机器人下肢组件、人形机器人和四足机器人的制作方法
本申请涉及机器人,例如涉及一种机器人下肢组件、人形机器人和四足机器人。
背景技术:
1、随着机器人的快速发展,机器人的应用领域也越来越广泛,如服务型机器人、医疗机器人以及工业机器人等。机器人所需的功能越来越多,而机器人首先要满足的功能就是自身的运动,如何实现机器人的正常行走,是一个重要的研究方向。
2、目前为了提高机器人下肢的质心高度,减少机器人在行走时的转动惯量,一般采用将机器人腿部结构中的执行器位置提高的方法,例如相关技术中公开一种轮足式机器人,其包括电机模组、肘关节、大腿和小腿,电机模组设于大腿,电机模组包括小腿电机、同步轮座、小同步轮和同步带;小同步轮通过同步轮座与小腿电机的内转子连接,同步带连接安装在电机模组的小同步轮和肘关节上的大同步轮,小腿电机的内转子相对于外转子独立运动时,小同步轮跟随小腿电机内转子转动,小同步轮将转动传递给肘关节上的大同步轮,以带动小腿运动。
3、在实现本公开实施例的过程中,发现相关技术中至少存在如下问题:
4、小腿电机通过小同步带轮、大同步带轮和同步带正向或反向运动带动肘关节运动,从而带动小腿相对于大腿运动,但是当小腿电机向一个方向转动、同步带传动时,同步带只能通过一侧向肘关节(也就是本实施例中的膝关节)提供驱动力,当受力过载时容易发生打滑,降低机器人运动的稳定性。
5、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本申请的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、本公开实施例提供一种机器人下肢组件、人形机器人和四足机器人,提高机器人下肢组件的运动稳定性。
3、根据本申请第一个方面的实施例,提供了一种机器人下肢组件,包括:大腿组件,设有中空内腔;膝关节执行器,设于所述大腿组件的上部;小腿组件,所述小腿组件的上端与所述大腿组件的下端相连接;双连杆组件,设于所述中空内腔内,所述双连杆组件的第一端与所述膝关节执行器的驱动端相连接,所述双连杆组件的第二端与所述小腿组件的上端相连接,以带动所述小腿组件相对于所述大腿组件摆动。
4、在一些可选实施例中,所述机器人下肢组件还包括:髋关节执行器,所述髋关节执行器的输出端与所述大腿组件的上端相连接,以带动所述大腿组件摆动,所述髋关节执行器与所述膝关节执行器分别设于所述大腿组件相对的两侧。
5、在一些可选实施例中,所述大腿组件包括:大腿外侧件,所述髋关节执行器的驱动端与所述大腿外侧件相连接;大腿内侧件,与所述大腿外侧件相连接,且与所述大腿外侧件共同围合出所述中空内腔,所述膝关节执行器设于所述大腿内侧件。
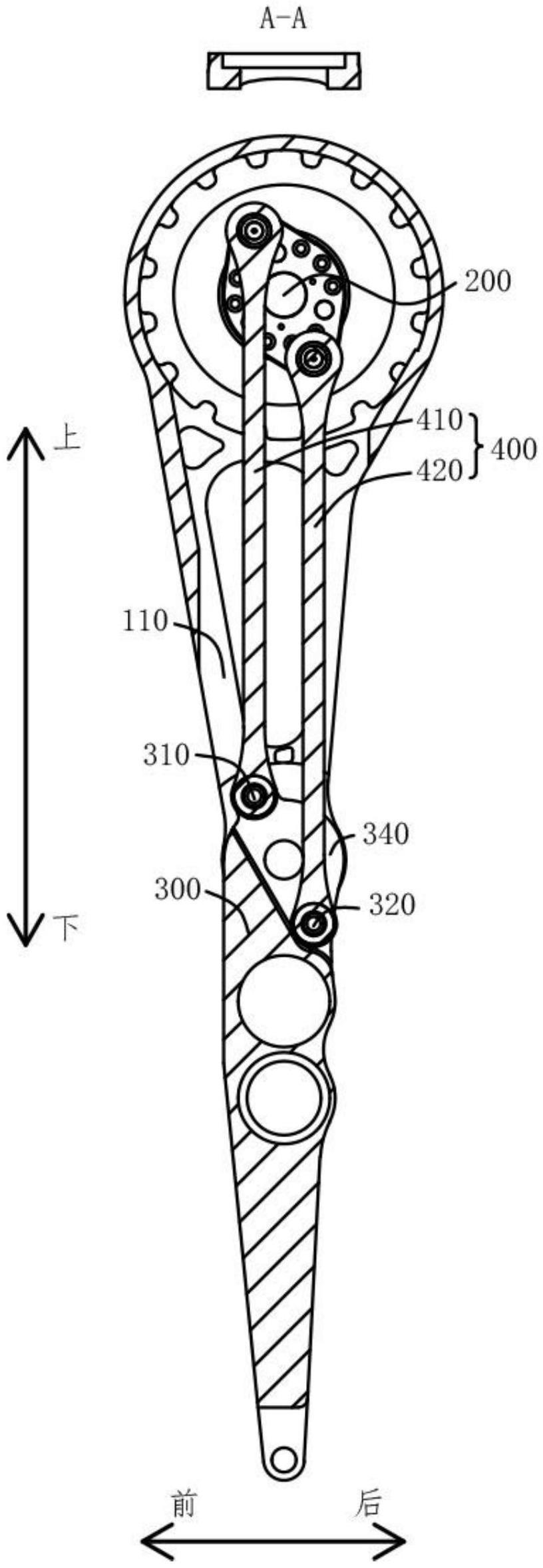
6、在一些可选实施例中,所述双连杆组件包括第一连杆和第二连杆,所述第一连杆的第一端与所述第二连杆的第一端分别设于所述膝关节执行器的驱动端的轴线的两侧,所述第一连杆的第二端与所述第二连杆的第二端均与所述小腿组件的上端连接;所述膝关节执行器的驱动端转动,沿所述第一连杆与所述第二连杆的长度方向,所述第一连杆与所述第二连杆反向运动,以使所述第一连杆向所述小腿组件提供压力,且所述第二连杆向所述小腿组件提供拉力,或使所述第一连杆向所述小腿组件提供拉力,且所述第二连杆向所述小腿组件提供压力。
7、在一些可选实施例中,所述小腿组件的上端设有第一连接位和第二连接位,所述第一连接位与所述第一连杆的第二端相连接,所述第二连接位与所述第二连杆的第二端相连接,以使所述小腿组件以所述第一连接位与所述第二连接位的连线的中点为中心转动。
8、在一些可选实施例中,所述机器人下肢组件在直立状态下,所述第一连接位位于所述第二连接位前侧,且所述第一连接位的高度高于所述第二连接位的高度。
9、在一些可选实施例中,所述大腿组件的下端设有第一连接槽,所述小腿组件的上端凸设有凸起部,所述凸起部位于所述第一连接槽内,所述凸起部设有第二连接槽,所述第二连接槽的侧壁设有所述第一连接位与所述第二连接位,所述第一连杆的第二端与所述第二连杆的第二端均位于所述第二连接槽内。
10、在一些可选实施例中,沿从上到下的方向,所述大腿组件的横截面积逐渐减小。
11、根据本申请第二个方面的实施例,提供了一种人形机器人,包括如上述任一项所述的机器人下肢组件。
12、在一些可选实施例中,所述人形机器人还包括:机器人上肢组件;机器人躯干组件,所述机器人上肢组件设于所述机器人躯干组件,所述机器人躯干组件的下端与所述机器人下肢组件相连接,所述机器人上肢组件和所述机器人躯干组件的重量能够通过双连杆组件传递至小腿组件,所述双连杆组件能够承受所述机器人上肢组件、所述机器人躯干组件、大腿组件和膝关节执行器的压力。
13、根据本申请第三个方面的实施例,提供了一种四足机器人,包括如上述任一项所述的机器人下肢组件。
14、本公开实施例提供的机器人下肢组件、人形机器人和四足机器人,可以实现以下技术效果:
15、膝关节执行器设于大腿组件的上端,双连杆组件的第一端与膝关节执行器的驱动端连接,双连杆组件的第二端与小腿组件连接,这样能够提高膝关节执行器的设置高度,从而提高机器人下肢的质心高度,减少机器人下肢的转动惯量,便于控制机器人下肢的运动。膝关节执行器通过双连杆组件带动小腿组件相对于大腿组件摆动,这样双连杆组件中的两个连杆均能够传递膝关节执行器的驱动力,双连杆组件的承载能力增加,从而提高对小腿组件的驱动力,以保证小腿组件相对于大腿组件的摆动角度,提高小腿组件的运行稳定性及可靠性,从而提高机器人下肢组件的运行稳定性。
16、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本申请。
技术特征:
1.一种机器人下肢组件,其特征在于,包括:
2.根据权利要求1所述的机器人下肢组件,其特征在于,还包括:
3.根据权利要求2所述的机器人下肢组件,其特征在于,所述大腿组件包括:
4.根据权利要求1所述的机器人下肢组件,其特征在于,
5.根据权利要求4所述的机器人下肢组件,其特征在于,
6.根据权利要求5所述的机器人下肢组件,其特征在于,
7.根据权利要求5所述的机器人下肢组件,其特征在于,
8.根据权利要求1所述的机器人下肢组件,其特征在于,
9.一种人形机器人,其特征在于,包括:
10.根据权利要求9所述的人形机器人,其特征在于,还包括:
11.一种四足机器人,其特征在于,包括:
技术总结
本申请涉及机器人技术领域,公开一种机器人下肢组件、人形机器人和四足机器人,机器人下肢组件包括:大腿组件,设有中空内腔;膝关节执行器,设于大腿组件的上部;小腿组件,小腿组件的上端与大腿组件的下端相连接;双连杆组件,设于中空内腔内,双连杆组件的第一端与膝关节执行器的驱动端相连接,双连杆组件的第二端与小腿组件的上端相连接,以带动小腿组件相对于大腿组件摆动。本实施例中双连杆组件的两个连杆均能够传递膝关节执行器的驱动力,双连杆组件的承载能力增加,从而提高对小腿组件的驱动力,以保证小腿组件相对于大腿组件的摆动角度,提高小腿组件的运行稳定性及可靠性,从而提高机器人下肢组件的运行稳定性。
技术研发人员:顾捷
受保护的技术使用者:上海傅利叶智能科技有限公司
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!