一种六相永磁同步电机线控转向系统路感鲁棒控制方法
本发明属于车辆线控转向控制领域,具体涉及一种六相永磁同步电机线控转向系统路感鲁棒控制方法。
背景技术:
1、线控转向(sbw)路感系统在全状态(健康/故障)的安全性与鲁棒性一直备受关注,六相永磁同步电机因为冗余的绕组解决了安全性的问题。当六相永磁同步电机发生故障时,除了外部负载扰动、内部参数失配、逆变器非线性、交叉耦合电压和高次电流谐波,不可避免地存在剧烈的周期性转矩脉动,严重影响性能。
2、传统鲁棒方案如电流谐波抑制、转矩鲁棒控制、电流鲁棒控制、外部扰动与参数失配抑制和容错控制等,都是针对特定状态的独立的解决方案,无法在包含健康与故障的全状态下发挥最佳性能。六相永磁同步电机绕组短路或断路时会出现周期性转矩脉动。转矩控制模块应具有对其抑制的能力,相较于滑模控制、h∞控制和模型预测控制等方法,学习和重复控制是更适合的方案。但重复控制对非周期性扰动分量无能为力,其性能过于依赖系统惯性响应。目标路感转矩的稳定跟踪依赖于双三相永磁同步电机良好的电流控制。由于微型处理器的快速发展,模型预测电流控制因为原理简单、物理概念清晰等优点脱颖而出,但其过度依赖模型,而无模型电流预测控制算法避免了缺陷。
技术实现思路
1、针对于上述现有技术的不足,本发明的目的在于提供一种六相永磁同步电机线控转向系统路感鲁棒控制方法,以解决现有技术中线控转向路感系统在不同状态下受到外部负载扰动、内部参数失配、逆变器非线性、交叉耦合电压和高次电流谐波影响而转矩输出不稳定的问题。
2、为达到上述目的,本发明采用的技术方案如下:
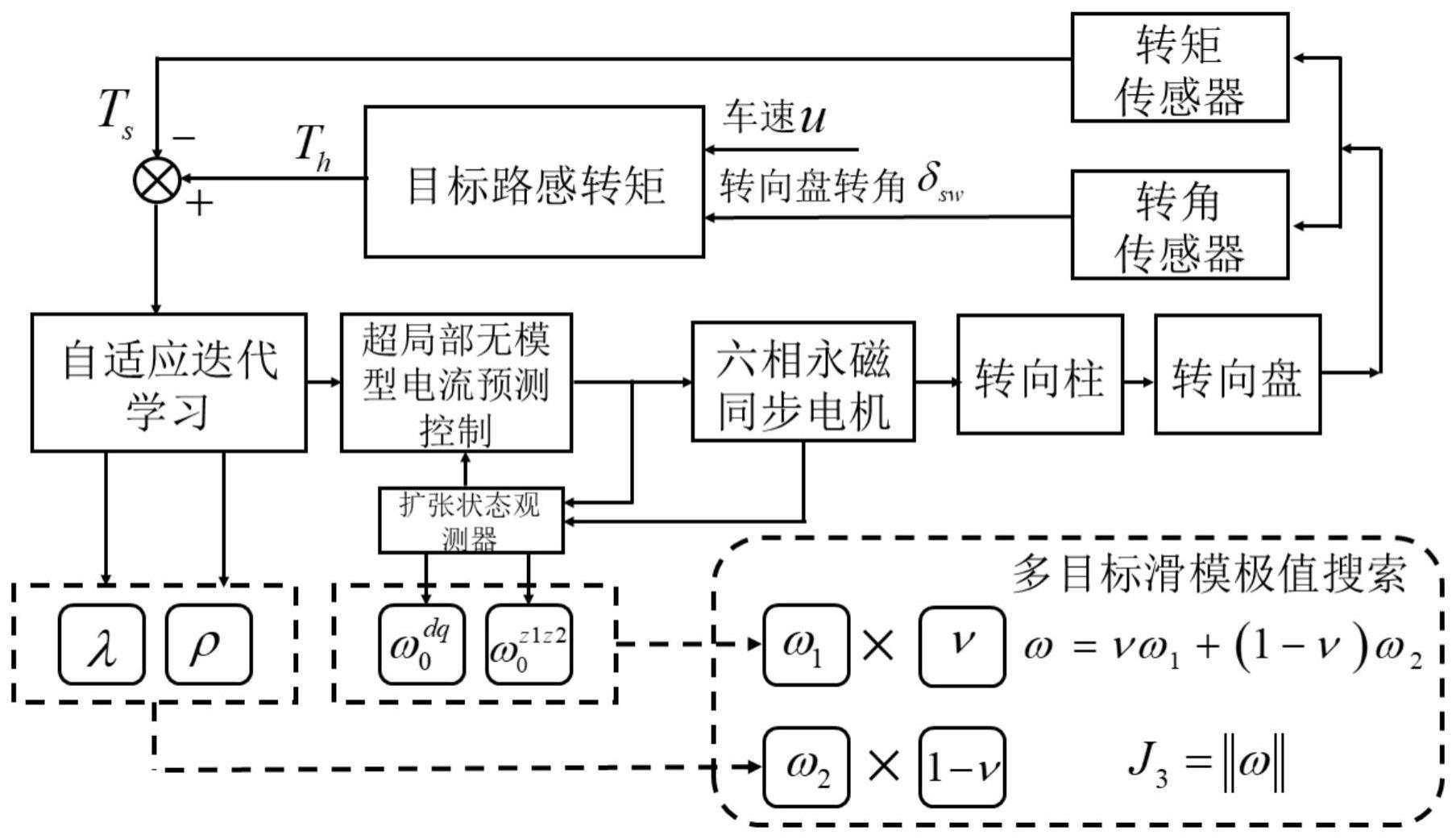
3、本发明的一种六相永磁同步电机线控转向系统路感鲁棒控制方法,基于线控转向路感系统,所述线控转向路感系统包括:六相永磁同步电机、转向柱、转向盘、转角传感器、转矩传感器、路感控制器、车速传感器及电流传感器;
4、所述六相永磁同步电机与车辆底盘机械连接,六相永磁同步电机的输出轴与所述转向柱机械连接;所述转角传感器与所述转矩传感器分别安装在六相永磁同步电机的输出轴上,转角传感器采集六相永磁同步电机的输出轴转角,转矩传感器采集六相永磁同步电机的输出轴转矩,所述转角传感器、转矩传感器均与所述路感控制器电性连接,并将转角信号、转矩信号通过信号线发送至路感控制器;路感控制器与六相永磁同步电机电性连接,路感控制器输出六相电压信号并通过信号线发送至六相永磁同步电机;六相永磁同步电机产生转矩并带动转向柱与转向盘,为驾驶员提供路感转矩;所述转向盘安装在转向柱一端;所述电流传感器与路感控制器电性连接,电流传感器采集六相永磁同步电机电流并通过信号线传输至路感控制器;所述车速传感器采集车辆行驶速度;步骤如下:
5、1)将车速传感器采集到的车速信号、转角传感器采集到的六相永磁同步电机的转角信号传输至路感控制器,计算得到目标路感转矩;
6、2)转矩传感器采集六相永磁同步电机输出轴的实际转矩,将上述目标路感转矩与实际转矩作差,得到差值;
7、3)将上述步骤2)中的差值输入至路感控制器,通过自适应遗忘因子迭代学习算法计算得到六相永磁同步电机的q轴目标电流
8、4)建立六相永磁同步电机的电流环的扩张状态观测器的状态方程,并进行离散化,以电流与电流环未知非线性扰动作为状态变量,通过扩张状态观测器计算得到d轴、q轴、z1轴和z2轴的电流环未知非线性扰动;
9、5)设计超局部无模型电流预测控制算法,并进行离散化与差拍延时处理,将六相永磁同步电机q轴目标电流输入至超局部无模型电流预测控制算法,将d轴电流的目标值设置为0,z1轴和z2轴电流的目标值和设置为0,将d轴、q轴、z1轴和z2轴电流的目标值与电流环未知非线性扰动输入超局部无模型电流预测控制算法中,调制得到六相永磁同步电机的六相参考电压;
10、6)将六相参考电压输入至六相永磁同步电机,六相永磁同步电机产生转矩,并通过转向柱传递至转向盘并进一步驱动转向盘,为驾驶员提供路感转矩。
11、进一步地,所述六相永磁同步电机与车辆底盘通过螺栓螺母机械连接。
12、进一步地,所述步骤1)具体包括:
13、将车速传感器和转角传感器采集到的车速信号、六相永磁同步电机的转角信号作为路感控制器的输入,通过计算得到目标路感转矩;
14、目标路感转矩包括自对准转矩mz,自对准转矩引起的转向盘转矩tz表示为:
15、
16、式中,e(v)为速度系数;mzmax为侧向加速度大于/等于4m/s2时的前轮的自对准转矩;ay为车辆侧向加速度;g为自对准系数;
17、自对准转矩mz由二自由度车辆模型得到:
18、
19、式中,m为车辆质量;u为车辆纵向速度;a为车辆前轴到车辆质心的距离;b为车辆后轴到车辆质心的距离;cf为前轮侧偏刚度;cr为后轮侧偏刚度;q为前轮负荷;d为轮胎侧倾偏移量;β′为主轴倾角;l为轴距,l=a+b;δf为车辆前轮转角;
20、路感转矩的阻尼控制表示为与转向盘角速度成正比,表示为:
21、
22、式中,cdamp为阻尼系数,tdamp为含阻尼控制的路感转矩;为转向盘转角的一阶时间导数;
23、目标路感转矩th表示为:
24、
25、进一步地,所述步骤2)具体包括:
26、转矩传感器采集六相永磁同步电机输出轴的实际转矩,将上述目标路感转矩与实际转矩作差,得到目标路感转矩与六相永磁同步电机输出轴的实际转矩的差值et:
27、et=th-ts
28、式中,th为目标路感转矩;ts为实际路感转矩。
29、进一步地,所述步骤3)具体包括:
30、自适应遗忘因子迭代学习算法的学习律表示为:
31、
32、式中,k为迭代次数;λ为遗忘因子,λ∈[0,1];ρ为控制增益;l为学习增益矩阵;为q轴参考电流。
33、进一步地,所述步骤4)具体包括:
34、以电流x1与电流环未知非线性扰动x2作为状态变量,扩张状态观测器的状态方程为:
35、
36、式中,z1为电流观测值;z2为扰动观测值;x1为电流;x2为非线性扰动;ηi1和ηi2为观测器参数,i为1、2、3和4,1代表d轴,2代表q轴,3代表z1轴,4代表z2轴;α为电流系数;β为电压系数;u为控制输入;e为观测值与实际值的误差;
37、扩张状态观测器的特征方程为:
38、
39、式中,a、k和c为特征方程的参数;s为微分算子;i为单位矩阵;ηi1和ηi2为观测器离散增益,ω0为带宽;
40、采用前向欧拉离散法,对扩张状态观测器的状态方程进行离散化,得到离散化后的状态方程为:
41、
42、式中,e(k)为第k时刻电流观测值z1(k)和电流实际值x1(k)的差值;z1(k+1)为第k+1时刻电流观测值;t为采样周期;z2(k)为第k时刻电流环扰动观测值;u(k)为第k时刻控制输入;z2(k+1)为第k+1时刻电流环扰动观测值;ηi1和ηi2为观测器离散增益;
43、通过最小化电流实际值与电流观测值的误差得到d轴、q轴、z1轴和z2轴的电流环未知非线性扰动fd、fq、fz1和fz2。
44、进一步地,所述步骤5)具体包括:
45、以电压矢量为控制变量,定子电流的变化为输出变量,建立d-q与z1-z2子空间的超局部无模型电流预测算法为:
46、
47、式中,did/dt为d轴电流的一阶时间导数;diq/dt为q轴电流的一阶时间导数;diz1/dt为z1轴电流的一阶时间导数;diz2/dt为z2轴电流的一阶时间导数;αd=αq=-r0/l0和αz1=αz2=-r0/lz分别为d-q、z1-z2子空间的电流系数;βd=βq=-1/l0和βz1=βz2=-1/lz分别为d-q、z1-z2子空间的电压系数;fd、fq、fz1和fz2分别为d-q、z1-z2子空间未知非线性扰动;
48、设定α和β不变,将失配导致的慢扰动计入未知非线性扰动f中,实时更新f实现电流动态跟踪与谐波抑制;
49、设定采样周期是t,超局部无模型电流预测算法通过一阶欧拉方程进行离散化,六相永磁同步电机的离散状态方程为:
50、
51、式中,和分别为第k+1个采样周期的预测值;k为离散迭代次数;ud(k)为d轴输入电压;uq(k)为q轴输入电压;uz1(k)为z1轴输入电压;uz2(k)为z2轴输入电压;id为d轴电流;iq为q轴电流;iz1为z1轴电流;iz2为z2轴电流;t为离散控制周期;αd为d轴电流系数;αq为q轴电流系数;αz1为z1轴电流系数;αz2为z2轴电流系数;βd为d轴电压系数;βq为q轴电压系数;βz1为z1轴电流系数;βz2为z2轴电流系数;为d轴目标扰动;为q轴目标扰动;为z1轴目标扰动;为z2轴目标扰动扩张状态观测器实时更新每个采样周期的和
52、在离散控制系统中,实际电压存在一拍延时,电压方程可表示为:
53、
54、式中,k为离散迭代次数;ud(k)为d轴输入电压;uq(k)为q轴输入电压;uz1(k)为z1轴输入电压;uz2(k)为z2轴输入电压;id为d轴电流;iq为q轴电流;iz1为z1轴电流;iz2为z2轴电流;t为离散控制周期;αd为d轴电流系数;αq为q轴电流系数;αz1为z1轴电流系数;αz2为z2轴电流系数;βd为d轴电压系数;βq为q轴电压系数;βz1为z1轴电流系数;βz2为z2轴电流系数;为d轴目标扰动;为q轴目标扰动;为z1轴目标扰动;为z2轴目标扰动。
55、进一步地,所述方法还包括:当线控转向路感系统受到外界未知扰动、六相永磁同步电机绕组短路或断路故障、六相永磁同步电机参数失配、六相永磁同步电机逆变器死区非线性和交叉耦合电压影响时,出现不稳定的转矩输出;建立基于多变量多目标滑模极值搜索算法的路感鲁棒控制动态平衡策略;将转矩传感器采集的实际转矩值输入至路感控制器,将转矩传感器采集的转矩信号与d轴、q轴、z1轴和z2轴实际电流值输入至路感鲁棒控制动态平衡策略中,计算得到最优的参数与权值;具体步骤如下:
56、51)将目标路感转矩与实际路感转矩的差值输入至第一代价函数中,通过设计第一滑模面函数与第二滑模面函数最小化目标路感转矩与实际路感转矩的差值;并通过第一自适应控制律实时调节第一滑模面函数和第二滑模面函数,得到自适应遗忘因子迭代学习算法最优的控制增益与遗忘因子;
57、52)将d轴、q轴、z1轴和z2轴目标电流与d轴、q轴、z1轴和z2轴实际电流的差值输入至第二代价函数中,通过设计第三滑模面函数与第四滑模面函数最小化d轴、q轴、z1轴和z2轴目标电流与d轴、q轴、z1轴和z2轴实际电流的差值;并通过第二自适应控制律实时调节第三滑模面函数和第四滑模面函数,得到扩张状态观测器最优的d-q轴和z1-z2轴带宽;
58、53)建立第一滑模面函数、第二滑模面函数和第三滑模面函数、第四滑模面函数的凸组合,通过最小化第一滑模面函数、第二滑模面函数和第三滑模面函数、第四滑模面函数的凸组合的范数,得到第一自适应控制律和第二自适应控制律的最优的权值。
59、进一步地,所述步骤51)具体包括:
60、决策变量ψ设计为:
61、
62、式中,v(t)∈rn是下一环节指定的控制输入;
63、以最小化第一代价函数为目标,利用多变量滑模极值搜索算法处理自适应遗忘因子迭代学习算法的控制增益与遗忘因子的优化问题;第一代价函数为:
64、
65、式中,t为系统的采样周期;et为目标转矩与测量转矩的误差,et=th-ts;
66、令决策变量ψ1=[λρ];路感控制器仅测量已知代价函数j1(ψ1),在无需预先获取系统与梯度变化的情况下,设计控制输入v(t)从而调节ψ1(t),ψ1(t)使j1(ψ1)最小化;
67、设计第一滑模面函数,第二滑模面函数为:
68、σ1i=j1(ψ1(t))-p1i
69、式中,p1i<0为第i个滑模面的斜率,i为1或2;
70、采用σ11和σ12分别优化参数λ和ρ,滑模面向量为:
71、σ1i=[σ11σ12]
72、考虑驱动矢量为p1i=[p11 p12],第一自适应控制律v1i(t)定义如下:
73、
74、式中,ξ1为与自适应遗忘因子算法相关的权重,通过步骤33)得到;sgn(·)为2×1signum向量;为2×1向量,为了补偿弱耦合假设,的选择受到了限制;kg1i=diag[kg11 kg12]为控制增益,是2×2对角正定矩阵,决定收敛速度;滑模极值搜索算法通过强制j1维持在递减的滑模面向量上,即σ1i趋于0来实现优化;系统向理想决策变量移动。
75、进一步地,所述步骤52)具体包括:
76、以最小化第二代价函数为目标,利用多变量滑模极值搜索算法处理扩张状态观测器的d-q子空间带宽与z1-z2子空间带宽的寻优问题,令决策变量
77、第二代价函数为:
78、
79、式中,
80、采用第三滑模面函数σ21和第四滑模面函数σ22优化带宽和滑模面向量定义为:
81、σ2j=[σ21 σ22]
82、式中,σ2j=j2-p2j(t),使得p2j<0为第j个滑动面的斜率;考虑驱动矢量为p2=[p21p2]2;j为1或2;
83、调节决策向量使得j2最小化;超局部无模型电流预测控制算法的第二自适应律ν2j(t)为:
84、
85、式中,ξ2为与超局部无模型电流预测控制算法相关的权值,通过步骤33)得到;为2×1向量;kg2j=diag[kg21 kg22]为2×2对角正定矩阵的控制增益,决定收敛速度;滑模极值搜索算法通过强制j2保持在递减的滑模面向量上,即σ2j趋于0来实现优化;系统向最佳决策变量移动。
86、进一步地,所述步骤53)具体包括:
87、第一自适应控制律的权值为ξ1=ν,第二自适应控制律的权值为ξ2=1-ν;将多目标问题转化为单目标函数;其中ν是通过多目标滑模极值搜索获得的值;滑模分量的凸组合ω为:
88、
89、式中,ω表示滑模向量sgn(sin(·))的凸组合;ω1表示第一自适应控制律的滑模向量sgn(sin(·))的凸组合;ω2表示第二自适应控制律的滑模向量sgn(sin(·))的凸组合;σ11为第一滑模面函数;σ12为第二滑模面函数;σ21为第三滑模面函数;σ22为第四滑模面函数;γ11、γ12、γ21和γ22为滑模面函数对应的2×1向量;
90、采用frobenius范数,得到||ω||:
91、
92、得到多目标问题的权值,从而获得最小范数||ω||,从而得到最优的权值。
93、进一步地,所述步骤6)具体包括:
94、六相永磁同步电机使用矢量空间解耦(vsd)进行坐标变换,将静止坐标系矢量分解在三个相互正交的d-q、z1-z2、o1-o2子空间;在同步旋转坐标系中,电压方程表示为:
95、
96、式中,ud、uq表示d-q子空间的定子电压分量;uz1、uz2表示z1-z2子空间的定子电压分量;id、iq表示d-q子空间的定子电流;iz1、iz2表示z1-z2子空间的定子电流;r0为定子电阻;d-q子空间上的电感和漏感表示为l0和lz;ωe表示电速度;ψf表示永磁体的磁通量;
97、六相永磁同步电机运动和转矩方程为:
98、
99、
100、式中,ωm为机械角速度;jm为路感电机转动惯量;te为电磁转矩;bm为路感电机阻尼系数;tl为负载转矩;pn为极对数;iq为q轴电流;fm为库仑摩擦系数。
101、本发明无需针对每种状态设计单独的解决方案,且不基于模型,不预先获取扰动不确定性边界与故障信息;在路感鲁棒控制中可以跟踪系统状态动态调节控制参数与权重,保证路感系统在各种状态下都可以达到最佳的鲁棒性能。
102、本发明的有益效果:
103、本发明可以有效提高路感系统鲁棒性,在健康或故障状态下具有更好的转矩稳定性和鲁棒性,最大程度地降低驾驶员操纵负担和车辆的操纵稳定性,实现对线控转向车辆的安全及操纵性能的提高,因此具有广阔的市场应用前景。
- 还没有人留言评论。精彩留言会获得点赞!