车辆线控转向控制方法、系统、电子设备、车辆及介质与流程
本发明涉及智能汽车,尤其是一种车辆线控转向控制方法、系统、电子设备、车辆及介质。
背景技术:
1、对于线控转向系统来说,由于路感模拟器与线控转向执行器之间取消了中间轴机械连接,因此线控转向系统无法依据车辆的特性进行回正。相关技术中,往往通过机械连接器件的运动参数进行转向装置的主动回正控制,该方式无法适应线控转向系统,无法提升线控转向系统的主动回正准确度。
技术实现思路
1、本发明的目的在于至少一定程度上解决现有技术中存在的技术问题之一。
2、为此,本发明的目的在于提供一种高准确度的车辆线控转向控制方法、系统、电子设备、车辆及介质。
3、为了达到上述技术目的,本发明实施例所采取的技术方案包括:
4、一方面,本发明实施例提供了一种车辆线控转向控制方法,包括以下步骤:
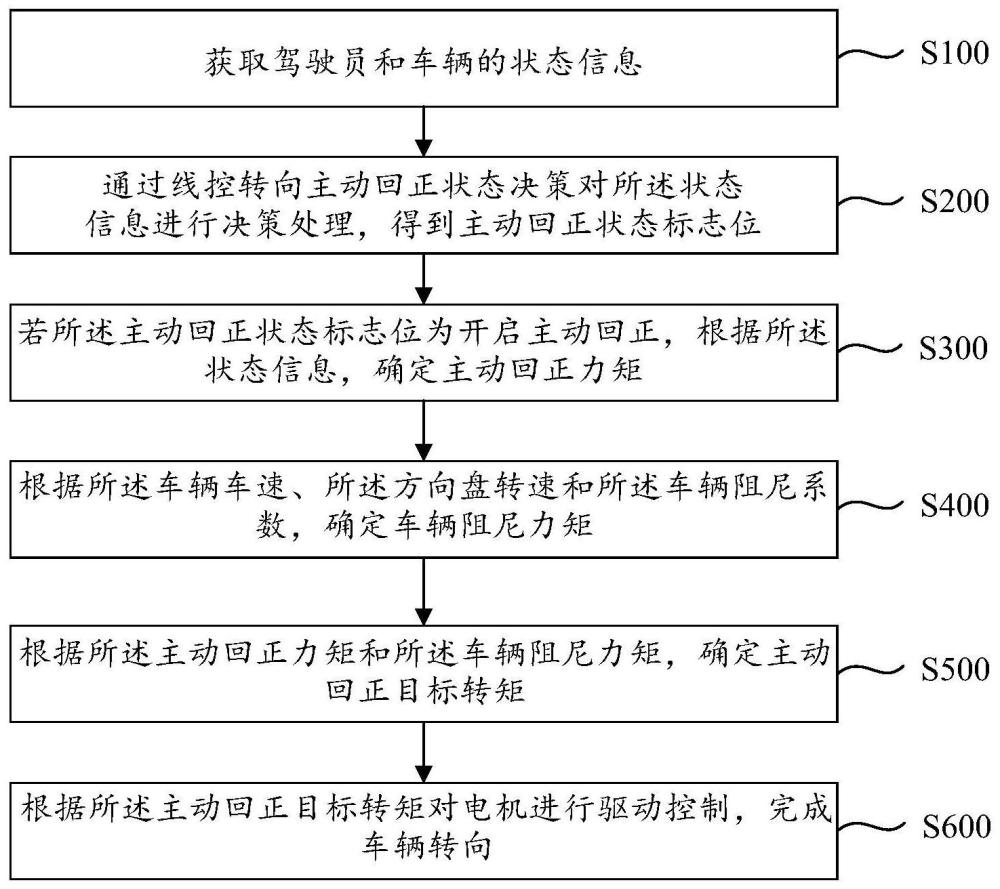
5、本发明实施例的车辆线控转向控制方法,该方法包括:获取驾驶员和车辆的状态信息;所述状态信息包括车辆车速、方向盘转速和车辆阻尼系数;通过线控转向主动回正状态决策对所述状态信息进行决策处理,得到主动回正状态标志位;若所述主动回正状态标志位为开启主动回正,根据所述状态信息,确定主动回正力矩;根据所述车辆车速、所述方向盘转速和所述车辆阻尼系数,确定车辆阻尼力矩;根据所述主动回正力矩和所述车辆阻尼力矩,确定主动回正目标转矩;根据所述主动回正目标转矩对电机进行驱动控制,完成车辆转向。本技术实施例通过驾驶员和车辆的状态信息,确定主动回正状态标志位,进而确定是否开启主动回正控制过程。然后,本技术实施例通过状态信息,确定主动回正力矩;结合车辆阻尼系统,确定主动回正目标转矩;最后,通过主动回正目标转矩对电机进行驱动控制,完成车辆转向。本技术实施例通过驾驶员和车辆的状态信息,结合车辆阻尼系数,确定主动回正目标转矩,能够实现对车辆转向的精准控制,提升主动回正控制的准确度。
6、另外,根据本发明上述实施例的车辆线控转向控制方法,还可以具有以下附加的技术特征:
7、进一步地,本发明实施例的车辆线控转向控制方法,所述状态信息还包括方向盘转矩和方向盘转角,所述通过线控转向主动回正状态决策对所述状态信息进行决策处理,得到主动回正状态标志位,包括:
8、根据所述方向盘转矩、所述方向盘转角和所述方向盘转速,确定方向盘状态;
9、根据所述方向盘转矩、所述方向盘转角和所述方向盘转速,确定驾驶操作状态;
10、根据所述方向盘状态和所述驾驶操作状态,确定主动回正状态标志位。
11、进一步地,在本发明的一个实施例中,所述根据所述方向盘转矩、所述方向盘转角和所述方向盘转速,确定方向盘状态,包括:
12、对所述方向盘转矩进行校验,确定转矩标志位;
13、对所述方向盘转角进行校验,确定转角标志位;
14、对所述方向盘转速进行校验,确定转速标志位;
15、对所述方向盘转速进行微分融合,确定方向盘角速度,对所述方向盘角速度进行校验,确定角速度标志位;
16、根据所述转矩标志位、所述转角标志位、所述转速标志位和所述角速度标志位,确定方向盘状态。
17、进一步地,在本发明的一个实施例中,所述状态信息包括方向盘角度,所述根据所述状态信息,确定主动回正力矩,包括以下步骤:
18、获取主动回正目标角度;
19、根据所述主动回正目标角度和所述方向盘角度,确定主动回正转速;
20、根据所述主动回正转速与所述方向盘转速,确定主动回正力矩。
21、进一步地,在本发明的一个实施例中,所述根据所述主动回正目标角度和所述方向盘角度,确定主动回正转速,包括:
22、根据所述主动回正目标角度和所述方向盘角度之差,确定主动回正转角差值;
23、对所述主动回正转角差值进行差值方向判断,得到主动回正请求方向;
24、根据所述主动回正转角差值和预设转速阈值,确定主动回正请求转速;
25、对所述主动回正请求方向和所述主动回正请求转速进行转速融合,得到主动回正转速。
26、进一步地,在本发明的一个实施例中,所述根据所述主动回正转速与所述方向盘转速,确定主动回正力矩,包括:
27、根据所述主动回正转速与所述方向盘转速之差,确定主动回正转速差值;
28、对所述主动回正转速差值进行比例融合,确定第一融合转矩;
29、对所述主动回正转速差值进行微分融合,确定第二融合转矩;
30、对所述第一融合转矩和所述第二融合转矩进行转矩融合处理,确定主动回正力矩。
31、进一步地,在本发明的一个实施例中,所述车辆阻尼系数包括主动阻尼系数和常值阻尼系数,所述根据所述主动回正力矩和所述车辆阻尼力矩,确定主动回正目标转矩,包括:
32、根据所述车辆车速、所述方向盘转速和所述主动阻尼系数,确定主动阻尼力矩;
33、根据所述车辆车速、所述方向盘转速和所述常值阻尼系数,确定常值阻尼力矩;
34、根据所述主动回正力矩、所述主动阻尼力矩和所述常值阻尼力矩,确定主动回正目标转矩。
35、另一方面,本发明实施例提出了一种车辆线控转向控制系统,包括:
36、获取模块,用于获取驾驶员和车辆的状态信息;所述状态信息包括车辆车速、方向盘转速和车辆阻尼系数;
37、标志确定模块,用于通过线控转向主动回正状态决策对所述状态信息进行决策处理,得到主动回正状态标志位;
38、回正力矩确定模块,用于若所述主动回正状态标志位为开启主动回正,根据所述状态信息,确定主动回正力矩;
39、阻尼力矩确定模块,用于根据所述车辆车速、所述方向盘转速和所述车辆阻尼系数,确定车辆阻尼力矩;
40、目标转矩确定模块,用于根据所述主动回正力矩和所述车辆阻尼力矩,确定主动回正目标转矩;
41、转向模块,用于根据所述主动回正目标转矩对电机进行驱动控制,完成车辆转向。
42、另一方面,本发明实施例提供了一种电子设备,包括:
43、至少一个处理器;
44、至少一个存储器,用于存储至少一个程序;
45、当所述至少一个程序被所述至少一个处理器执行时,使得所述至少一个处理器实现上述的车辆线控转向控制方法。
46、另一方面,本发明实施例提供了一种车辆,包括上述的车辆线控转向控制系统或上述的电子设备。
47、另一方面,本发明实施例提供了一种存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于实现上述的车辆线控转向控制方法。
48、本发明实施例提供一种车辆线控转向控制方法,该方法包括:获取驾驶员和车辆的状态信息;所述状态信息包括车辆车速、方向盘转速和车辆阻尼系数;通过线控转向主动回正状态决策对所述状态信息进行决策处理,得到主动回正状态标志位;若所述主动回正状态标志位为开启主动回正,根据所述状态信息,确定主动回正力矩;根据所述车辆车速、所述方向盘转速和所述车辆阻尼系数,确定车辆阻尼力矩;根据所述主动回正力矩和所述车辆阻尼力矩,确定主动回正目标转矩;根据所述主动回正目标转矩对电机进行驱动控制,完成车辆转向。本技术实施例通过驾驶员和车辆的状态信息,确定主动回正状态标志位,进而确定是否开启主动回正控制过程。然后,本技术实施例通过状态信息,确定主动回正力矩;结合车辆阻尼系统,确定主动回正目标转矩;最后,通过主动回正目标转矩对电机进行驱动控制,完成车辆转向。本技术实施例通过驾驶员和车辆的状态信息,结合车辆阻尼系数,确定主动回正目标转矩,能够实现对车辆转向的精准控制,提升主动回正控制的准确度。
- 还没有人留言评论。精彩留言会获得点赞!