AGV防撞安全管理系统的制作方法
本技术涉及agv防撞,尤其是涉及agv防撞安全管理系统。
背景技术:
1、agv是一种以电池为动力,装有非接触导引装置的无人驾驶车辆,其主要功能表现为能在计算机监控下,按路径规划和作业要求,精确地行走并停靠到指定地点,完成—系列作业功能,可广泛应用于机械、电子、化工、冶金、邮电、汽车、机场、码头、造纸、烟草、家电、医药、食品、商业、银行、出版印刷、国防等行业。
2、专利网公开号cn109177941b公开了一种agv小车自动防撞装置,激光位移传感器2、平衡升降风机3、第一线圈5、位置传感器6、第二线圈7、托举器总成8、控制器9都安装在agv小车上;当所述位置传感器6检测到该agv小车1即将和另外的agv小车相碰撞时,控制器9发出指令使第一线圈5和第二线圈7通电同时使平衡升降风机3通电旋转,第一线圈5和第二线圈7产生的磁力将托举器总成8快速砸向地面11,使agv小车1受到一个向上的举力,同时平衡升降风机3通电旋转后也产生一个向上的举力,在这两个举力的作用下,agv小车1被举起,从而防止两辆agv小车碰撞。优点是当两台agv小车即将相碰撞时,一台agv小车自动跳起,给另一台agv小车让路,从根本上防止了两台agv小车相撞的问题。
3、以上装置为了避免agv小车相撞的问题,通过其中一台小车挑起的方式来避免相撞,但相应的,若两个小车均配有此类功能,那么在即将相撞时,则可能出现两台小车同时跳起的情况,从而导致两小车均无法继续移动,影响正常的工作开展,相应的防撞功能不够全面。
技术实现思路
1、为了解决上述提出的问题,本技术提供agv防撞安全管理系统。
2、本技术提供的agv防撞安全管理系统采用如下的技术方案:
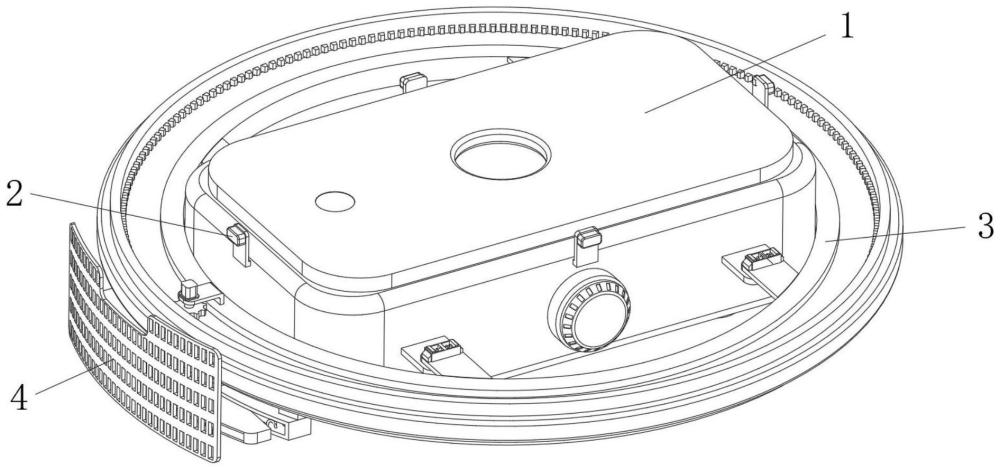
3、agv防撞安全管理系统,包括agv车体,所述agv车体外侧设置有四个距离传感器,距离传感器与agv车体电性连接,四个距离传感器呈矩形状固定连接于agv车体外侧,所述agv车体外侧设置有环形板,所述环形板上设置有卸力机构,所述agv车体底部设置有辅助刹车组件。
4、所述卸力机构包括外圈板,所述外圈板设置于环形板外侧,外圈板延伸入环形板内部并与环形板转动连接,所述外圈板内侧固定连接有齿圈,所述环形板顶部固定连接有l形板,所述l形板顶部固定连接有第一电机,第一电机通过输出轴固定连接有圆杆,所述圆杆贯穿l形板顶部并与l形板转动连接,所述圆杆外部固定连接有第一齿轮,第一齿轮设置于齿圈内侧,且第一齿轮与齿圈相啮合,所述外圈板底部设置有主体框,所述主体框一侧设置有移动框,所述移动框延伸入主体框内部并与主体框相匹配,所述移动框一侧设置有外护板,所述外圈板外侧固定连接有缓冲垫圈。
5、通过采用上述技术方案,在agv车体行驶过程中,距离传感器对agv车体四周可能存在的物体进行距离检测,以此促使agv车体进行规避达到防撞效果,若存在外界自主移动的物体向agv车体撞来且来不及规避的情况,根据来物方向,第一电机工作后,则第一齿轮带动齿圈转动,齿圈带动外圈板转动,促使防护板能够及时转动至物体冲击的方向,随后则外护板可对agv车体提供碰撞防护,同时由于外圈板可进行转动,在撞击开始后,由于外圈板的转动还可达到卸力的效果,在对agv车体提供保护的基础上,对冲击力向其他方向引导,有效加强了agv车体的安全性能。
6、优选的,所述移动框内部转动连接有两个转轴,所述转轴外部固定连接有衔接杆,所述衔接杆延伸出移动框外部,所述衔接杆一端与外护板一侧通过活动铰座活动连接,所述转轴外部固定连接有第二齿轮,所述主体框顶部开设有两个限位槽,所述移动框顶部固定连接有限位块,所述限位块贯穿限位槽并与限位槽相匹配,所述主体框底部开设有两个辅助槽,所述移动框一侧固定连接有第一弹簧,第一弹簧一端与主体框内腔一侧壁固定连接。
7、通过采用上述技术方案,限位块可在限位槽内部灵活移动,并对移动框提供限位。
8、优选的,所述主体框顶部固定连接有两个固定杆,两个固定杆顶部均与外圈板固定连接,所述移动框内部设置有两个活动板,所述移动框内部固定连接有限位杆,所述限位杆依次贯穿两个活动板,所述活动板一侧固定连接有齿条,齿条设置于第二齿轮一侧,且齿条与第二齿轮相啮合,所述活动板一侧固定连接有撞板,所述移动框底部开设有两个通槽,所述移动框内侧设置有卡板,所述卡板贯穿通槽并与通槽相匹配,所述撞板贯穿卡板。
9、通过采用上述技术方案,第二齿轮存在转动趋势后,会对齿条施加作用力。
10、优选的,所述移动框底部固定连接有辅助框板和稳定板,所述辅助框板内侧转动连接有螺纹调节杆,所述螺纹调节杆延伸出辅助框板外侧,所述辅助框板内侧设置有l形定位板,所述l形定位板延伸出辅助框板外侧,所述l形定位板贯穿稳定板,所述螺纹调节杆贯穿l形定位板并与l形定位板通过螺纹连接,所述l形定位板顶部与卡板底部相贴合。
11、通过采用上述技术方案,螺纹调节杆转动后可带动l形定位板移动,调节l形定位板移动出辅助框板外侧的距离。
12、优选的,所述移动框底部固定连接有两个竖杆,所述主体框底部设置有横板,两个竖杆分别贯穿两个辅助槽,所述横板顶部分别与两个竖杆底部固定连接,所述竖杆前后两侧均设置有固定座,固定座固定连接于主体框底部,所述竖杆一侧设置有阻拦杆,所述阻拦杆分别延伸入两个固定座内部,所述主体框底部固定连接有方形板,方形板一侧固定连接有开关,开关设置于横板一侧,所述agv车体前侧固定连接有声光报警器,声光报警器与开关电性连接。
13、通过采用上述技术方案,当横板触碰开关后,声光报警器开始进行声光报警。
14、优选的,所述固定座内部滑动连接有第一定位块,所述第一定位块延伸入阻拦杆内部并与阻拦杆内腔壁相贴合,所述第一定位块一侧固定连接有第二弹簧,第二弹簧固定连接于固定座内部。
15、通过采用上述技术方案,第二弹簧对第一定位块存在弹性作用力,促使第一定位块保持插入阻拦杆内部的状态。
16、优选的,所述卸力机构包括定位组件,定位组件包括四个第一矩形板,四个第一矩形板呈矩形状对称分布于agv车体前后两侧,且第一矩形板与agv车体固定连接,所述环形板内侧固定连接有第二矩形板,所述第二矩形板上开设有插槽,所述第一矩形板顶部固定连接有固定连接有插板,所述插板贯穿插槽并与插槽相匹配,所述插板内部滑动连接有两个第二定位块,两个第二定位块分别延伸出插板两侧外部,所述第二定位块底部与第二矩形板顶部相接触,所述第二定位块一侧固定连接有第三弹簧,第三弹簧固定连接于插板内部。
17、通过采用上述技术方案,第三弹簧对第二定位块存在弹性作用力,促使第二定位块保持延伸出插板外侧的状态。
18、优选的,所述辅助刹车组件包括辅助刹车板,所述辅助刹车板设置于agv车体底部,所述agv车体底部固定连接有两个安装板,两个安装板分别设置于辅助刹车板两侧,两个安装板之间转动连接有双向螺纹杆,其中一个安装板一侧固定连接有第二电机,第二电机通过输出轴与双向螺纹杆一端固定连接,所述双向螺纹杆外部设置有两个螺纹块,两个螺纹块均与双向螺纹杆通过螺纹连接,所述螺纹块顶部与agv车体底部相接触,所述螺纹块底部通过活动铰座活动连接有推动板,所述推动板底部与辅助刹车板顶部通过活动铰座活动连接。
19、通过采用上述技术方案,双向螺纹杆两端螺纹方向相反,可带动两个螺纹块进行相向或者相背离移动。
20、优选的,所述辅助刹车板顶部固定连接有限位伸缩杆,所述限位伸缩杆顶部与agv车体底部固定连接。
21、通过采用上述技术方案,限位伸缩杆对辅助刹车板提供限位。
22、优选的,所述agv车体后侧固定连接有plc控制器,plc控制器分别与距离传感器、第一电机和第二电机电性连接。
23、通过采用上述技术方案,距离传感器对障碍物进行检测,检测信息传输至plc控制器上,plc控制器则通过接收的信息分别对第一电机和第二电机下达工作指令。
24、综上所述,本技术包括以下有益技术效果:
25、1、agv防撞安全管理系统,通过卸力机构的设计,距离传感器对agv车体四周可能存在的物体进行距离检测,以此促使agv车体进行规避达到防撞效果,若存在外界自主移动的物体向agv车体撞来且来不及规避的情况,根据来物方向,第一电机工作后,则第一齿轮带动齿圈转动,齿圈带动外圈板转动,促使防护板能够及时转动至物体冲击的方向,随后则外护板可对agv车体提供碰撞防护,同时由于外圈板可进行转动,在撞击开始后,由于外圈板的转动还可达到卸力的效果,在对agv车体提供保护的基础上,对冲击力向其他方向引导,有效加强了agv车体的安全性能。
26、2、agv防撞安全管理系统,通过定位组件的设计,将第二定位块推入插板内部后,可直接将插板从第二矩形板上的插槽中抽离出去,完成拆卸,同理,当组装时,只需将插板贯穿插槽后,第二定位块移动出插板外侧后可促使第一矩形板和第二矩形板之间形成稳定的组装拼接关系,装卸过程简单便捷,有利于使用者自由选择组装,以及提高了携带时的便捷性。
27、3、agv防撞安全管理系统,通过辅助刹车组件的设计,距离传感器对agv车体四周可能存在的物体进行距离检测,agv车体根据检测的路况进行规避达到防撞效果,若行驶速度过快的情况下前进方向存在障碍物,为了缩短刹车距离,第二电机工作后带动双向螺纹杆转动,双向螺纹杆带动两个螺纹块进行相向移动,螺纹块带动推动板翻转,推动板翻转后对辅助刹车板进行顶推,促使辅助刹车板移动至底部贴合于地面,辅助刹车板与地面之间存在的摩擦力可有效缩短agv车体的刹车距离,避免刹车不及时而导致碰撞发生的情况。
- 还没有人留言评论。精彩留言会获得点赞!