶安全性的多轴线控底盘及其协调控制方法。
背景技术:
1、多轴车辆作为核心工程装备,在交通运输、军事运载和建筑工程等方面发挥着重要作用,并朝着电动化、智能化方向发展。高性能多轴底盘和转向驱动协调控制技术可显著提升多轴车辆的低速行驶机动灵活性和高速行驶的操纵稳定性。这已成为衡量多轴车辆底盘发展水平的关键技术。
2、多轴车辆一般在矿山、港口和工程建设等恶劣的施工现场进行作业,且随着车身变长和承载重量增加,都会给多轴车辆带来低速灵活性差和转弯半径大等缺点。因此,对多轴车辆提出了高通过性、小转弯半径和高转向灵敏度的要求。但是传统多轴车辆转向系统常采用的转向梯形机构,其通过拟合一种纯滚动转向模式的左右轮转角关系确定转向梯形机构的参数,此方法下轮胎转角关系一般在零位附近满足要求。较大轮胎转角时无法满足纯滚动精确转向需求。易造成轮胎拖滑磨损,车辆轨迹跟踪能力变差。而且常采用的转向梯形机构是单自由度系统,仅能拟合一种转向模式,无法满足多轴车辆对多种转向模式的需求。
3、而在动力系统方面,传统多轴车辆发动机动力通过传动系统经差速器传输到轮胎,在转向行驶时差速不差矩。当车辆转向过程中出现过多不足转向和严重过度转向时无法通过改变驱动力矩大小调整多轴车辆的转向姿态。
4、为深入研究上述核心问题,通过精简可靠的实验底盘来模拟整车实验因契合实际效果,可以缩短研发周期而备受科研机构和企业的关注。如专利(202011277273.2)公开了一种电动汽车底盘,协调前轮横拉杆转向,中后轴线控转向可在一定程度上提高转向机动性。而在转向姿态控制上主要通过差动制动的方式给多轴车辆施加附加横摆力矩,提高车辆转向安全性(如专利201910884468.4)。
5、现有技术有助于在一定程度上提升多轴车辆转向机动性和转向安全性,但仍存在一些不足,主要表现如下:
6、1)传统多轴车辆底盘转向驱动结构复杂,传动效率相对较低,操作繁杂,增加驾驶员劳动强度,轮胎转角误差大,且因前轴仍采用传统横拉杆转向,故仍然无法满足多转向模式需求,同时大角度转向时仍无法满足纯滚动精确转向需求。轮胎容易出现边滚边滑的现象,多轴车辆轨迹跟踪精度相对较低,满足不了多轴车辆在狭小路况转向行驶。
7、2)当多轴车辆行驶在较小的附着系数路面时或者转向行驶时侧向加速度过大时,容易出现失稳安全问题,传统多轴底盘通过制动方式进行转向稳定性控制容易造成车速损失,平顺性相对较差,降低多轴车辆动力性能,造成动能大量损失。甚至有甩尾或者失去转向能力的风险,在复杂路况恶劣环境下不能完全发挥其动力性能。
8、3)传统多轴车辆主要通过pid进行纵向控制,当车辆受到横纵向干扰时,超调量增大,容易引起系统震荡,增加调节时间,特别是当车辆进入非线性状态时,控制系统鲁棒性不佳容易引起车辆失速、稳定性差等行驶安全问题。
技术实现思路
1、本发明提出一种可提升行驶安全性的多轴线控底盘及其协调控制方法,能实现6×2线控底盘的全轮独立转向,可以根据不同行驶工况切换转向模式,提高车辆转向机动性能和通过性。
2、本发明采用以下技术方案。
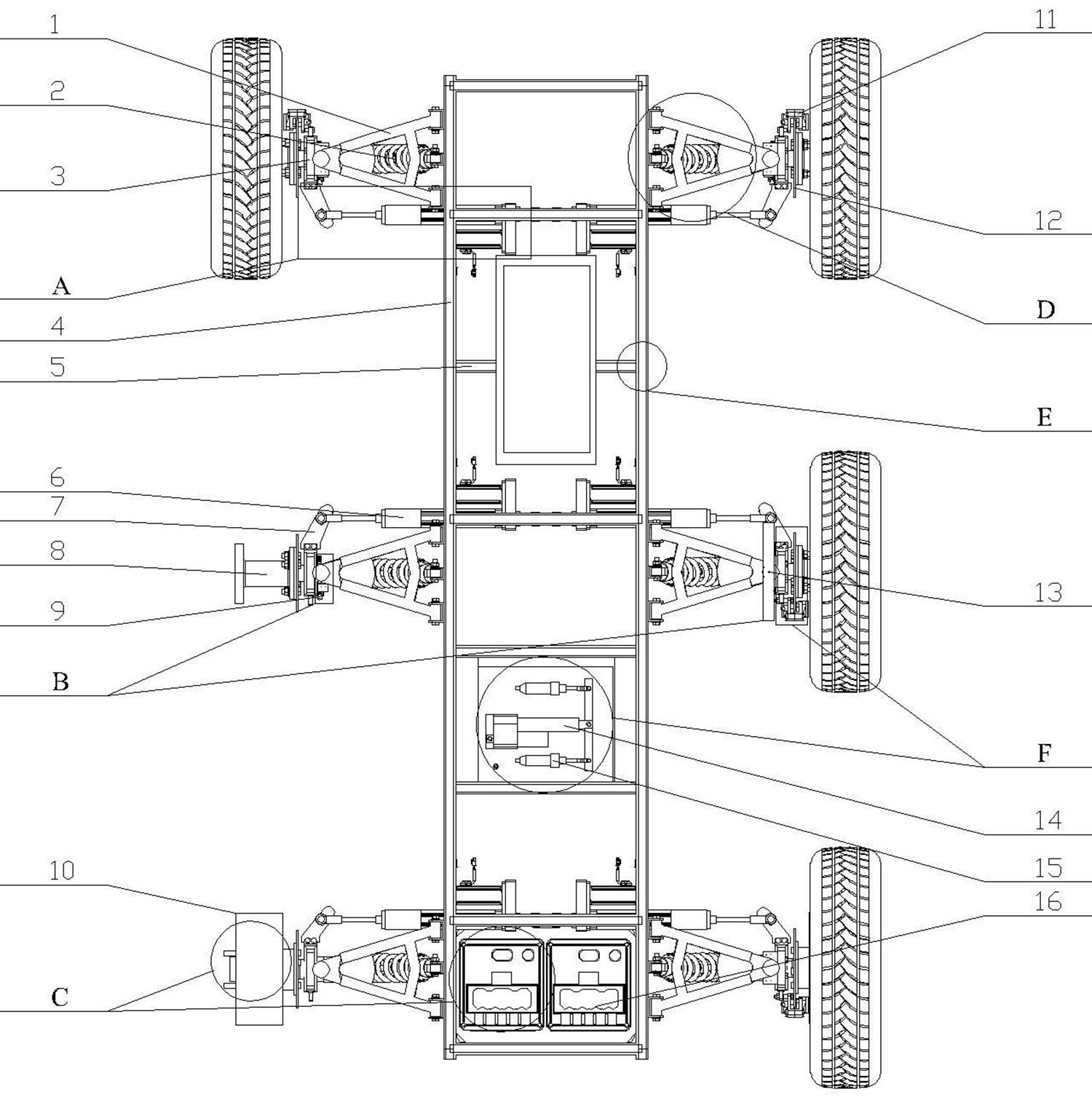
3、一种可提升行驶安全性的多轴线控底盘,为由轮毂电机驱动的6×2全轮转向线控底盘,其特征在于:包括车架(e)、悬架系统(d)、线控液压制动装置(f)、线控独立轮转向装置(a)和线控轮毂电机驱动装置(c)以及信号采集和无线遥控装置(b);
4、所述车架为由纵梁(4)、横梁(5)和垂直梁相连组成的长方体组合体,用于提供设备安装位置;
5、所述悬架系统由叉臂(1)、减震器和立柱组成,对称安装在多轴线控底盘的第一轴、第二轴和第三轴的车架(e)两侧及轮胎之间,用于传递轮胎和车架之间的力和力矩,缓冲因路面不平导致的冲击力;
6、所述线控液压制动装置,其由卡钳(11)、制动盘(12)、制动主缸(15)、遥控电动缸(14)和遥控设备组成,分别对称安装于驱动轮轮边系统和非驱动轮轮边系统中,通过远程遥控系统操作向轮胎提供制动力;
7、所述线控独立轮转向装置,其分别对称安装在第一轴、第二轴和第三轴车架和立柱(3)及转向摇臂(7)之间,用于精确独立控制每个轮胎转角;
8、所述线控轮毂电机驱动装置,其分别对称安装在第三轴轮胎的里面,用于驱动车辆行驶;
9、所述信号采集和无线遥控装置中,信号采集装置采集车辆行驶时整车转向姿态和行驶轨迹数据用于反馈控制;无线遥控装置,用于发送三轴车辆转向驱动行驶指令。
10、线控底盘行驶时,通过无线遥控装置发送控制指令以适应不同工况,在低速工况,线控独立轮转向装置根据线控底盘行驶的目标轨迹曲率和障碍物距离,采用多转向模式切换组合来维持安全高效转向行驶;在高速工况,通过信号采集装置采集的线控底盘工况数据输入到车辆状态判断模块,当线控底盘出现过多不足转向和严重转向过度时,线控轮毂电机控制装置通过增加附加横摆力矩调整线控底盘的转向姿态以提高行驶安全性。
11、所述线控独立轮转向装置通过电动伺服缸控制全轮转向,所述全轮转向为每个转向轮都通过一个单独的电动伺服缸来控制转向,该电动伺服缸的控制由电控单元根据整车控制器的转向模式和无线遥控设备来实现,通过不同转角组合形成不同的转向模式。其由转向摇臂(7)、电动伺服缸和伺服控制器组成,上层控制器通过can通讯发送报文给伺服控制器精准控制轮胎转角,线控独立轮转向装置的单侧结构包括:
12、转向摇臂,其一端固联在立柱上,另一端连接电动伺服缸;
13、电动伺服缸(6)为伺服电机与滚珠丝杠一体化集成结构,其将伺服电机的旋转运动转换为直线运动,其与所述转向摇臂相连接,另一端固定连接在车架上;伺服驱动器,通过can通讯接收来自整车控制器的转角信号,用于控制所述的电动伺服缸,精准独立控制轮胎转角;
14、当线控底盘转向行驶时,六个伺服控制器接收来自整车控制器的指令控制电动伺服缸,独立精确控制每个轮胎转角。在不同转向模式下,六个伺服控制器联动控制、快速切换,同时根据转角传感器反馈数据对转角进行闭环控制,保证转角精度,减少轮胎磨损。
15、所述线控轮毂电机驱动装置的单侧结构包括:
16、轮毂电机(10),其一端与轮胎通过轮毂螺栓连接,另一端通过楔键与立柱相连接;
17、轮毂电机控制器(16),通过紧固件安装在车架处,将车辆高压电池的两相电转换为轮毂电机需求的三相电,根据报文协议以can通讯建立与轮毂电机和整车控制器的信息交流;
18、两个轮毂电机控制器通过can通讯接收来自整车控制器的控制指令,根据车辆状态判断模块,调整不同的控制模式,实现全速范围内轮毂电机转速或转矩的精确控制,并反馈轮毂电机状态信息给整车控制器;
19、所述控制模式包括平均转矩模式控制和差异转矩模式控制,在平均转矩模式下通过电子差速器控制算法精准控制轮毂电机转速,实现差速不差矩;在差异转矩模式下,通过精准控制轮毂电机转矩达到期望值。
20、所述所述悬架系统由叉臂(1)、减震器(2)、吊耳和立柱(3)组成;所述叉臂包括上叉臂和下叉臂;
21、所述信号采集和无线遥控装置包括:
22、六个轮胎轮速传感器(9),其安装在立柱上,轮速传感器与安装在转动轴上的齿圈保持一定距离,通过霍尔效应产生电动势用于测量轮胎转速,将脉冲信号发送给整车控制器;
23、六个轮胎转角传感器,其分别对应安装于上叉臂处,通过弹性联轴器与立柱(3)连接,传感器主轴中心线和叉臂的主销重合,实时测量轮胎转角信号转化为电压模拟量发送给整车控制器;
24、陀螺仪,安装于车辆质心附近,用于测量三轴车辆的横摆角速度和横纵垂三个方向的加速度,通过can通讯将车辆状态信息发送给整车控制器;
25、组合惯导,包括xw-g15651mems配备mems陀螺和加速度计及测绘级多模多频gnss接收机;通过双天线辅助快速高精度定向,实时采集线控底盘运动轨迹信息,反馈到整车控制器,纠正线控底盘跑偏问题;
26、无线遥控装置,包括遥控手柄、无线发射设备、无线接收设备;遥控手柄操纵信号由无线发射设备向无线接收设备发送,无线接收设备通过can通讯将操纵信号发送给整车控制器,整车控制器根据接收信号调整线控底盘的控制模式;
27、无线遥控装置发送指令给整车控制器,整车控制器接收来自无线遥控装置和信号采集装置的信息,用于车辆状态判断模块和控制器的状态反馈需求,最终根据控制需求调整独立轮转向装置和轮毂电机驱动装置的控制模式。
28、可提升行驶安全性的多轴线控底盘的协调控制方法,采用以上所述的6×2全轮转向线控底盘,包括以下步骤;
29、步骤s1:通过无线遥控装置发送车速和转角信号到整车控制器;
30、步骤s2:整车控制器根据无线遥控装置指令和信号采集装置采集的信息对线控底盘进行转向驱动控制,在低速阶段,线控底盘的轮毂电机驱动装置采用平均转矩控制,独立轮转向装置根据转向模式切换模块改变各轮转角关系,实现高效高精度转向;
31、步骤s3:在高速阶段,根据传感器采集回来的轮胎转速信息估算线控底盘的实际纵向速度、并根据实际纵向速度、实际横摆角速度与理想横摆角速度偏差的绝对值输入到车辆状态监测模块,对转向和驱动控制模式进行切换。
32、在低速工况,所述转向模式切换模块根据线控底盘的目标行驶轨迹曲线曲率和障碍物距离进行转向模式切换;
33、轮毂电机采用平均转矩控制模式来驱动实现独立轮转向装置的四种转向模式:前两轴转向模式f4ws、三轴转向(6ws)、蟹行转向和原地转向模式切换组合,控制线控底盘进行转向行驶。
34、在高速工况,所述车辆状态监测模块根据输入的实际车速、横摆角速度偏差绝对值和横纵向加速度决定线控底盘转向驱动模式;
35、当线控底盘的纵向速度大于速度阈值,横摆角速度偏差绝对值小于横摆角速度偏差阈值时,轮毂电机采用差异转矩控制模式,独立轮转向系统可采用f4ws或者6ws转向模式;
36、当横摆角速度偏差绝对值大于横摆角速度偏差阈值时,轮毂电机采用差异转矩控制模式,独立轮转向系统采用f4ws转向模式;
37、同时车辆状态监测模块还要监测轮胎侧向力是否进入非线性区,当轮胎处于非线性区,此时轮毂电机控制模式切换至差异转矩模式。
38、所述的轮毂电机平均转矩控制模式扭矩通过pid控制器获得,差异转矩控制模式的扭矩通过模糊滑模控制器获得:
39、pid控制器输入量包括速度偏差,输出为三轴车辆轮胎总转矩;
40、模糊滑模控制器输入为横摆角速度和质心侧偏角偏差,通过滑模控制器输出附加横摆力矩;并引入模糊控制器将滑模控制器输出的非连续的信号模糊成连续的转矩信号,来柔化因多轴车辆负载多变、系统参数不确定性给转向驱动协调控制系统带来抖振问题。
41、所述模糊滑模控制器基于横摆角速度和质心侧偏角偏差设计的滑模面为:
42、s=(ωr-ωdes)+η(βr-βdes)公式一;
43、式中,ωr为实际线控底盘横摆角速度,ωdes为理想横摆角速度,βr为线控底盘实际质心侧偏角,βdes为理想质心侧偏角,η为联合控制参数;
44、结合三轴车辆二自由度汽车运动微分方程,并且采用鲁棒性更好的饱和函数等速趋近律,保证线控底盘转向驱动协调控制系统快速到达设计的滑模面,最后得到三轴车辆的附加横摆力矩控制率为:
45、
46、式中,iz为车辆转动惯量,k为滑模增益,sat(s/ε)是饱和函数;
47、所述控制方法选用模糊控制方法来减弱滑模控制出现的抖振,将滑模控制的非连续信号模糊成连续信号来柔化抖振问题,方法为:
48、模糊控制器选s、作为输入,u作为输出构建模糊控制器;对由横摆角速度ωr和质心侧偏角β构成的方程s进行模糊化,选定五个覆盖模糊论域[-2,2]的模糊子集{nb,ns,zo,ps,pb},隶属度函数选择高斯函数,并构建模糊控制规则表如下表2;
49、表2.模糊控制规则表
50、
51、三轴车辆模糊滑模控制器最终控制率附加横摆力矩输出以公式表述为:
52、
53、步骤s1具体方法为:其中驾驶员操纵无线遥控装置,刚启动时转向装置采用6ws转向模式,轮毂电机采用平均转矩控制模式;
54、步骤s2具体方法为:转角信号为第一轴左前轮转角,整车控制器根据接收的转角信号和车速信号,结合三轴车辆二自由度动力学方程计算车辆转向行驶时的期望横摆角速度和期望质心侧偏角;为提高车辆轨迹跟踪能力,理想质心侧偏角设置为零。
55、三轴车辆理想二自由度动力学方程如下:
56、
57、式中,c1,c2,c3分别为三轴车辆第一轴、第二轴和第三轴轮胎侧偏刚度,a,b,c分别是三轴车辆质心到第一、第二和第三轴的距离,β,ωr分别为质心侧偏角和横摆角速度,m为三轴车辆的质量,u,δ1为车辆速度和第一轴车轮转角,iz为车辆转动惯量;
58、三轴车辆理想横摆角速度:
59、
60、式中,l为第一轴到第三轴的距离;
61、整车控制器根据接收的车速信号,设计pid车速控制器计算三轴车辆轮毂电机驱动总转矩;
62、
63、式中,tpid是三轴车辆车速控制模块输出总转矩,ev是实际车速和理想车速的偏差值,kp,ki,kd分别是比例、积分和微分系数;
64、步骤s3具体方法为:根据传感器采集回来的轮胎转速信息估算实际纵向速度、并根据实际纵向速度、实际横摆角速度与理想横摆角速度差的绝对值输入到转角控制模块和轮毂电机控制模块中。同时根据陀螺仪采集回来的三轴车辆侧向加速度信息判断轮胎是否进入非线性区,当侧向加速度大于0.4g时,车辆失稳风险增加,轮毂电机需要切换到差异转矩控制模式为车辆提供附加横摆力矩,提高车辆转向稳定性;具体模式切换规则表如下表1所示
65、表1.转向模式和轮毂电机控制模式切换规则表
66、
67、当车辆处于中性转向工况时,轮毂电机转矩平均分配,值为:
68、t3l=t3r=tpid/2 公式七;
69、式中,t3l为第三轴左边轮毂电机转矩,t3r为第三轴右边轮毂电机转矩;
70、当车辆处于过多不足转向时,车辆行驶轨迹朝外偏离理想轨迹,此时需要通过控制轮毂电机转矩给三轴车辆施加一个附加的逆时针横摆力矩,使得车辆的横摆角速度和质心侧偏角处于合理范围之内;
71、当车辆处于严重过度转向时,车辆行驶轨迹朝内偏离理想轨迹,此时需要通过控制轮毂电机转矩给三轴车辆施加一个附加的顺时针横摆力矩,使得车辆的横摆角速度和质心侧偏角处于合理范围之内;转向行驶轨迹跟上理想轨迹;
72、附加横摆力矩的计算主要根据多轴车辆实际和理想的横摆角速度和质心侧偏角的误差通过模糊滑模控制器计算得到,设计过程如下:
73、设计的滑模面为:
74、s=(ωr-ωdes)+η(βr-βdes)公式八;
75、式中,ωr为实际线控底盘横摆角速度,ωdes为理想横摆角速度,βr为线控底盘实际质心侧偏角,βdes为理想质心侧偏角,η为联合控制参数;
76、可达条件:
77、
78、式中,k为滑模增益;
79、结合步骤s2中三轴车辆二自由度汽车运动微分方程可得:
80、
81、为了使三轴车辆控制系统快速到达设计的滑模面,选等速趋近律并采用鲁棒性更好的饱和函数:
82、u=-k*sat(s)公式十一;
83、其中,所以最后三轴车辆的附加横摆力矩控制率为:
84、
85、式中,iz为车辆转动惯量,k为滑模增益,sat(s/ε)是饱和函数;
86、当轮毂电机进行差异转矩控制模式时,第三轴两边轮毂电机附加转矩一正一负,大小相等,正负和大小通过车辆转向方向和转向状态来确定,转向方向即左转或右转,转向状态即过度转向或不足转向,保证不对线控底盘车速影响太大,即附加横摆力矩不改变总的纵向力矩。最终轮毂电机驱动转矩由pid控制转矩和模糊滑模控制转矩相加得到,如下表3所示
87、表3.附加横摆力矩分配表
88、
89、本发明设计开发了一种由轮毂电机驱动的多轴电动化线控底盘,该线控底盘有轮毂电机驱动装置和独立轮转向装置。轮毂电机驱动装置由第三轴的轮毂电机驱动轮胎,可以根据车辆转向姿态调整轮毂电机控制模式,提高多轴车辆的转向安全性。独立轮转向装置通过6个电动缸分别带动三轴底盘的车轮转向,实现62线控底盘的全轮独立转向,可以根据不同行驶工况切换转向模式,提高车辆转向机动性能和通过性;并且,匹配于上述结构,同时设计开发了一种可提升行驶安全性的多轴线控底盘协调控制方法;在低速阶段,线控独立轮转向装置可以根据线控底盘行驶的目标轨迹曲率和障碍物距离采用多转向模式切换组合安全高效转向行驶,线控轮毂电机控制装置采用平均转矩控制,避免频繁切换增加能耗。在高速阶段,通过信号采集装置采集的数据输入到车辆状态判断模块,当线控底盘出现过多不足转向和严重转向过度时,线控轮毂电机控制装置通过增加附加横摆力矩调整线控底盘的转向姿态并提高行驶安全性。
90、与现有技术相比,本发明具有以下有益效果:
91、1)本发明提供的由轮毂电机驱动的6×2全轮独立转向线控底盘,应用智能的无线遥控和精简的线控电动化转向驱动装置相结合,依靠自动化程序进行模式切换和转向姿态调整,提升了多轴线控底盘的智能化和电动化水平。其中,采用独立轮转向装置,能够提供多种转向模式,使车辆具备更小的转弯半径,可满足多轴车辆在狭窄空间中通过不同转向模式的切换安全高效通行,提高了多轴车辆的转向机动性和高通过性。同时依靠高精度电动伺服缸精准独立控制每个轮胎转角,可以减小因转向误差导致的轮胎磨损。轮毂电机驱动装置与传统多轴车辆动力系统相比,具有结构简单、响应速度快、控制精度高,转速和扭矩可以灵活分配,能效高等优点,有利于发挥多轴车辆驱动潜能。
92、2)本发明提供的一种可提升转向安全性的多轴线控底盘及其协调控制方法,依靠设计的独立轮转向系统和轮毂电机系统,通过不同转向模式切换提高多轴车辆机动性能。轮毂电机在一般工况使用平均转矩控制,避免频繁调整转矩带来的能耗,而在危险工况下,通过车辆状态监测模块识别,调整轮毂电机为差异转矩控制模式调整多轴车辆转向姿态;两套系统协同控制,根据车辆状态调整转向驱动模式,保证多轴车辆在复杂路况恶劣环境下依然有高轨迹跟踪能力和良好的转向安全性。
93、3)本发明解决了多轴线控底盘在低附着系数路面、高速状态下以及轮胎处于非线性区的转向失稳问题,通过设计的高鲁棒性的模糊滑模器进行横纵向控制,用于抵抗外界干扰影响并且减弱滑模控制的抖振问题。在维持多轴线控底盘纵向速度稳定的情况下,增加附加横摆力矩来调整转向姿态,提高多轴线控底盘的转向安全性。
- 还没有人留言评论。精彩留言会获得点赞!