一种用于地面节点式检波器布设及回收的机器人及方法与流程
本发明属于地质超前预报,尤其涉及一种用于地面节点式检波器布设及回收的机器人及方法。
背景技术:
1、地洞联合探测技术是隧道及地下工程施工中的重要方法之一,采用“变噪为源”的方式,将数十个节点检波器按不同距离分别布设在盾构机上方的地质表面,盾构机掘进时产生地震波,当地震波遇到不良地质体分界面时,部分地震波信号反射回来被布设在地面的节点式检波器接收,通过对节点式检波器接收到的信号进行分析处理,获得隧道前方不良地质的位置和图像。
2、发明人发现,针对地面节点式检波器的布设及回收,目前主要采用人工方式实现,由于节点式检波器需要布设的数量较多,且需要人工测距;此外,为保证节点式检波器与地表的耦合度,需要为每个节点式检波器进行埋设,导致整个布设过程效率低下,且需要耗费大量人力物力;而为了提高设及回效率,目前出现的检波器取放机器人,只能实现半自动化作业,任然需要至少一个工作人员在现场进行配合施工。
技术实现思路
1、本发明为了解决上述问题,提出了一种用于地面节点式检波器布设及回收的机器人及方法,集合了运输、测量、钻孔和埋设等一系列自动化操作,极大的提高了节点式检波器布设和回收的效率,节省了人力物力。
2、为了实现上述目的,第一方面,本发明提供了一种用于地面节点式检波器布设及回收的机器人,采用如下技术方案:
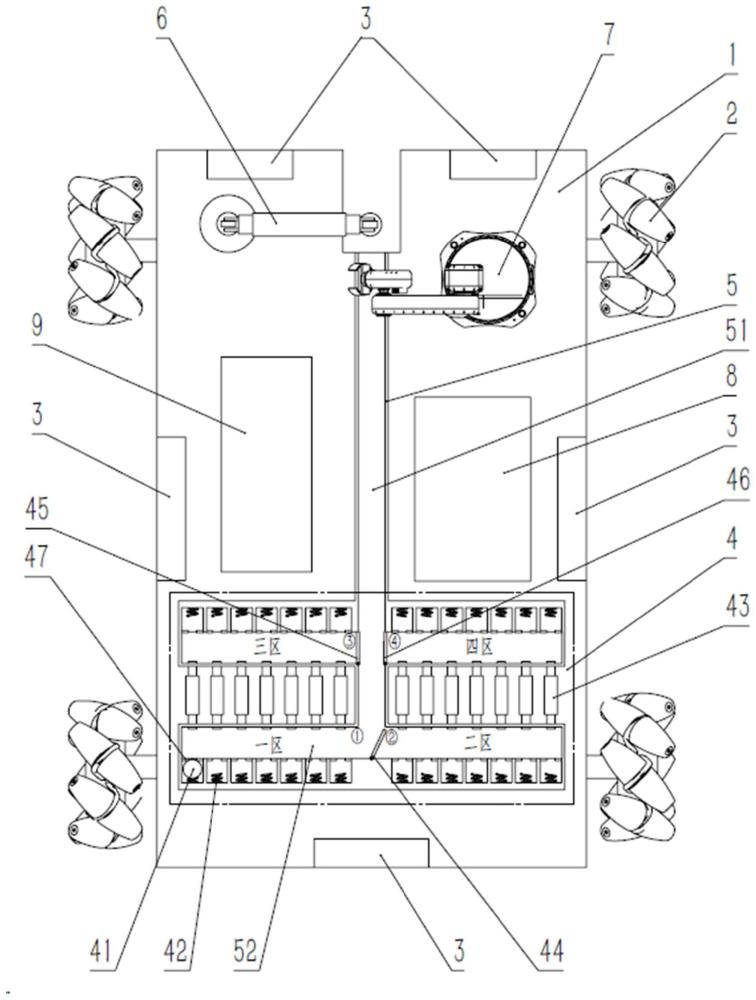
3、一种用于地面节点式检波器布设及回收的机器人,包括底盘以及设置在所述底盘上的行走装置;
4、所述底盘的一端设置有用于存放检波器的储存装置,中间设置有输送装置,另一端设置有钻孔装置和机械臂;所述底盘上还设置有导航定位系统和控制器,所述行走装置、所述输送装置、所述钻孔装置和所述机械臂均与控制器连接;
5、所述控制器根据所述导航定位系统提供的信息,控制所述行走装置行走到布设位置,所述输送装置将所述储存装置内的检波器运送到所述机械臂处,所述钻孔装置进行钻孔,所述机械臂将检波器放入钻孔内,进行检波器的布设;所述控制器根据所述导航定位系统提供的信息,控制所述行走装置行走到检波器位置处,所述机械臂将检波器捡拾到所述输送装置上,所述输送装置将捡拾的检波器运送到所述储存装置内,进行检波器的回收。
6、进一步的,所述底盘上还设置有至少一个避障装置。
7、进一步的,所述行走装置为麦克纳姆轮。
8、进一步的,所述储存装置包括设置在所述底盘上的多个伸缩机构,多个申报机构的两端分别设置有检波器放置仓,所述检波器放置仓内远离所述伸缩机构的侧面上设置有弹出机构。
9、进一步的,所述检波器放置仓靠近所述伸缩机构的一侧设置有限位门。
10、进一步的,所述伸缩机构为双向电缸。
11、进一步的,所述弹出机构为弹簧。
12、进一步的,所述输送装置包括设置在所述伸缩机构与所述检波器放置仓之间的导轨,以及设置在所述储存装置和所述机械臂之间的导轨。
13、进一步的,所述钻孔装置包括垂直设置在所述底盘上的第一伸缩杆、铰接在所述第一伸缩杆上的第二伸缩杆、铰接在所述第二伸缩杆上的第四伸缩杆以及设置在所述第四伸缩杆上的钻头;所述底盘上还设置有第三伸缩杆,所述第三伸缩杆远离所述底盘上的一端铰接在所述第一伸缩杆上。
14、为了实现上述目的,第二方面,本发明还提供了一种用于地面节点式检波器布设及回收的方法,采用如下技术方案:
15、一种用于地面节点式检波器布设及回收的方法,使用了如第一方面中所述的用于地面节点式检波器布设及回收的机器人,包括:
16、所述控制器根据所述导航定位系统提供的信息,控制所述行走装置行走到布设位置,所述输送装置将所述储存装置内的检波器运送到所述机械臂处,所述钻孔装置进行钻孔,所述机械臂将检波器放入钻孔内,进行检波器的布设;
17、所述控制器根据所述导航定位系统提供的信息,控制所述行走装置行走到检波器位置处,所述机械臂将检波器捡拾到所述输送装置上,所述输送装置将捡拾的检波器运送到所述储存装置内,进行检波器的回收。
18、与现有技术相比,本发明的有益效果为:
19、本发明中,在底盘的一端设置有用于存放检波器的储存装置,中间设置有输送装置,另一端设置有钻孔装置和机械臂;底盘上还设置有导航定位系统和控制器。检波器布设时,控制器根据导航定位系统提供的信息,控制行走装置依次行走到所有布设位置,输送装置将储存装置内的检波器运送到机械臂处,钻孔装置进行钻孔,机械臂将检波器放入钻孔内,从而完成检波器的布设;检波器回收时,控制器根据导航定位系统提供的信息,控制行走装置依次行走到所有检波器位置处,机械臂将检波器捡拾到输送装置上,输送装置将捡拾的检波器运送到储存装置内,从而完成检波器的回收;本发明集合了检波器布设和回收过程中的运输、测量、钻孔和埋设等一系列自动化操作,不需要工作人员现场配合,极大的提高了节点式检波器布设和回收的效率,节省了人力物力。
20、本发明适合于检波器分布密度较低,布设间隔较远,布设面积较大的场景;相较于人工打孔和埋设,钻孔和埋设的标准化高,差异性小,更易数据分析;布设和回收全部自动化完成,可实现无人值守、自动巡航。
技术特征:
1.一种用于地面节点式检波器布设及回收的机器人,其特征在于,包括底盘以及设置在所述底盘上的行走装置;
2.如权利要求1所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述底盘上还设置有至少一个避障装置。
3.如权利要求1所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述行走装置为麦克纳姆轮。
4.如权利要求1所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述储存装置包括设置在所述底盘上的多个伸缩机构,多个申报机构的两端分别设置有检波器放置仓,所述检波器放置仓内远离所述伸缩机构的侧面上设置有弹出机构。
5.如权利要求4所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述检波器放置仓靠近所述伸缩机构的一侧设置有限位门。
6.如权利要求4所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述伸缩机构为双向电缸。
7.如权利要求4所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述弹出机构为弹簧。
8.如权利要求4所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述输送装置包括设置在所述伸缩机构与所述检波器放置仓之间的导轨,以及设置在所述储存装置和所述机械臂之间的导轨。
9.如权利要求1所述的一种用于地面节点式检波器布设及回收的机器人,其特征在于,所述钻孔装置包括垂直设置在所述底盘上的第一伸缩杆、铰接在所述第一伸缩杆上的第二伸缩杆、铰接在所述第二伸缩杆上的第四伸缩杆以及设置在所述第四伸缩杆上的钻头;所述底盘上还设置有第三伸缩杆,所述第三伸缩杆远离所述底盘上的一端铰接在所述第一伸缩杆上。
10.一种用于地面节点式检波器布设及回收的方法,其特征在于,使用了如权利要求1-9任一项所述的用于地面节点式检波器布设及回收的机器人,包括:
技术总结
本发明属于地质超前预报技术领域,提出了一种用于地面节点式检波器布设及回收的机器人及方法,在底盘的一端设置有用于存放检波器的储存装置,中间设置有输送装置,另一端设置有钻孔装置和机械臂;底盘上还设置有导航定位系统。根据导航定位系统提供的信息,控制行走装置行走到布设位置,钻孔装置进行钻孔,机械臂将检波器放入钻孔内,完成检波器的布设;控制行走装置依次行走到所有检波器位置处,机械臂将检波器捡拾到输送装置上,输送装置将捡拾的检波器运送到储存装置内,完成检波器的回收;集合了检波器布设和回收过程中的运输、测量、钻孔和埋设等一系列自动化操作,极大的提高了节点式检波器布设和回收的效率。
技术研发人员:吴宁,刘丛林,张宝利,庞岩,李尧,曹弘毅
受保护的技术使用者:山东百廿慧通工程科技有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!