电动助力转向卡滞的监测方法、系统及其车辆与流程
本发明涉及车辆,尤其涉及一种电动助力转向卡滞的监测方法、系统及其车辆。
背景技术:
1、随着汽车技术的发展,电动助力转向技术已经成为当前乘用车转向系统的主要技术,控制器通过控制电机提供助力,帮助驾驶员控制车辆转向,从而提高了驾驶员的操控感和安全性;同时控制器通过系统自检和故障诊断功能来检测故障,并在发现故障时提供相应的警报和故障代码。
2、常用的电动助力转向系统(electric power steering,eps)有管柱式电动转向系统(column electric power steering,c-eps)、单齿轮式电动转向系统(pinion electricpower steering,p-eps)、双齿轮式电动转向系统(dual pinion electric powersteering,dp-eps)和齿条式电动转向系统(rack electric power steering,r-eps)。其中c-eps和dp-eps均通过蜗轮蜗杆减速机构实现电机的降速增扭。蜗轮蜗杆由于中心距、齿形参数、齿面侧粗糙度、油脂性能等设计不合理原因,在运行过程中会因为润滑不良导致粘滑效应,当粘滑效应严重时将会直接反馈在驾驶员的手感上,驾驶员感知为转向卡滞,这时就必须通过修改蜗轮蜗杆匹配参数或增加卡滞补偿策略来消除卡滞问题,但如何通过控制器的诊断策略来识别转向卡滞问题是一个难题。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种电动助力转向卡滞的监测方法,能够准确识别出转向卡滞的问题,有利于提高故障的识别率。
2、本发明还提供包括电动助力转向系统、车辆控制器及其车辆。
3、根据本发明实施例第一方面的电动助力转向卡滞的监测方法,包括:
4、应用于电动助力转向系统,所述电动助力转向系统包括转向盘和电机,包括:
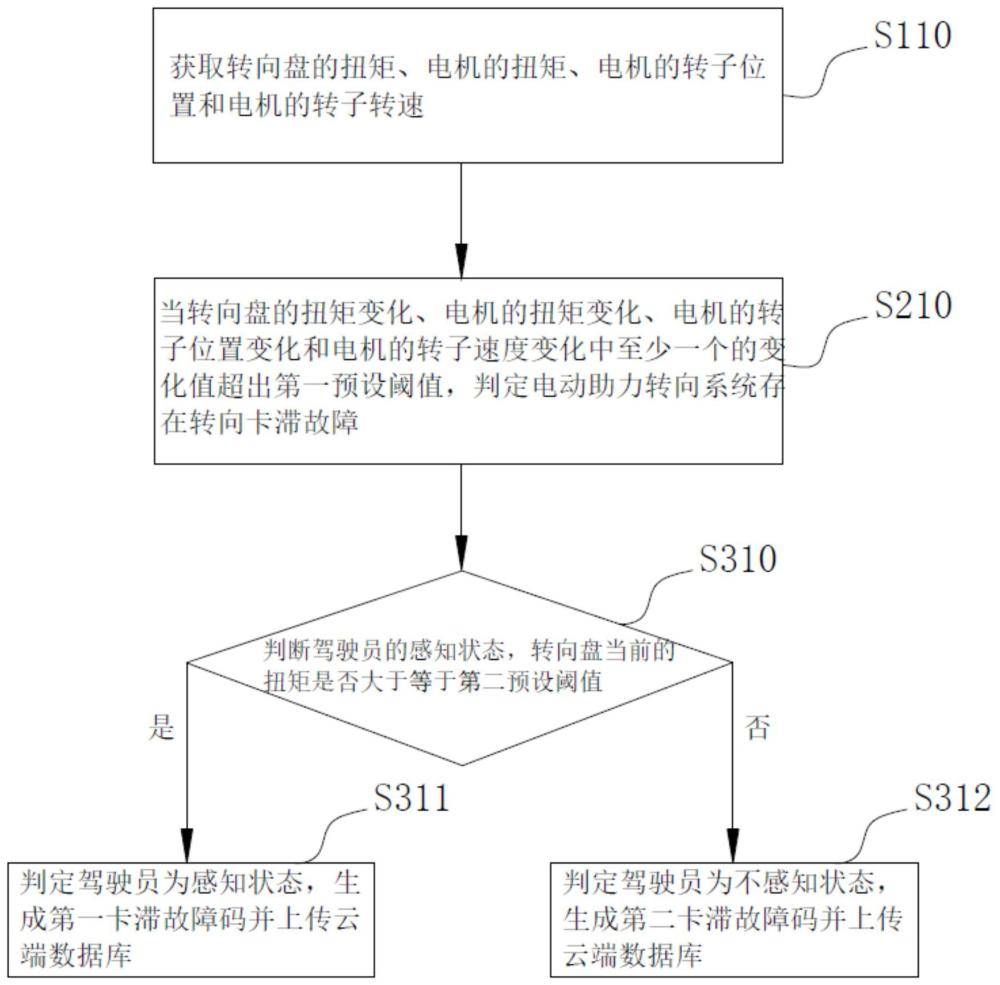
5、获取所述转向盘的扭矩、所述电机的扭矩、所述电机的转子位置和所述电机的转子转速;
6、当所述转向盘的扭矩变化、所述电机的扭矩变化、所述电机的转子位置变化和所述电机的转子速度变化中至少一个的变化值超出第一预设阈值,判定所述电动助力转向系统存在转向卡滞故障。
7、根据本发明实施例的电动助力转向卡滞的监测方法,至少具有如下有益效果:
8、监测方法适用于电动助力转向系统,通过获取转向盘的扭矩、电机的扭矩、电机的转子位置和电机的转子转速的信号,根据上述信号来综合判断eps系统是否存在转向卡滞的问题;由于驾驶员在转向时,转向盘的扭矩随着驾驶员转向操作逐步增大,如果此时蜗轮蜗杆没有发生卡滞问题,那么在电机转动的瞬间,上述信号将平滑变化,不会发生异常突变;当转向盘的扭矩变化、电机的扭矩变化、电机的转子位置变化和电机的转子速度变化中至少一个的变化值超出第一预设阈值,即可判定电动助力转向系统存在转向卡滞故障,能够准确识别出转向卡滞的问题,有利于提高故障的识别率,便于对卡滞问题进行分析,用于设计人员对故障统计分析提供依据,适用于c-eps、p-eps和dp-eps等系统。
9、根据本发明的一些实施例,所述获取所述转向盘的扭矩、所述电机的转子位置、所述电机的扭矩和所述电机的转子转速,包括:
10、根据所述转向盘当前时刻与上一时刻的扭矩确定所述转向盘的扭矩变化值;
11、根据所述电机当前时刻与上一时刻的扭矩确定所述电机的扭矩变化值;
12、根据所述电机当前时刻与上一时刻的转子位置确定所述电机的转子位置变化值;
13、根据所述电机当前时刻与上一时刻的转子速度确定所述电机的转子速度变化值。
14、根据本发明的一些实施例,所述判定所述电动助力转向系统存在转向卡滞故障之后,还包括:
15、控制生成卡滞故障码,并将所述卡滞故障码上传云端数据库。
16、根据本发明的一些实施例,所述判定所述电动助力转向系统存在转向卡滞故障之后,还包括:
17、根据所述转向盘当前的扭矩判断驾驶员的感知状态;
18、当所述转向盘当前的扭矩大于等于第二预设阈值,判定驾驶员为感知状态,并生成第一卡滞故障码;
19、当所述转向盘当前的扭矩小于第二预设阈值,判定驾驶员为不感知状态,并生成第二卡滞故障码。
20、根据本发明实施例第二方面的电动助力转向系统,所述电动助力转向系统包括转向盘、电机和控制器,所述控制器被配置为获取所述转向盘的扭矩、所述电机的扭矩、所述电机的转子位置和所述电机的转子转速;且当所述转向盘的扭矩变化、所述电机的扭矩变化、所述电机的转子位置变化和所述电机的转子速度变化中至少一个的变化值超出第一预设阈值,判定所述电动助力转向系统存在转向卡滞故障。
21、根据本发明实施例的电动助力转向系统,至少具有如下有益效果:
22、电动助力转向系统可通过车辆已有的传感器采集转向盘的扭矩、电机的扭矩、电机的转子位置和电机的转子转速的信号,根据上述信号来综合判断eps系统是否存在转向卡滞的问题;当转向盘的扭矩变化、电机的扭矩变化、电机的转子位置变化和电机的转子速度变化中至少一个的变化值超出第一预设阈值,即可判定电动助力转向系统存在转向卡滞故障,能够准确识别出转向卡滞的问题,有利于提高故障的识别率,便于对卡滞问题进行分析,用于设计人员对故障统计分析提供依据,有助于提高车辆驾驶安全性。
23、根据本发明的一些实施例,所述控制器还被配置为,
24、根据所述转向盘当前时刻与上一时刻的扭矩确定所述转向盘的扭矩变化值;
25、根据所述电机当前时刻与上一时刻的扭矩确定所述电机的扭矩变化值;
26、根据所述电机当前时刻与上一时刻的转子位置确定所述电机的转子位置变化值;
27、根据所述电机当前时刻与上一时刻的转子速度确定所述电机的转子速度变化值。
28、根据本发明的一些实施例,所述控制器还被配置为,控制生成卡滞故障码,并将所述卡滞故障码上传云端数据库。
29、根据本发明的一些实施例,所述控制器还被配置为,根据所述转向盘当前的扭矩判断驾驶员的感知状态;当所述转向盘当前的扭矩大于等于第二预设阈值,判定驾驶员为感知状态,并生成第一卡滞故障码;当所述转向盘当前的扭矩小于第二预设阈值,判定驾驶员为不感知状态,并生成第二卡滞故障码。
30、根据本发明实施例第三方面的车辆控制器,包括至少一个处理器;以及存储器,其存储有指令,当通过至少一个处理器来执行该指令时,执行上述实施例第一方面所述的电动助力转向卡滞的监测方法。
31、根据本发明实施例的车辆控制器,至少具有如下有益效果:
32、车辆控制器执行上述实施例的电动助力转向卡滞的监测方法,当转向盘的扭矩变化、电机的扭矩变化、电机的转子位置变化和电机的转子速度变化中至少一个的变化值超出第一预设阈值,即可判定电动助力转向系统存在转向卡滞故障,能够准确识别出转向卡滞的问题,有利于提高故障的识别率,便于对卡滞问题进行分析,用于设计人员对故障统计分析提供依据,适用于c-eps、p-eps和dp-eps等系统。
33、根据本发明实施例第四方面的车辆,包括上述实施例第二方面所述的电动助力转向系统,或上述实施例第三方面所述的车辆控制器。
34、由于车辆采用了上述实施例的电动助力转向系统或车辆控制器的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再赘述。
35、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
- 还没有人留言评论。精彩留言会获得点赞!