一种磁吸履带及爬壁机器人
本技术涉及爬壁机器人,尤其涉及一种磁吸履带及爬壁机器人。
背景技术:
1、船舶及化工储罐等设备通常需要一爬壁机器人吸附在其表面行走,以对设备进行检查和清洁。
2、现有的爬壁机器人主要存在三种吸附方式,包括有负压吸附、抓扣吸附以及磁吸附,而磁吸附分为永磁吸附和电磁吸附两种。其中,永磁吸附是通过在履带上安装永磁体,利用永磁体的磁力将机器人吸附在工作表面;电磁吸附是在履带上安装电磁体,向电磁体通电后使电磁体具有磁性,进而使机器人吸附在工作表面。
3、然而,永磁吸附的磁力恒定不变,无法随不同工作表面进行改变,当行工作表面为曲面时,永磁吸附的磁力不足,无法使机器人稳固的吸附在工作表面;电磁吸附需要不断的向电磁体供电,导致机器人无法兼顾续航时间和自身重量;若电池过大则自身重量过大,就需要更大的吸附力;若电池过小则续航不足;若通过线缆供电,则限制了机器人的活动范围。
技术实现思路
1、针对现有技术的上述不足,本实用新型所要解决的技术问题在于,提出一种磁吸履带及爬壁机器人,用于解决现有技术中采用电磁吸附的爬壁机器人需要不断供电导致其无法兼顾自身重量和续航等问题。
2、本实用新型解决其技术问题采用的技术方案是一种磁吸履带,在所述履带表面安装有若干电永磁铁,每个所述电永磁铁均设有第一连接端子和第二连接端子;
3、还包括有处于所述履带侧向的充消磁单元,所述充消磁单元具有第一接触片和第二接触片;当任一所述电永磁铁运动至处于所述充消磁单元的侧向时,所述电永磁铁的第一连接端子与所述第一接触片接触,第二连接端子与所述第二接触片接触,所述充消磁单元向所述电永磁铁通入正向或反向电流,以对所述电永磁铁充磁或消磁。
4、进一步地,所述第一接触片到所述第二接触片的距离由其中部向两端方向逐渐增大。
5、进一步地,所述第一接触片和所述第二接触片均呈拱形设置,且所述第一接触片与所述第二接触片相对设置。
6、进一步地,所述第一连接端子与所述第二连接端子均呈圆柱状设置。
7、进一步地,还包括一安装架,所述安装架具有第一安装板和第二安装板,且所述第二安装板处于所述第一安装板的上方;
8、所述第一接触片安装在所述第一安装板的上表面,所述第二接触片安装在所述第二安装板的下表面。
9、进一步地,所述履带具有与工作面接触的下半区,以及处于所述下半区上方的上半区;
10、在所述履带的前端和后端分别设有一个所述充消磁单元,所述电永磁铁由所述上半区向所述下半区运动时,所述充消磁单元对所述电永磁铁充磁;所述电永磁铁由所述下半区向所述上半区运动时,所述充消磁单元对所述电永磁铁消磁。
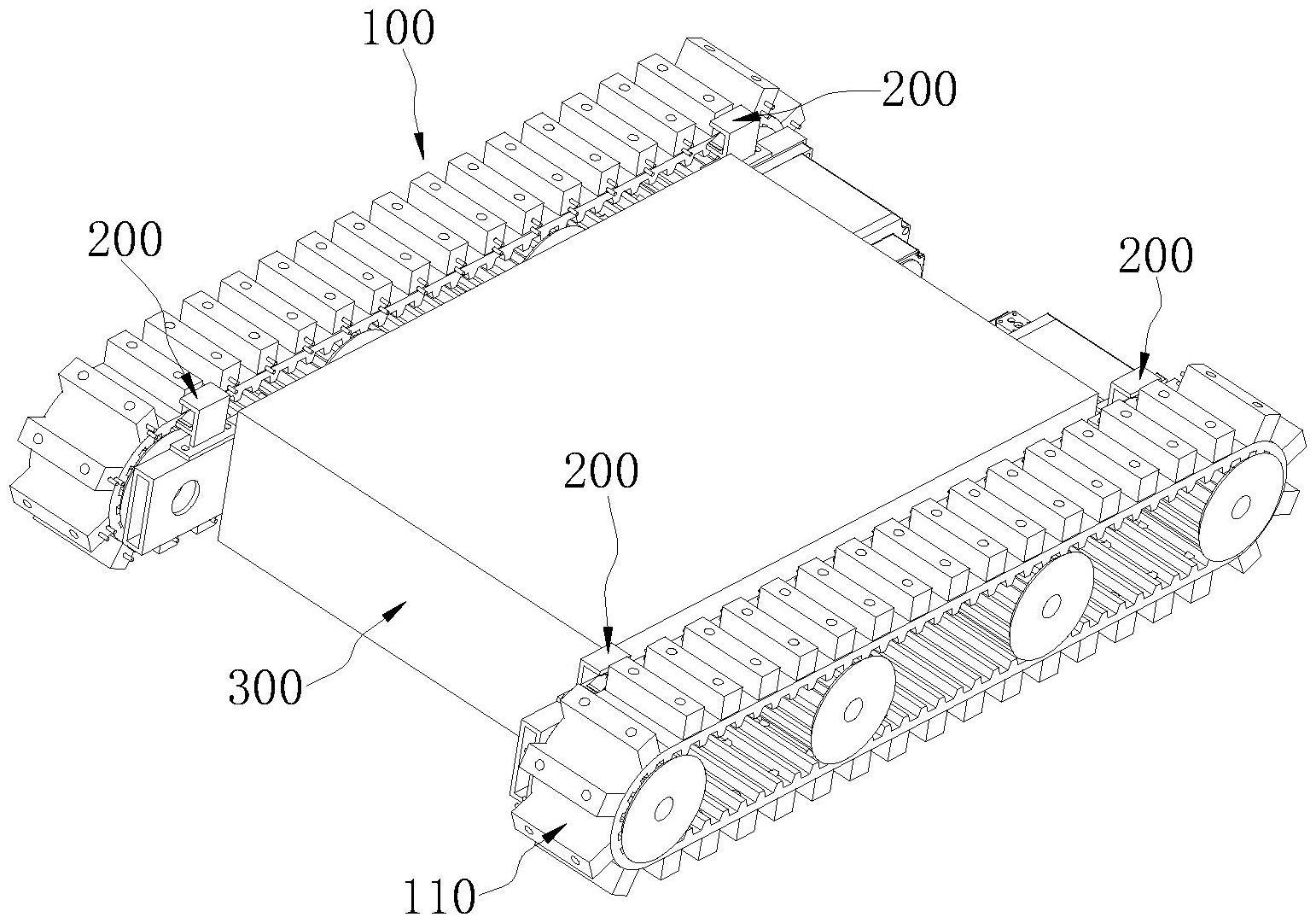
11、进一步地,还公开了一种爬壁机器人,包括两个所述的一种磁吸履带,还包括底盘车架,两个所述履带分别设置在所述底盘车架的两侧。
12、进一步地,还包括四个用于安装所述第一接触片和所述第二接触片的安装架,所述安装架与所述底盘车架固接。
13、与现有技术相比,本实用新型至少具有以下有益效果:
14、(1)在履带的表面安装多个电永磁铁,在履带的侧向设置充消磁单元,当电永磁铁运动至充消磁单元处时,电永磁铁上的第一连接端子与充消磁单元上第一接触片接触,第二连接端子与第二接触片接触,进而充消磁单元与电永磁铁形成电回路,充消磁单元对电永磁铁进行充磁或消磁,使履带能够吸附在工作表面上。电永磁铁只有在充磁和消磁的0.1-1秒内使用电能,之后不需要电力的维持,便能够使其具有磁性并吸附在工作表面,较电磁铁能够节省95%的电能,在相同的电池容量的情况下,大幅度的增强了续航时间。
15、(2)在消磁之后,通过改变再次对其进行充磁时的电流大小,即可改变电永磁铁的磁力大小,解决了永磁铁的磁力无法调节的问题。
技术特征:
1.一种磁吸履带,其特征在于,在所述履带表面安装有若干电永磁铁,每个所述电永磁铁均设有第一连接端子和第二连接端子;
2.根据权利要求1所述的一种磁吸履带,其特征在于,所述第一接触片到所述第二接触片的距离由其中部向两端方向逐渐增大。
3.根据权利要求2所述的一种磁吸履带,其特征在于,所述第一接触片和所述第二接触片均呈拱形设置,且所述第一接触片与所述第二接触片相对设置。
4.根据权利要求1所述的一种磁吸履带,其特征在于,所述第一连接端子与所述第二连接端子均呈圆柱状设置。
5.根据权利要求1所述的一种磁吸履带,其特征在于,还包括一安装架,所述安装架具有第一安装板和第二安装板,且所述第二安装板处于所述第一安装板的上方;
6.根据权利要求1所述的一种磁吸履带,其特征在于,所述履带具有与工作面接触的下半区,以及处于所述下半区上方的上半区;
7.一种爬壁机器人,其特征在于,包括两个如权利要求1-6中任一项所述的一种磁吸履带,还包括底盘车架,两个所述履带分别设置在所述底盘车架的两侧。
8.根据权利要求7所述的一种爬壁机器人,其特征在于,还包括四个用于安装所述第一接触片和所述第二接触片的安装架,所述安装架与所述底盘车架固接。
技术总结
本技术公开了一种磁吸履带及爬壁机器人,在所述履带表面安装有若干电永磁铁,每个所述电永磁铁均设有第一连接端子和第二连接端子;还包括有处于所述履带侧向的充消磁单元,所述充消磁单元具有第一接触片和第二接触片;当任一所述电永磁铁运动至处于所述充消磁单元的侧向时,所述电永磁铁的第一连接端子与所述第一接触片接触,第二连接端子与所述第二接触片接触,所述充消磁单元向所述电永磁铁通入正向或反向电流,以对所述电永磁铁充磁或消磁。本技术中,在履带的表面安装多个电永磁铁,在履带的侧向设置充消磁单元,电永磁铁只有在充磁和消磁的0.1‑1秒内使用电能,之后不需要电力的维持,大幅度的增强了续航时间。
技术研发人员:茹浩磊,苏阔,肖江剑,许根,屠黎俊,黄伟成,吴贤渠
受保护的技术使用者:中国科学院宁波材料技术与工程研究所
技术研发日:20230301
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!