一种自适应差速器模组的制作方法
本技术涉及轮式移动机器人的驱动模组,具体的讲是一种自适应差速器模组。
背景技术:
1、运用于物流领域的轮式移动机器人包括agv(automated guided vehicle)和amr(automatic mobile robot),由于应用于物流领域,所以一方面需要大扭力的电机提供足够的驱动力,另一方面为了达到机器人的高精度控制和实现机器人的全向移动,所以多轮驱动成为最佳选择。受限于物流场景的地面条件,多轮驱动方案需要考虑悬挂等自适应功能。
2、目前市面上全向移动机器人解决方案主要以集成两个或多个舵轮为主,舵轮集行走、牵引和转向功能为一体,其优点是舵轮模块技术比较成熟且能满足较大负载需求,但是由于舵轮的轮子设计为套设于电机的外侧,这样会限制轮子的最小尺寸,以增加全向移动机器人的最小体积,使其无法适用于空间狭小的区域,很难满足小型化,轻量化的机器人设计需求。
技术实现思路
1、本实用新型要解决的技术问题是针对以上不足,提供一种自适应差速器模组,本实用新型拥有极小的回转空间和精细的角度控制,同时带有地面自适应能力。
2、为解决以上技术问题,本实用新型采用以下技术方案:
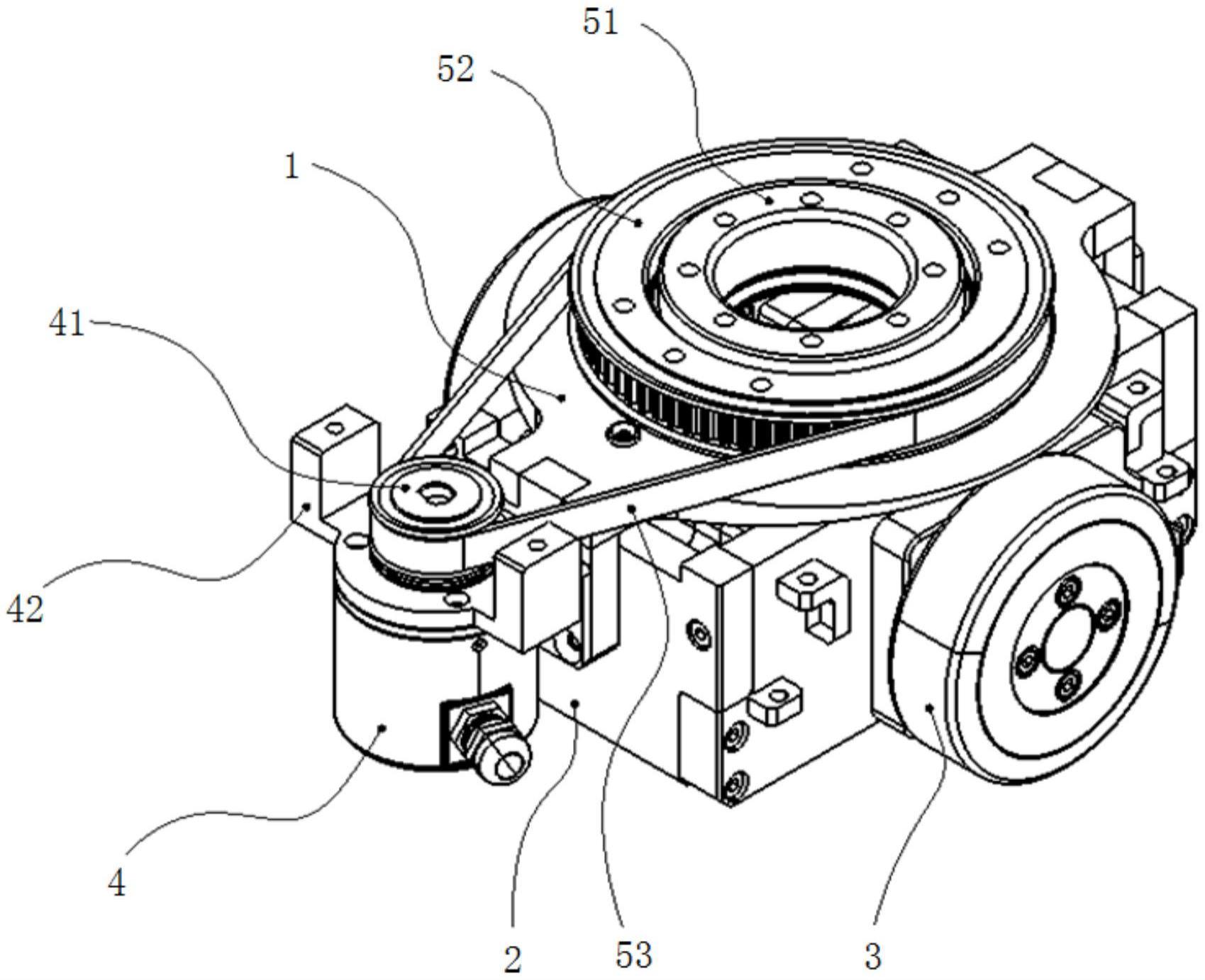
3、一种自适应差速器模组,包括悬挂支架、驱动轮安装支架、旋转编码器和两组驱动轮组,两组驱动轮组分别设置于驱动轮安装支架的左右两侧,所述驱动轮安装支架设置于悬挂支架底部,且驱动轮安装支架可绕悬挂支架在竖直平面旋转,以使两组驱动轮组左右摆动,所述旋转编码器设置于悬挂支架的正前方,且旋转编码器的输入端通过传动机构与悬挂支架连接,所述旋转编码器用于检测悬挂支架在水平面内的旋转角度。
4、进一步的,所述传动机构包括回转轴、回转同步轮和同步带,所述回转轴设置于安装平面的下方,所述回转同步轮固定于悬挂支架的顶部,且回转同步轮转动设置于回转轴的外侧,所述回转同步轮和回转轴同轴设置,所述旋转编码器的顶部输入端设置有编码器同步轮,所述编码器同步轮和回转同步轮通过同步带连接。
5、进一步的,所述回转轴和回转同步轮之间设置有回转轴承,所述回转同步轮通过回转轴承转动设置于回转轴的外侧。
6、进一步的,所述旋转编码器的顶部设置有编码器支架,所述旋转编码器通过编码器支架设置于安装平面的下方。
7、进一步的,所述悬挂支架的前后两端均设置有悬挂轴,所述悬挂轴水平设置且垂直于悬挂支架的前端面和后端面,所述驱动轮安装支架的前后两端通过悬挂轴铰接于悬挂支架上,驱动轮安装支架能绕悬挂轴在竖直平面内转动。
8、进一步的,所述驱动轮安装支架的前端和后端与每个悬挂轴的外侧之间均设置有滑动轴承。
9、进一步的,所述驱动轮组包括驱动轮、电机和减速器,所述电机设置于驱动轮安装支架的内侧,所述减速器设置于驱动轮安装支架的外侧,所述驱动轮竖直设置于减速器的输出端,所述电机的输出端与减速器的输入端连接,所述电机用于驱动减速器以带动驱动轮旋转。
10、本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
11、本实用新型的差速驱动模组配置了2台dc48v 400w电机,整体可提供最大600kg的驱动能力和最高0.8m/s的驱动速度,能够满足物流运输的需求,且整体安装高度仅106mm,能够满足小型化、轻量化的机器人设计要求;
12、本实用新型的差速驱动模组在行驶或者转动过程中,整个驱动轮安装支架可绕悬挂轴在竖直平面内旋转,以使两个驱动轮绕旋转轴做摆动,以使驱动轮始终能与底面保持良好的接触,保证有足够的正压力,提高驱动轮的抓地性能;
13、整个悬挂架在进行转动时,通过回转同步轮带动编码器同步轮一同转动,转动过程的角度通过同步带传动给编码器,通过编码器进行测量换算来得出转动角度,具体的,编码器转动角度与悬挂支架转动角度的比值即为回转同步轮与编码器同步轮的齿数比。
14、下面结合附图和实施例对本实用新型进行详细说明。
技术特征:
1.一种自适应差速器模组,其特征在于,包括悬挂支架(1)、驱动轮安装支架(2)、旋转编码器(4)和两组驱动轮组(3),两组驱动轮组(3)分别设置于驱动轮安装支架(2)的左右两侧,所述驱动轮安装支架(2)设置于悬挂支架(1)底部,且驱动轮安装支架(2)可绕悬挂支架(1)在竖直平面旋转,以使两组驱动轮组(3)左右摆动,所述旋转编码器(4)设置于悬挂支架(1)的正前方,且旋转编码器(4)的输入端通过传动机构与悬挂支架(1)连接,所述旋转编码器(4)用于检测悬挂支架(1)在水平面内的旋转角度。
2.根据权利要求1所述的自适应差速器模组,其特征在于,所述传动机构包括回转轴(51)、回转同步轮(52)和同步带(53),所述回转轴(51)设置于安装平面的下方,所述回转同步轮(52)固定于悬挂支架(1)的顶部,且回转同步轮(52)转动设置于回转轴(51)的外侧,所述回转同步轮(52)和回转轴(51)同轴设置,所述旋转编码器(4)的顶部输入端设置有编码器同步轮(41),所述编码器同步轮(41)和回转同步轮(52)通过同步带(53)连接。
3.根据权利要求2所述的自适应差速器模组,其特征在于,所述回转轴(51)和回转同步轮(52)之间设置有回转轴承(54),所述回转同步轮(52)通过回转轴承(54)转动设置于回转轴(51)的外侧。
4.根据权利要求2所述的自适应差速器模组,其特征在于,所述旋转编码器(4)的顶部设置有编码器支架(42),所述旋转编码器(4)通过编码器支架(42)设置于安装平面的下方。
5.根据权利要求1所述的自适应差速器模组,其特征在于,所述悬挂支架(1)的前后两端均设置有悬挂轴(11),所述悬挂轴(11)水平设置且垂直于悬挂支架(1)的前端面和后端面,所述驱动轮安装支架(2)的前后两端通过悬挂轴(11)铰接于悬挂支架(1)上,所述驱动轮安装支架(2)能绕悬挂轴(11)在竖直平面内转动。
6.根据权利要求5所述的自适应差速器模组,其特征在于,所述驱动轮安装支架(2)的前端和后端与每个悬挂轴(11)的外侧之间均设置有滑动轴承(21)。
7.根据权利要求1所述的自适应差速器模组,其特征在于,所述驱动轮组(3)包括驱动轮(31)、电机(32)和减速器(33),所述电机(32)设置于驱动轮安装支架(2)的内侧,所述减速器(33)设置于驱动轮安装支架(2)的外侧,所述驱动轮(31)竖直设置于减速器(33)的输出端,所述电机(32)的输出端与减速器(33)的输入端连接,所述电机(32)用于驱动减速器(33)以带动驱动轮(31)旋转。
技术总结
本技术涉及一种自适应差速器模组,包括悬挂支架、驱动轮安装支架、旋转编码器和两组驱动轮组,两组驱动轮组分别设置于驱动轮安装支架的左右两侧,所述驱动轮安装支架设置于悬挂支架底部,且驱动轮安装支架可绕悬挂支架在竖直平面旋转,以使两组驱动轮组左右摆动,所述旋转编码器设置于悬挂支架的正前方,且旋转编码器的输入端通过传动机构与悬挂支架连接,所述旋转编码器用于检测悬挂支架在水平面内的旋转角度。本技术拥有极小的回转空间和精细的角度控制,同时带有地面自适应能力。
技术研发人员:刘飞,李净,熊齐波,潘宗熠,罗斌
受保护的技术使用者:湖北九州云智科技有限公司
技术研发日:20230213
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!