转向器的转角处理方法和车辆与流程
本发明涉及车辆领域,具体而言,涉及一种转向器的转角处理方法和车辆。
背景技术:
1、目前市场上的汽车产检基本均已搭载车动助力转向器,在整车的安装过程中,需要保证电动助力转向器的齿条位置居中,以及在车辆进行四轮定位时,确认电动助力转向器的转向角度符合设计状态,才可以确保车辆在进行转弯时,左侧和右侧的转弯半径相同。
2、由于市场上各厂商的整车安装水平不一致,很难保证电动助力转向器的转向器齿条处于中间位置,导致车辆转弯进行左侧或右侧转弯时,转弯半径不同,以及随着车辆使用里程的增加,车辆的底盘件磨损增加、紧固件力矩衰退等原因,车辆的四轮定位参数与初始值也会出现变差,导致转向器齿条的位置进行变动,车辆在进行转弯操作会出现偏差,进而导致车辆出现跑偏和轮胎异常磨损等问题。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种转向器的转角处理方法和车辆,以至少解决电动助力转向器出现偏差,造成的车辆转弯操作出现偏差的技术问题。
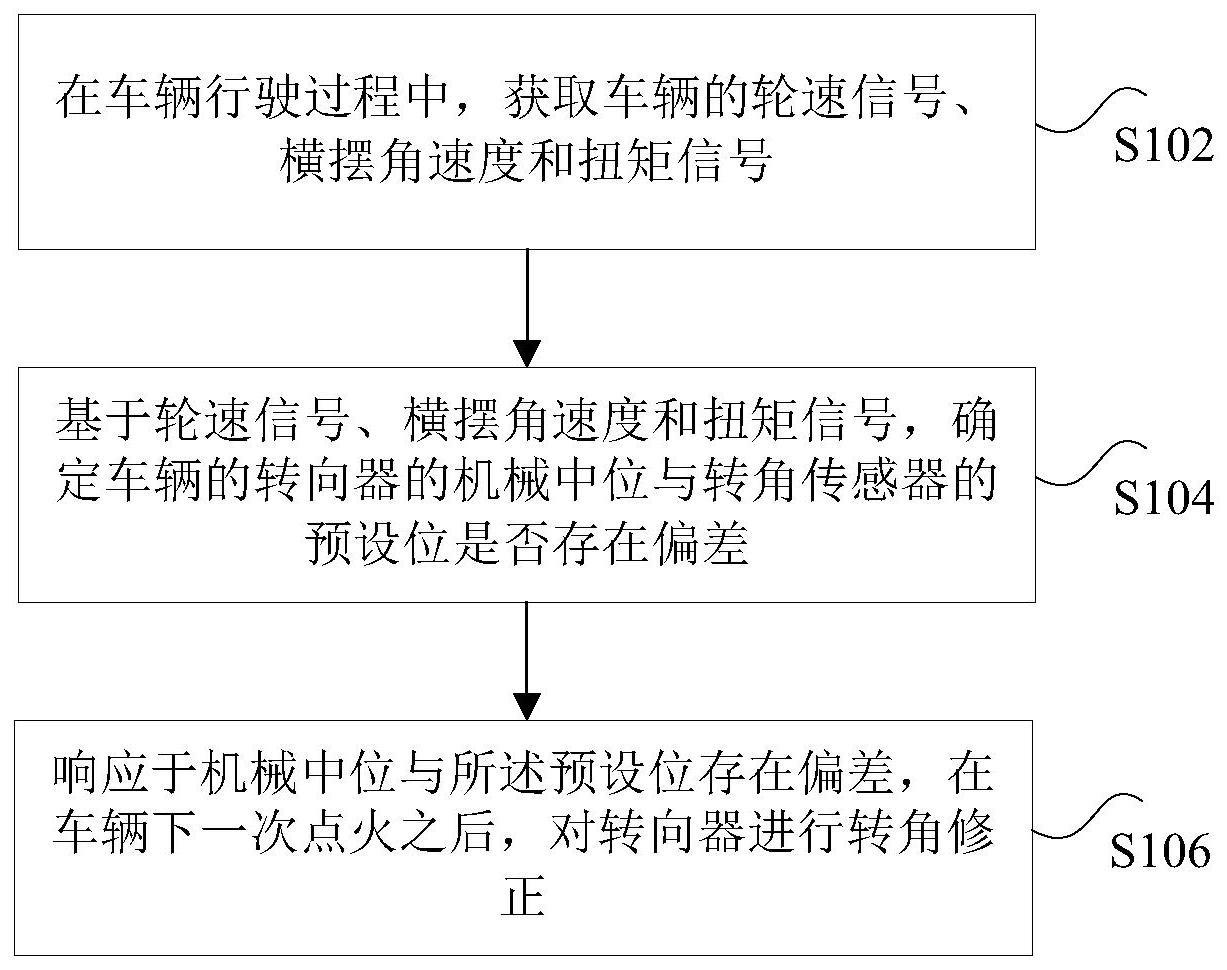
2、根据本发明实施例的一个方面,提供了一种转向器的转角处理方法,包括:在车辆行驶过程中,获取车辆的轮速信号、横摆角速度和扭矩信号;基于轮速信号、横摆角速度和扭矩信号,确定车辆的转向器的机械中位与转角传感器的预设位是否存在偏差;响应于机械中位与预设位存在偏差,在车辆下一次点火之后,对转向器进行转角修正。
3、可选地,基于轮速信号、横摆角速度和扭矩信号,确定车辆的转向器的机械中位与转角传感器的预设位是否存在偏差,包括:基于轮速信号和横摆角速度,确定车辆是否处于直行状态;响应于车辆处于直行状态,基于扭矩信号,确定机械中位与预设位是否存在偏差。
4、可选的,基于轮速信号和横摆角速度,确定车辆是否处于直行状态,包括:响应于轮速信号小于第一阈值,且横摆角速度小于第二阈值,确定车辆处于直行状态;响应于轮速信号大于或等于第一阈值,或横摆角速度大于或等于第二阈值,确定车辆未处于直行状态。
5、可选地,基于扭矩信号,确定机械中位与预设位是否存在偏差,包括:响应于扭矩信号小于第三阈值,确定机械中位与预设位不存在偏差;响应于扭矩信号大于或等于第三阈值,确定机械中位与预设位存在偏差。
6、可选地,在车辆下一次点火之后,对转向器进行转角修正,包括:获取转向器的历史转角平均值;基于历史转角平均值确定是否对转向器进行转角修正;响应于确定对转向器进行转角修正,获取车辆的第一转角信号;基于第一转角信号和历史转角平均值,对转向器进行转角修正。
7、可选地,基于历史转角平均值确定是否对转向器进行转角修正,包括:响应于历史转角平均值大于第四阈值,确定对转向器进行转角修正;响应于历史转角平均值小于或等于第四阈值,确定不对转向器进行转角修正。
8、可选地,基于第一转角信号和历史转角平均值,对转向器进行转角修正,包括:对第一转角信号和历史转角信号进行叠加运算,得到角度修正值;基于角度修正值对转向器进行转角修正。
9、可选地,该方法还包括:响应于确定对转向器进行转角修正,输出第一提示信息,其中,第一提示信息用于提示将车辆的转向盘转动到预设位置;响应于对转向器进行转角修正完成,输出第二提示信息,其中,第二提示信息用于提示转向器的转角修正完成。
10、可选地,响应于机械中位与预设位存在偏差,该方法还包括:确定车辆处于直行状态的第一持续时间;响应于第一持续时间大于第一预设时间,获取第一持续时间内转向器的多个转角;获取多个转角的平均值,得到历史转角平均值。
11、可选地,在获取多个转角的平均值,得到历史转角平均值之后,该方法还包括:将接收到的转角信号和转角平均值进行运算,得到目标转角;基于目标转角对转向器进行控制。
12、可选地,在第一次对转向器进行转角标定的过程中,该方法还包括:响应于接收到转角标定设备发送的转角标定请求,控制转向器转向,确定转向器是否到达机械中位;响应于确定转向器到达机械中位,获取转角传感器采集到的转角位置;确定转角位置为预设位。
13、可选地,控制转向器转向,确定转向器是否到达机械中位,包括:控制转向器按照第一方向转向,确定转向器的第一转向时间,其中,第一转向时间用于表征从转向器开始转向,至转向器的第一扭矩值达到第一预设扭矩值的时间;控制转向器按照第二方向转向,确定转向器的第二转向时间,其中,第二转向时间用于表征从转向器开始转向,至转向器的第二扭矩值达到第二预设扭矩值的时间;基于第一转向时间和第二转向时间,确定第三转向时间;响应于转向器按照第一方向的第三转向时间到达目标转向时间,确定转向器到达机械中位。
14、根据本发明实施例的另一方面,还提供了一种转向器的转角处理装置,包括:获取模块,用于在车辆行驶过程中,获取车辆的轮速信号、横摆角速度和扭矩信号;偏差确定模块,用于基于轮速信号、横摆角速度和扭矩信号,确定车辆的转向器的机械中位与转角传感器的预设位是否存在偏差;修正模块,用于响应于机械中位与预设位存在偏差,在车辆下一次点火之后,对转向器进行转角修正。
15、可选地,偏差确定模块包括:直行状态确认单元,用于基于轮速信号和横摆角速度,确定车辆是否处于直行状态;偏差确认单元,用于响应于车辆处于直行状态,基于扭矩信号,确定机械中位与预设位是否存在偏差。
16、可选地,直行状态确认单元还用于响应于轮速信号小于第一阈值,且横摆角速度小于第二阈值,确定车辆处于直行状态;响应于轮速信号大于或等于第一阈值,或横摆角速度大于或等于第二阈值,确定车辆未处于直行状态。
17、可选地,偏差确认单元还用于响应于扭矩信号小于第三阈值,确定机械中位与预设位不存在偏差;响应于扭矩信号大于或等于第三阈值,确定机械中位与预设位存在偏差。
18、可选地,修正模块包括:平均值获取单元,用于获取转向器的历史转角平均值;确定单元,用于基于历史转角平均值确定是否对转向器进行转角修正;响应单元,用于响应于确定对转向器进行转角修正,获取车辆的第一转角信号;转角修正单元,用于基于第一转角信号和历史转角平均值,对转向器进行转角修正。
19、可选地,确定单元还用于响应于历史转角平均值大于第四阈值,确定对转向器进行转角修正;响应于历史转角平均值小于或等于第四阈值,确定不对转向器进行转角修正。
20、可选地,转角修正单元还用于对第一转角信号和历史转角信号进行叠加运算,得到角度修正值;基于角度修正值对转向器进行转角修正。
21、可选地,该装置还包括:第一输出模块,用于响应于确定对转向器进行转角修正,输出第一提示信息,其中,第一提示信息用于提示将车辆的转向盘转动到预设位置;第二输出模块,用于响应于对转向器进行转角修正完成,输出第二提示信息,其中,第二提示信息用于提示转向器的转角修正完成。
22、可选地,该装置还包括:时间确定模块,用于响应于机械中位与预设位存在偏差,确定车辆处于直行状态的第一持续时间;转角获取模块,用于响应于第一持续时间大于第一预设时间,获取第一持续时间内转向器的多个转角;平均值确定模块,用于获取多个转角的平均值,得到历史转角平均值。
23、可选地,该装置还包括:运算模块,用于在获取多个转角的平均值,得到历史转角平均值之后,将接收到的转角信号和转角平均值进行运算,得到目标转角;控制模块,用于基于目标转角对转向器进行控制。
24、可选地,该装置还包括:转向器状态确定模块,用于响应于接收到转角标定设备发送的转角标定请求,控制转向器转向,确定转向器是否到达机械中位;转角位置获取模块,用于响应于确定转向器到达机械中位,获取转角传感器采集到的转角位置;预设位确定模块,用于确定转角位置为预设位。
25、可选地,转向器状态确定模块包括:第一转向时间确定单元,用于控制转向器按照第一方向转向,确定转向器的第一转向时间,其中,第一转向时间用于表征从转向器开始转向,至转向器的第一扭矩值达到第一预设扭矩值的时间;第二转向时间确定单元,用于控制转向器按照第二方向转向,确定转向器的第二转向时间,其中,第二转向时间用于表征从转向器开始转向,至转向器的第二扭矩值达到第二预设扭矩值的时间;第三转向时间确定单元,用于基于第一转向时间和第二转向时间,确定第三转向时间;机械中位确定单元,用于响应于转向器按照第一方向的第三转向时间到达目标转向时间,确定转向器到达机械中位。
26、根据本发明实施例的另一方面,还提供了一种非易失性存储介质,非易失性存储介质包括存储的程度,其中,在程序运行时控制所在设备的处理器执行本技术实施例中任意一项转向器的转角处理方法。
27、根据本发明实施例的另一方面,还提供了一种车辆,包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当一个或多个程序被执行一个或多个处理器执行,使得一个或多个处理器执行本技术实施例中任意一项转向器的转角处理方法。
28、在本发明实施例中,在车辆的行驶过程中,获取车辆的轮速信号、横摆角速度和扭矩信号后,可以进一步基于轮速信号、横摆角速度和扭矩信号,确定车辆的转向器的机械中位与转角传感器的预设位是否存在偏差,在机械中位与预设位存在偏差的情况下,在车辆下一次点火之后,对转向器进行转角修正,从而可以使得转向器的位置保持不变,避免车载在转弯操作过程中出现偏差,达到提高车辆在转向过程中方向盘转向与车辆轮胎转向之间的匹配度的技术效果,进而解决了电动助力转向器出现偏差,造成的车辆转弯操作出现偏差的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!