一种履带走行车辆转向控制方法与流程
本发明属于铁路路面自走行作业机械,具体涉及一种履带走行车辆转向控制方法。
背景技术:
1、铁路工程机械车辆常用的有道岔履带式铺换车,这种车辆适用性广,能够在复杂恶劣的地形作业,但是行驶速度慢,转向控制不灵活。如何使车辆既能够适应复杂恶劣的地形又能灵活转向控制是现在急需解决的问题。
2、现有的铺换车履带支腿控制性能差,大大降低了整车的安全性和车辆的智能化水平。专利号cn202310544044.x公开了一种履带走行车辆控制方法,该专利采用技术方案:包括铺换车、运输车,所述铺换车上设置有第一支腿、第二支腿、第三支腿以及第四支腿,并且第一支腿、第二支腿、第三支腿以及第四支腿两两对称设置于所述铺换车的两侧,所述运输车上设置有超声波测距传感器a,所述运输车上设置有超声波测距传感器b。该专利技术方案主要提供了道岔铺换装置的核心控制方法及算法,保证了在道岔搬运的过程中,避免重心出现较大偏移,解决了单车起吊道岔重心检测问题。但该方案仍然不能实现对各履带的灵活控制,行驶过程中容易实现拖拽,降低车辆的安全性和智能化水平。因此有必要提出改进。
技术实现思路
1、本发明解决的技术问题:提供一种履带走行车辆转向控制方法,本发明目的在于解决道岔铺换机单机四轮履带以及双机重连八轮履带走行转向控制问题,实现道岔铺换装置单机的走行转向控制、双机重连的转向控制,提升整车的安全性及车辆的智能化水平。
2、为达到上述目的,本发明采用的技术方案:
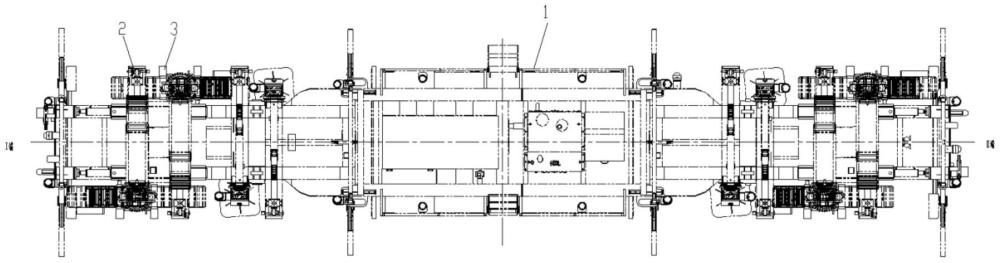
3、一种履带走行车辆转向控制方法,包括铺换机,所述铺换机包括主梁总成和在吊装梁两侧分别依次设置的第一履带支腿a、第二履带支腿b、第三履带支腿c以及第四履带支腿d,所述铺换机同一端两侧的两个履带支腿非对称设置,每个履带支腿上安装一个横向位移传感器,用于实时检测支腿横向伸出位移参与转向角度计算,每条履带支腿上安装一个旋转编码器,用于实时反馈履带轮角度。
4、其中,所述铺换机单机转向具体算法为:
5、其中,铺换机的主梁总成的中心为o点,车辆中心速度vo和转向半径r为已知可调参数;第一履带支腿a、第二履带支腿b、第三履带支腿c以及第四履带支腿d的中心分别为a点、b点、c点、d点,a点、b点、c点、d点到主梁总成的中心线的垂点分别以e点、f点、g点、h点;a点到宽度方向中心线的垂点为m;下面对第一履带支腿a的线速度和方向角进行计算:
6、设第一履带支腿a的线速度为va,方向角为∠a;
7、1)直角三角形中mta中已知2边长度ma=oe和mt=r+ae,可求得∠mta即∠a的大小:
8、2)ma=oe,为固定已知值
9、3)mt=r+ae,r为已知可调参数,ae由横向位移传感器测量反馈
10、
11、若物体绕t点做匀速回转运动,易知物体上任意一点的线速度与此点到回转中心得距离成正比。因此可知:
12、
13、设定车体中心的速度为vo,可得:
14、
15、
16、其中,vo、r为已知可调参数
17、同理,可依次求得第二履带支腿b、第三履带支腿c以及第四履带支腿d的线速度vb、vc、vd和偏转角∠b、∠c和∠d;
18、单台所述铺换机(1)具备4种转向方式,ⅰ端①侧、ⅰ端②侧、ⅱ端①侧、ⅱ端②侧。
19、进一步地,两台所述铺换机联机,按照第一履带支腿a的线速度为va、方向角为∠a的计算方法,两个所述铺换机联机的8个履带轮的转向角度及速度可求出;
20、双台所述铺换机具备4种转向方式,ⅰ端①侧、ⅰ端②侧、ⅱ端①侧、ⅱ端②侧。
21、进一步地,所述第一履带支腿a、第二履带支腿b、第三履带支腿c以及第四履带支腿d均为动力履带。
22、本发明与现有技术相比的优点:
23、1、本方案中通过在道岔铺换机单机上设置4条均带动力的履带轮,道岔铺换机同一端两侧的履带轮不在一条轴线上为非对称布置,并提供道岔铺换装置的核心整车控制算法;解决了道岔铺换机单机四轮履带走行转向控制问题,解决了道岔铺换机双机重连八轮履带走行转向控制问题,实现道岔铺换装置单机的走行转向控制、双机重连的转向控制,提升了整车的安全性及车辆的智能化水平;
24、2、本方案中道岔铺换机双机可重连,具备整体双机8轮转向功能;道岔铺换机双机转向时,该控制方法转向中心点在双机重连机构处,此时重连机构处于转向轨迹切线处,保证重连机构不会出现较大的相互夹角,减小了重连机构的设计难度及强度要求;
25、3、本方案中道岔铺换机单机4轮转向及双机8轮转向全部满足阿克曼转向原理,该方法保证能实时控制每个轮子的转向角度及速度,避免了支腿转向时拖拽情况,加强了整机的安全程度;
26、4、本方案中道岔铺换机单机4轮转向及双机8轮转向最小转向半径可达到100m;可实现ⅰ端①侧、ⅰ端②侧、ⅱ端①侧、ⅱ端②侧4种转向方式,整体转向半径小、转向方式多、操作灵活,提高了车辆整体效率。
技术特征:
1.一种履带走行车辆转向控制方法,包括铺换机(1),其特征在于:所述铺换机(1)包括主梁总成和在吊装梁两侧分别依次设置的第一履带支腿a、第二履带支腿b、第三履带支腿c以及第四履带支腿d,所述铺换机(1)同一端两侧的两个履带支腿非对称设置,每个履带支腿上安装一个横向位移传感器(2),用于实时检测支腿横向伸出位移参与转向角度计算,每条履带支腿上安装一个旋转编码器(3),用于实时反馈履带轮角度。
2.根据权利要求1所述的一种履带走行车辆转向控制方法,其特征在于:所述铺换机(1)单机转向具体算法为:
3.根据权利要求2所述的一种履带走行车辆转向控制方法,其特征在于:两台所述铺换机(1)联机,按照第一履带支腿a的线速度va、方向角∠a的计算方法,两个所述铺换机(1)联机的8个履带轮的转向角度及速度可求出;
4.根据权利要求1所述的一种履带走行车辆转向控制方法,其特征在于:所述第一履带支腿a、第二履带支腿b、第三履带支腿c以及第四履带支腿d均为动力履带。
技术总结
提供一种履带走行车辆转向控制方法,属于铁路路面自走行作业机械技术领域。包括铺换机,铺换机包括主梁总成和在吊装梁两侧分别依次设置的第一履带支腿A、第二履带支腿B、第三履带支腿C以及第四履带支腿D,铺换机同一端两侧的两个履带支腿非对称设置,每个履带支腿上安装一个横向位移传感器,用于实时检测支腿横向伸出位移参与转向角度计算,每条履带支腿上安装一个旋转编码器,用于实时反馈履带轮角度。本发明解决了道岔铺换机单机四轮履带以及双机重连八轮履带走行转向控制问题,实现道岔铺换装置单机的走行转向控制、双机重连的转向控制,提升了整车的安全性及车辆的智能化水平。
技术研发人员:贠泽,孟刚刚,张喜云,朱红军,李华伟,王满成,常星辰,马嘉斌,滕星东,陈泽涛
受保护的技术使用者:宝鸡中车时代工程机械有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!