一种基于IEAP柔性驱动器的爬杆软体机器人
本发明涉及一种柔性软体机器人,尤其是一种基于ieap柔性驱动器的爬杆软体机器人。
背景技术:
1、最近几年,随着材料科学的不断发展,基于柔性可驱动材料的软体可变形机器人逐渐成为研究热点。传统的刚性机器人由于刚性结构导致运动形式单一、灵活性差等缺点,无法适应复杂、狭窄的工作环境。为了解决这些问题,研究人员基于柔性可驱动材料,通过模仿自然界中的软体动物,研制出各种仿生软体机器人,和传统刚性机器人相比,软体机器人对复杂环境的适应能力大大增强,在柔性电子设备、柔性传感设备、生物医疗设备、仿生机器人等领域具有广阔的应用前景。柔性可驱动材料对软体机器人的运动至关重要,目前常用的软体可驱动材料有形状记忆合金/聚合物、压电聚合物、电活性聚合物(electroactive polymers,eap)等。其中,压电聚合物所需驱动电压过高,难以推广;形状记忆合金/聚合物所需驱动温度较高,变形缓慢,不适合软体机器人的构建。而通过eap材料,可以解决这些材料带来的问题。
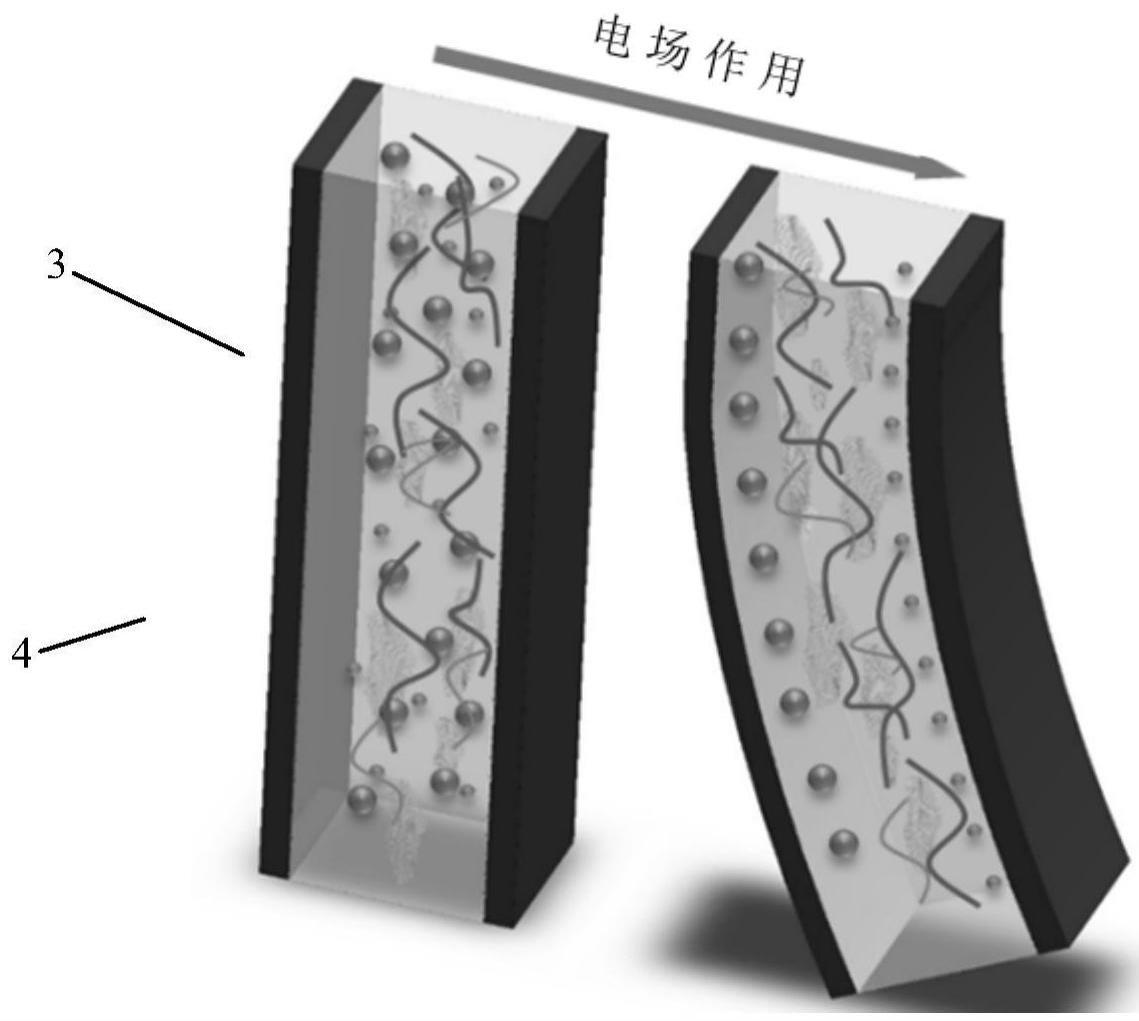
2、离子型电活性驱动器(ionic electroactive polymers,ieap)作为eap的一种,其质量轻、环境适应性好、驱动电压低(0.5-3v)、响应速度快、变形大,在柔性电子设备、柔性传感器、柔性医疗设备以及仿生软体机器人等多个领域展现了巨大的应用前景。ieap由中间的离子聚合物层和两侧的电极层组成,在外加电场的作用下,离子聚合物层中的阳离子沿着离子通道定向移动至阴极并不断累积,由于阴阳离子的体积差异导致阳极的收缩和阴极的膨胀,宏观上表现为弯曲变形。如今,已经实现了基于ieap的柔性抓手、柔性手指、仿生花瓣等应用。事实证明,ieap非常适合作为仿生软体机器人的驱动材料实现更多的仿生应用。
技术实现思路
1、本发明的目的是克服上述背景技术中的不足,提供一种基于ieap柔性驱动器的爬杆软体机器人,以通过蠕动方式在杆状物体上运动。
2、本发明的技术方案是:
3、一种基于ieap柔性驱动器的爬杆软体机器人,包括ieap驱动控制器;其特征在于:该机器人还包括条形的主体驱动器以及连接在主体驱动器两端的螺旋形足部驱动器;所述主体驱动器与足部驱动器均采用ieap材料制成;所述主体驱动器与足部驱动器均通过导线电连接ieap驱动控制器。
4、所述两个足部驱动器的中轴线共线。
5、所述主体驱动器的端部通过胶水与足部驱动器固定。
6、所述ieap驱动器包括离子聚合物膜以及设置在离子聚合物膜两侧的柔性电极。
7、所述主体驱动器的中部电连接导线,足部驱动器的端部电连接导线。
8、本发明的工作原理是:
9、该机器人的运动方式为仿蠕虫的运动,即“收缩-固着-伸长”的运动方式;通过中间的主体驱动器的弯曲变形实现“收缩”与“伸长”运动;通过足部驱动器缩放时与杆的摩擦力实现“固着”运动;通过控制各个驱动器的通断电顺序及时长来实现整体运动。
10、本发明的有益效果是:
11、本发明采用的ieap驱动器以纤维素为基底,绿色环保、成本低廉且性能优异;主体驱动器采用条形结构,将ieap驱动器的偏摆转化为轴向弯曲变形,实现整体的蠕动动作;足部驱动器采用螺旋形结构,将ieap驱动器的偏摆转化为轴向伸缩与径向伸缩的螺旋变形,实现了驱动器的抓取与释放动作;将弯曲变形与螺旋变形两种运动形式结合在一起,通过控制驱动器通断电的顺序实现仿蠕虫的“收缩-固着-伸长”运动;同时,该发明结构简单、组装方便、体积小巧,为ieap应用于软体仿生机器人等应用提供一定的借鉴意义。
技术特征:
1.一种基于ieap柔性驱动器的爬杆软体机器人,包括ieap驱动控制器;其特征在于:该机器人还包括条形的主体驱动器(1)以及连接在主体驱动器两端的螺旋形足部驱动器(2);所述主体驱动器与足部驱动器均采用ieap材料制成;所述主体驱动器与足部驱动器均通过导线电连接ieap驱动控制器。
2.根据权利要求1所述的一种基于ieap柔性驱动器的爬杆软体机器人,其特征在于:所述两个足部驱动器的中轴线共线。
3.根据权利要求2所述的一种基于ieap柔性驱动器的爬杆软体机器人,其特征在于:所述主体驱动器的端部通过胶水与足部驱动器固定。
4.根据权利要求3所述的一种基于ieap柔性驱动器的爬杆软体机器人,其特征在于:所述ieap驱动器包括离子聚合物膜(3)以及设置在离子聚合物膜两侧的柔性电极(4)。
5.根据权利要求4所述的一种基于ieap柔性驱动器的爬杆软体机器人,其特征在于:所述主体驱动器的中部电连接导线,足部驱动器的端部电连接导线。
技术总结
本发明涉及一种柔性软体机器人。目的是一种基于IEAP柔性驱动器的爬杆软体机器人,以通过蠕动方式在杆状物体上运动。技术方案是:一种基于IEAP柔性驱动器的爬杆软体机器人,包括IEAP驱动控制器;其特征在于:该机器人还包括条形的主体驱动器以及连接在主体驱动器两端的螺旋形足部驱动器;所述主体驱动器与足部驱动器均采用IEAP材料制成;所述主体驱动器与足部驱动器均通过导线电连接IEAP驱动控制器。
技术研发人员:王帆,许观政
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!