一种半轮足式越障机构的姿态调整方法、设备及介质与流程
本发明涉及计算机,具体涉及一种半轮足式越障机构的姿态调整方法。
背景技术:
1、随着机器人技术的不断进步,人们对机器人或者越障车等移动平台在各种环境中执行复杂任务的需求日益增长,尤其是移动平台的障碍翻越或楼梯攀爬一直是困扰科技人员的技术难点。轮足式结构作为一种新型结构,其结合了轮式结构行进速度快和足式结构运动灵活的优点,开始出现在一些特定应用中,如紧凑空间内的搜索和救援、不规则地形的探索和巡检等场景。
2、目前,现有技术中的轮足式结构包括全轮足式和半轮足式两大形式,不过,相比于全轮足式越障机构,由于半轮足式越障机构在通过不规则地形时可以更灵活地调整其姿态和行进轨迹,更容易应对复杂的环境,因此,半轮足式越障机构作为一种新型越障机构越来越受到重视。但是,由于目前行业内对于半轮足式越障机构的研究尚处于起步阶段,尤其是在越障机制的方法上,尚无法自主调整半轮足式越障机构在越障前的状态,具体而言,由于半轮在遇到台阶地形前的转动状态是随机的,因此难以保证当半轮足式越障机构行驶到台阶前时刚好处于能使半轮跨到台阶上的理想状态,仍有诸多的技术难点需要克服。
3、为此,现有技术通常的解决办法是结合(视觉识别和路径规划等)ai算法,通过视觉识别和目标三维重建对目标移动平台进行位姿矫正,如中国专利cn113867333a,基于视觉感知的四足机器人楼梯攀爬规划方法及其应用。但是在摄像头位置固定的移动平台上,用于视觉感知的摄像头往往无法看到自身轮子位置,无法通过视觉感知来判断自身轮子的状态。若要安装专门感知轮子状态的摄像头,则需装于平台底部,容易受环境条件干扰(比如泥沙,污水等),导致视觉识别和目标三维重建算法的精度和鲁棒性下降,而且基于视觉识别和目标三维重建的姿态调整系统较为复杂,一定程度上影响了越障机构进行姿态调整的实时性,故依靠视觉识别和目标三维重建来实现越障机构的姿态调整控制存在诸多弊端。
技术实现思路
1、针对上述技术问题,本发明提出了一种半轮足式越障机构的姿态调整方法、设备及介质,旨在基于半轮足式越障机构自身的运动信息实现对机构姿态的快速调整,在一定程度上避免外部环境影响的同时,大幅度降低半轮足式越障机构姿态调整的复杂性。
2、为此,本发明采用如下技术方案:一种半轮足式越障机构的姿态调整方法,所述半轮足式越障机构包括一端相互连接的两个轮臂,两个轮臂始终反向运动,每个轮臂的另一端均安装有半轮,两个半轮在转动时始终保持相对设置,包括以下步骤:
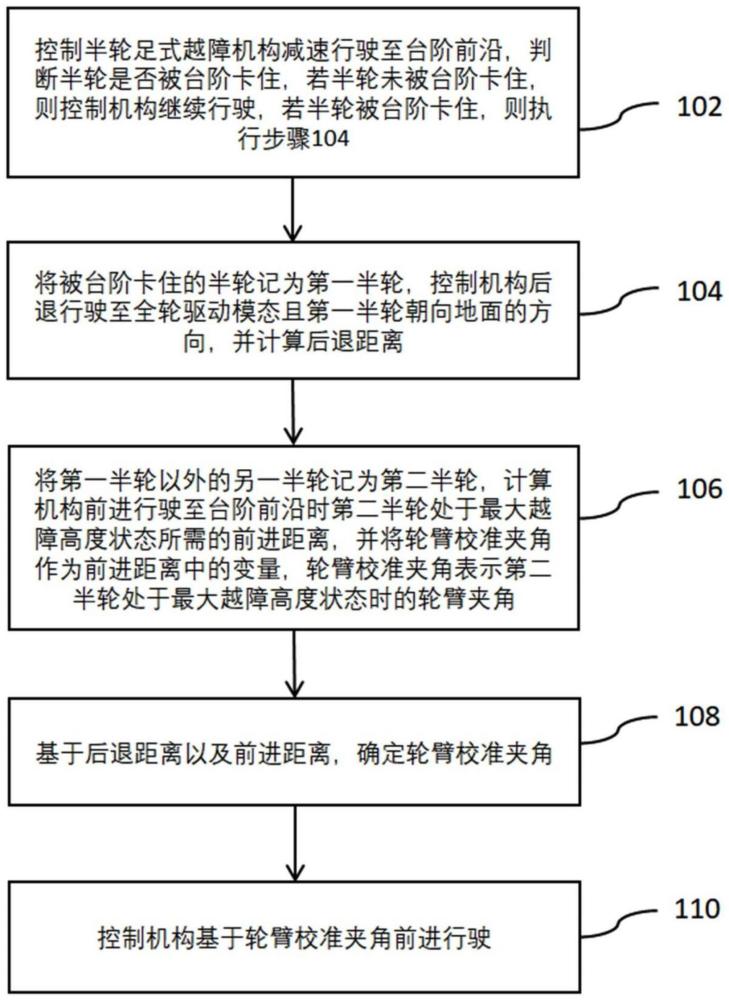
3、控制半轮足式越障机构行驶至台阶前沿,判断半轮是否被台阶卡住,若半轮未被台阶卡住,则控制机构继续行驶,若半轮被台阶卡住,则执行下一步骤:
4、将被台阶卡住的半轮记为第一半轮,控制机构后退行驶至全轮驱动模态且第一半轮朝向地面的方向,并计算后退距离;
5、将第一半轮以外的另一半轮记为第二半轮,计算机构前进行驶至台阶前沿时第二半轮处于最大越障高度状态所需的前进距离,并将轮臂校准夹角作为前进距离中的变量,所述轮臂校准夹角表示第二半轮处于最大越障高度状态时的轮臂夹角;
6、基于所述后退距离以及前进距离,确定轮臂校准夹角;
7、控制机构基于所述轮臂校准夹角前进行驶。
8、其中,最大越障高度即采用半轮足式越障机构的机器人或车辆等移动平台在攀爬台阶时,半轮能够跨越的最大高度,与半轮本身的结构设计有关,是定值,本发明将最大越障高度状态作为姿态调整的目标状态。
9、本发明的技术构思为:当半轮被台阶卡住时,通过将半轮足式越障机构被台阶卡住时的姿态调整过程分为后退过程以及前进过程,先基于半轮足式越障机构自身的运动信息计算后退距离,再基于姿态调整的目标状态计算机构所需的前进距离,然后基于前进距离以及后退距离之间的关系,确定前进距离中作为变量的轮臂校准夹角,最后控制机构根据轮臂校准夹角进行前进行驶,使得机构行驶至台阶前沿时处于最大越障高度状态而不会被台阶卡住,从而实现半轮足式越障机构姿态的快速调整。
10、相比于依赖复杂的视觉识别和目标三维重建方法,本发明提出的一种半轮足式越障机构的姿态调整方法更加简单直接,大幅度降低了半轮足式越障机构姿态调整的复杂性,而且本方法基于半轮足式越障机构自身的运动信息进行姿态调整,大幅度降低了外部环境可能带来的不利影响,因此在复杂环境下具有更高的鲁棒性和稳定性,具有较高的实用价值。
11、作为优选,所述半轮上设置有转动角度传感器以及半轮驱动电机,则所述判断半轮是否被台阶卡住,包括:
12、将所述转动角度传感器的数据与半轮驱动电机的电压输出进行对比,当半轮驱动电机的电压正常输出但转动角度传感器的数据没有变化时,判断半轮被台阶卡住,否则判断半轮未被台阶卡住。
13、作为优选,所述控制机构后退行驶至全轮驱动模态且第一半轮朝向地面的方向,包括:
14、控制机构后退行驶至轮臂夹角合并为0°,此时第一半轮以及第二半轮处于同一轴心上并开始同步驱动第一半轮以及第二半轮,作为全轮驱动模态;
15、维持所述全轮驱动模态,控制机构继续后退行驶至第一半轮最左侧的轮辐与垂线的夹角为90°。
16、作为优选,所述计算后退距离,包括:
17、获取第一半轮被台阶卡住时的轮臂夹角以及最左侧的轮辐与垂线的夹角;
18、基于所述第一半轮被台阶卡住时的轮臂夹角,计算轮臂在机构后退行驶至全轮驱动模态的过程中产生的位移,记为第一后退位移;
19、基于第一半轮被台阶卡住时最左侧的轮辐与垂线的夹角,计算第一半轮在机构后退行驶至全轮驱动模态且第一半轮朝向地面的方向的过程中产生的位移,记为第二后退位移;
20、将所述第一后退位移、第二后退位移以及半轮半径之和,作为后退距离。
21、作为优选,所述后退距离的表达式为:
22、
23、其中,h表示后退距离,β表示第一半轮被台阶卡住时最左侧的轮辐与垂线的夹角,r表示半轮半径,α′表示第一半轮被台阶卡住时的轮臂夹角,l表示轮臂长度。
24、作为优选,计算机构前进行驶至台阶前沿时第二半轮处于最大越障高度状态所需的前进距离,包括:
25、基于所述轮臂校准夹角计算轮臂在机构前进行驶至台阶前沿时第二半轮处于最大越障高度状态的过程中产生的位移,记为第一前进位移;
26、基于最大越障高度确定第二半轮处于最大越障高度状态时的切入角;
27、基于所述第二半轮处于最大越障高度状态时的切入角,计算第二半轮在机构前进行驶至台阶前沿时第二半轮处于最大越障高度状态的过程中产生的位移,记为第二前进位移;
28、将所述第一前进位移、第二前进位移以及轮毂中心半径之和,作为前进距离。
29、作为优选,所述前进距离的表达式为:
30、
31、其中,h′表示前进距离,r表示轮毂中心半径,r表示半轮半径,α表示作为变量的轮臂校准夹角,l表示轮臂长度。
32、作为优选,基于所述后退距离以及前进距离,确定轮臂校准夹角,包括:
33、根据后退距离等于前进距离,确定作为前进距离中的变量的轮臂校准夹角。
34、一种电子设备,包括处理器以及存储器;
35、所述处理器与所述存储器相连;
36、所述存储器,用于存储可执行程序代码;
37、所述处理器通过读取所述存储器中存储的可执行程序代码来运行与所述可执行程序代码对应的程序,以用于执行如前述的一种半轮足式越障机构的姿态调整方法。
38、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如前述的一种半轮足式越障机构的姿态调整方法。
39、本发明的有益技术效果至少包括:采用一种半轮足式越障机构的姿态调整方法、设备及介质,通过将半轮足式越障机构被台阶卡住时的姿态调整过程分为后退过程以及前进过程,先基于半轮足式越障机构自身的运动信息计算后退距离,再基于姿态调整的目标状态计算机构所需的前进距离,然后基于前进距离以及后退距离之间的关系,确定前进距离中作为变量的轮臂校准夹角,最后控制机构根据轮臂校准夹角进行前进行驶,使得机构行驶至台阶前沿时处于最大越障高度状态而不会被台阶卡住,从而实现半轮足式越障机构姿态的快速调整。相比于依赖复杂的视觉识别和目标三维重建方法,本发明提出的一种半轮足式越障机构的姿态调整方法更加简单直接,大幅度降低了半轮足式越障机构姿态调整的复杂性,而且本方法基于半轮足式越障机构自身的运动信息进行姿态调整,大幅度降低了外部环境可能带来的不利影响,因此在复杂环境下具有更高的鲁棒性和稳定性,具有较高的实用价值。
40、本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
- 还没有人留言评论。精彩留言会获得点赞!