一种机器人底盘转向及减震装置的制作方法
本技术涉及机器人,特别是一种机器人底盘转向及减震装置。
背景技术:
1、现有的机器人底盘通过设置轮毂电机来驱动车轮,通过设置转向电机来负责车轮转向,通过设置减震器来吸收地面障碍撞击带来的冲击。
2、例如cn 110789331a公开了一种机器人伺服舵轮,它包括驱动轮模块和转向模块;驱动轮模块包括轮体、驱动电机和减震支架,驱动电机通过减震支架与驱动轮相连;转向模块包括转向电机、减速机构和转轴,转向电机的输出轴与减速机构的输入端相连,减速机构的输出端与转轴相连,转轴的另一端与减震支架相连;驱动电机驱动轮体转动;转向电机输出动力经减速机构减速后传递至转轴带动减震支架转向。然而该转向及减震装置的结构不紧凑,一方面,一个车轮需要设置两个减震支架和对应的两个减震器,不仅增加了减震器的数量,还提高了成本;另一方面,减震器和减速机是分开设置的,导致结构不紧凑,而且各种零散的支架设置数量增加。
技术实现思路
1、本实用新型的目的是克服现有技术的上述不足而提供一种机器人底盘转向及减震装置。
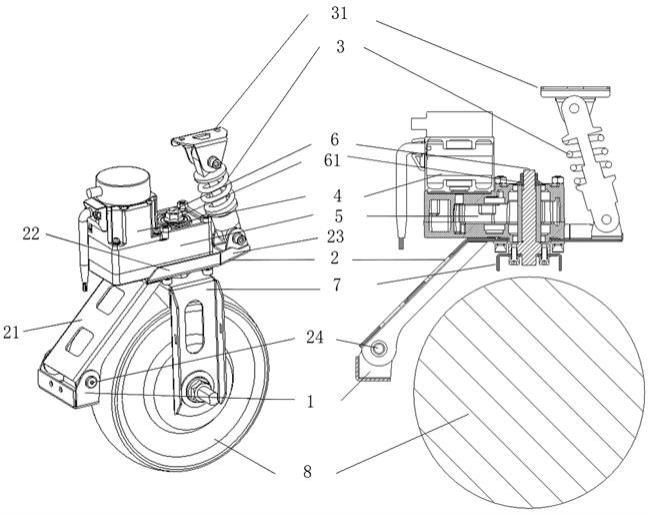
2、本实用新型的技术方案是:一种机器人底盘转向及减震装置,包括减震组件和转向组件;所述减震组件包括摆臂支座、摆臂和减震器;所述转向组件包括转向电机、减速机和转向轴;所述摆臂经摆臂支座连接机器人的机身,摆臂能够绕摆臂支座转动;所述摆臂的水平面上设有所述减速机和减震器,所述减速机连接转向电机的输出端,所述转向轴安装于减速机的输出孔中,转向轴的下端连接轮毂电机支架,轮毂电机固定于轮毂电机支架上。
3、进一步,所述摆臂包括倾斜板、水平板和延伸板,水平板的一端与倾斜板之间呈钝角设置,另一端连接延伸板。
4、进一步,所述倾斜板在远离水平板的那一端通过摆臂销与摆臂支座连接。
5、进一步,所述水平板通过螺纹组件与所述轮毂电机支架固定连接
6、进一步,所述水平板为槽结构,水平板的至少两个侧边向远离轮毂电机支架的方向折弯;槽体内安装所述减速机,减速机的上方一侧连接转向电机,另一侧连接转向轴。
7、进一步,所述减震器倾斜安装于延伸板上。
8、进一步,所述减震器的两端分别与摆臂以及减震器支架用销连接,减震器支架与机器人的机身固定连接。
9、进一步,所述转向电机能够带动轮胎360度旋转,机器人底盘的每个轮胎分别由各转向电机独立控制。
10、进一步,所述转向轴通过转向轴螺母安装在减速机的输出孔中。
11、本实用新型的有益效果:本实用新型的转向及减震装置主要应用于轮式机器人底盘,具有结构紧凑,机动灵活的特点。通过对摆臂结构的设计,能够在摆臂上同时减速机、转向电机、转向轴以及减震器,不仅整体结构紧凑,安装方便,易于加工制造,而且简化了结构,减少零部件;通过在减速机上连接转向电机,并使转向轴安装在减速机的输出孔中,能够使转向电机通过减速机将扭力传递给转向轴,不仅提高了控制精度和扭矩,而且提高了整车的灵活性;通过设置摆臂绕摆臂销转动,并在摆臂上设置减震器,能够有效减小机器人行驶过程中的冲击,吸收了振动能量,从而提高机器人行驶的稳定性。可以说本实用新型结构简单紧凑、控制模式多样,精度高,机动灵活,能够符合多变的使用场景和路面条件。
技术特征:
1.一种机器人底盘转向及减震装置,包括减震组件和转向组件;所述减震组件包括摆臂支座、摆臂和减震器;所述转向组件包括转向电机、减速机和转向轴;其特征在于,所述摆臂经摆臂支座连接机器人的机身,摆臂能够绕摆臂支座转动;所述摆臂的水平面上设有所述减速机和减震器,所述减速机连接转向电机的输出端,所述转向轴安装于减速机的输出孔中,转向轴的下端连接轮毂电机支架,轮毂电机固定于轮毂电机支架上。
2.根据权利要求1所述的机器人底盘转向及减震装置,其特征在于,所述摆臂包括倾斜板、水平板和延伸板,水平板的一端与倾斜板之间呈钝角设置,另一端连接延伸板。
3.根据权利要求2所述的机器人底盘转向及减震装置,其特征在于,所述倾斜板在远离水平板的那一端通过摆臂销与摆臂支座连接。
4.根据权利要求2所述的机器人底盘转向及减震装置,其特征在于,所述水平板通过螺纹组件与所述轮毂电机支架固定连接。
5.根据权利要求2所述的机器人底盘转向及减震装置,其特征在于,所述水平板为槽结构,水平板的至少两个侧边向远离轮毂电机支架的方向折弯;槽体内安装所述减速机,减速机的上方一侧连接转向电机,另一侧连接转向轴。
6.根据权利要求2所述的机器人底盘转向及减震装置,其特征在于,所述减震器倾斜安装于延伸板上。
7.根据权利要求1所述的机器人底盘转向及减震装置,其特征在于,所述减震器的两端分别与摆臂以及减震器支架用销连接,减震器支架与机器人的机身固定连接。
8.根据权利要求1所述的机器人底盘转向及减震装置,其特征在于,所述转向电机能够带动轮胎360度旋转,机器人底盘的每个轮胎分别由各转向电机独立控制。
9.根据权利要求1所述的机器人底盘转向及减震装置,其特征在于,所述转向轴通过转向轴螺母安装在减速机的输出孔中。
技术总结
一种机器人底盘转向及减震装置,包括减震组件和转向组件;所述减震组件包括摆臂支座、摆臂和减震器;所述转向组件包括转向电机、减速机和转向轴;所述摆臂经摆臂支座连接机器人的机身,摆臂能够绕摆臂支座转动;所述摆臂的水平面上设有所述减速机和减震器,所述减速机连接转向电机的输出端,所述转向轴安装于减速机的输出孔中,转向轴的下端连接轮毂电机支架,轮毂电机固定于轮毂电机支架上。本技术能够在摆臂上同时减速机、转向电机、转向轴以及减震器,不仅整体结构紧凑,安装方便,易于加工制造,而且简化了结构,减少零部件。
技术研发人员:李金波,周剑
受保护的技术使用者:长沙万为机器人有限公司
技术研发日:20230421
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!