一种弯道自适应的智能驾驶人机共驾转向控制方法与流程
本发明涉及辅助驾驶,具体涉及一种弯道自适应的智能驾驶人机共驾转向控制方法。
背景技术:
1、l3级别自动驾驶的很多场景是由驾驶员和系统共同控制车辆,而在不同曲率的弯道中系统所需的控制权重和驾驶员控制意图判断依据应该是不同的。
技术实现思路
1、本发明的目的在于提供一种弯道自适应的智能驾驶人机共驾转向控制方法,改善转向过程中的操控体验。
2、为解决上述技术问题,本发明提供了一种技术方案:一种弯道自适应的智能驾驶人机共驾转向控制方法,其特征在于:包括;
3、根据弯道曲率,结合辅助驾驶系统所支持的最大弯道曲率与预设的系数值计算驾驶员介入力矩阈值、驾驶员接管力矩阈值、人机共驾驶系统最大权重;所述弯道曲率根据车载传感装置所获取的含有车道线的行车图像得到;当弯道曲率越大时,驾驶员介入力矩阈值、驾驶员接管力矩阈值、人机共驾驶系统最大权重随之增大;
4、获取驾驶员转动方向盘产生的驾驶员转向力矩;
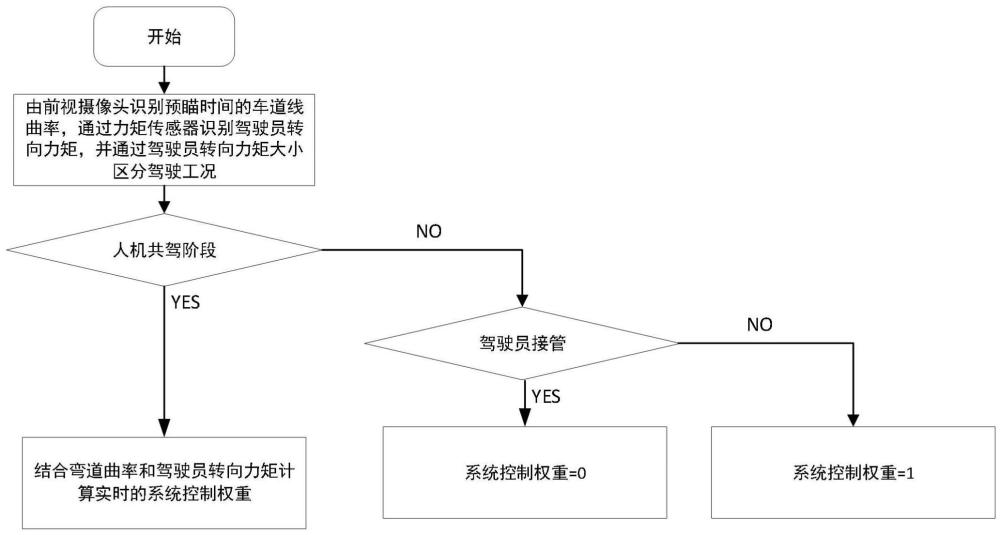
5、当驾驶员转向力矩小于等于驾驶员介入力矩阈值时,辅助驾驶系统控制权重为1,此时车辆转向动作完全由辅助驾驶系统控制;
6、当驾驶员转向力矩大于等于驾驶员接管力矩阈值时,辅助驾驶系统控制权重为0,此时车辆转向动作完全由驾驶员控制;
7、当驾驶员转向力矩大于驾驶员介入力矩阈值且小于驾驶员接管力矩阈值时,辅助驾驶系统控制权重根据驾驶员介入力矩阈值、驾驶员接管力矩阈值、人机共驾驶系统最大权重以及驾驶员转向力矩得到,辅助驾驶系统控制权重的值在0和1之间,此时驾驶员控制权重的值为1减去辅助驾驶系统控制权重的值,转向系统响应的转向扭矩控制值为驾驶员控制权重与驾驶员转向力矩的乘积,加上辅助驾驶系统的请求扭矩与辅助驾驶系统控制权重的乘积所得的和。
8、按上述方案,驾驶员介入力矩阈值trqinter计算过程如下;
9、
10、式中,trqinter0为预设的直道中的驾驶员介入力矩阈值,crvmax为辅助驾驶系统所支持的最大弯道曲率,trqinter_crv为预设的弯道叠加驾驶员介入力矩系数。
11、按上述方案,驾驶员接管力矩阈值trqtakeover计算过程如下;
12、
13、式中,trqtakeover0为预设的直道中的驾驶员接管力矩阈值,crvmax为辅助驾驶系统所支持的最大弯道曲率,trqtakeover_crv为预设的弯道叠加驾驶员接管力矩系数。
14、按上述方案,人机共驾驶系统最大权重kinter_max计算过程如下;
15、
16、式中,kinter0_max为预设的直道中的人机共驾驶系统最大权重,crvmax为辅助驾驶系统所支持的最大弯道曲率,kinter_crv为预设的弯道叠加辅助驾驶系统控制系数。
17、按上述方案,辅助驾驶系统控制权重k的计算过程如下;
18、
19、一种用于实现上文所述的弯道自适应的智能驾驶人机共驾转向控制方法的弯道自适应的智能驾驶人机共驾转向控制系统,包括;
20、弯道曲率获取模块,包括前视摄像头,用于获取前视的行驶影像并计算车前的车道线的弯道曲率crv;
21、驾驶员转向力矩获取模块,用于获取驾驶员转向力矩trq;
22、辅助驾驶系统控制权重计算模块,用于根据弯道曲率crv、驾驶员转向力矩trq,计算得到辅助驾驶系统控制权重k;
23、转向执行模块,用于根据辅助驾驶系统控制权重k、辅助驾驶系统产生的转向力矩、驾驶员转向力矩trq执行转向动作。
24、按上述方案,辅助驾驶系统控制权重k的计算过程如下;
25、
26、上式中,trqinter为根据弯道曲率crv计算得到的驾驶员介入力矩阈值trqinter,trqtakeover为根据弯道曲率crv计算得到的驾驶员接管力矩阈值,
27、kinter_max为根据弯道曲率crv计算得到的人机共驾驶系统最大权重。
28、按上述方案,驾驶员介入力矩阈值trqinter计算过程如下;
29、
30、式中,trqinter0为预设的直道中的驾驶员介入力矩阈值,crvmax为辅助驾驶系统所支持的最大弯道曲率,trqinter_crv为预设的弯道叠加驾驶员介入力矩系数。
31、按上述方案,驾驶员接管力矩阈值trqtakeover计算过程如下;
32、
33、式中,trqtakeover0为预设的直道中的驾驶员接管力矩阈值,crvmax为辅助驾驶系统所支持的最大弯道曲率,trqtakeover_crv为预设的弯道叠加驾驶员接管力矩系数。
34、按上述方案,人机共驾驶系统最大权重kinter_max计算过程如下;
35、
36、式中,kinter0_max为预设的直道中的人机共驾驶系统最大权重,crvmax为辅助驾驶系统所支持的最大弯道曲率,kinter_crv为预设的弯道叠加辅助驾驶系统控制系数。
37、本发明的有益效果是:本方案通过获取弯道曲率,并根据弯道曲率计算驾驶员介入力矩阈值、驾驶员接管力矩阈值、人机共驾驶系统最大权重,进而结合驾驶员转向力矩得到辅助驾驶系统控制权重,而后根据辅助驾驶系统控制权重对驾驶员转向力矩和辅助驾驶系统产生的转向力矩进行叠加综合,得到最终执行的转向力矩。该方案中,当弯道曲率增大时,驾驶员介入力矩阈值、驾驶员接管力矩阈值、人机共驾驶系统最大权重均增大,进而辅助驾驶系统控制权重的值不为1或0时(即人机共驾区间)的取值范围更大,更利于驾驶员参与控制,提高了在复杂弯道场景下的转向操控性。
技术特征:
1.一种弯道自适应的智能驾驶人机共驾转向控制方法,其特征在于:包括;
2.根据权利要求1所述的弯道自适应的智能驾驶人机共驾转向控制方法,其特征在于:驾驶员介入力矩阈值trqinter计算过程如下;
3.根据权利要求1所述的弯道自适应的智能驾驶人机共驾转向控制方法,其特征在于:驾驶员接管力矩阈值trqtakeover计算过程如下;
4.根据权利要求1所述的弯道自适应的智能驾驶人机共驾转向控制方法,其特征在于:人机共驾驶系统最大权重kinter_max计算过程如下;
5.根据权利要求1所述的弯道自适应的智能驾驶人机共驾转向控制方法,其特征在于:辅助驾驶系统控制权重k的计算过程如下;
6.一种用于实现权利要求1-5任一所述的弯道自适应的智能驾驶人机共驾转向控制方法的弯道自适应的智能驾驶人机共驾转向控制系统,其特征在于:包括;
7.根据权利要求6所述的弯道自适应的智能驾驶人机共驾转向控制系统,其特征在于:辅助驾驶系统控制权重k的计算过程如下;
8.根据权利要求7所述的弯道自适应的智能驾驶人机共驾转向控制系统,其特征在于:驾驶员介入力矩阈值trqinter计算过程如下;
9.根据权利要求7所述的弯道自适应的智能驾驶人机共驾转向控制系统,其特征在于:驾驶员接管力矩阈值trqtakeover计算过程如下;
10.根据权利要求7所述的弯道自适应的智能驾驶人机共驾转向控制系统,其特征在于:人机共驾驶系统最大权重kinter_max计算过程如下;
技术总结
本发明公开了一种弯道自适应的智能驾驶人机共驾转向控制方法,该方法首先获取弯道曲率,根据弯道曲率计算驾驶员介入力矩阈值、驾驶员接管力矩阈值、人机共驾驶系统最大权重,进而结合驾驶员转向力矩得到辅助驾驶系统控制权重;而后根据辅助驾驶系统控制权重对驾驶员转向力矩和辅助驾驶系统产生的转向力矩进行叠加综合,得到最终执行的转向力矩。
技术研发人员:何佼容,于晓阳,李飘,周伟光,许阁
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!