人形机器人及其脚板组件的制作方法
本技术涉及机器人设备,特别涉及一种人形机器人及其脚板组件。
背景技术:
1、人形机器人行走时,足底与地面接触,容易产生震动,进而导致人形机器人的下肢晃动,使得人形机器人在行走过程中的平稳性不高。
技术实现思路
1、有鉴于此,本实用新型提供了一种脚板组件,以提高人形机器人在移动过程中的平稳性。本实用新型还提供了一种具有上述脚板组件的人形机器人。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种脚板组件,用于人形机器人的脚部,包括:
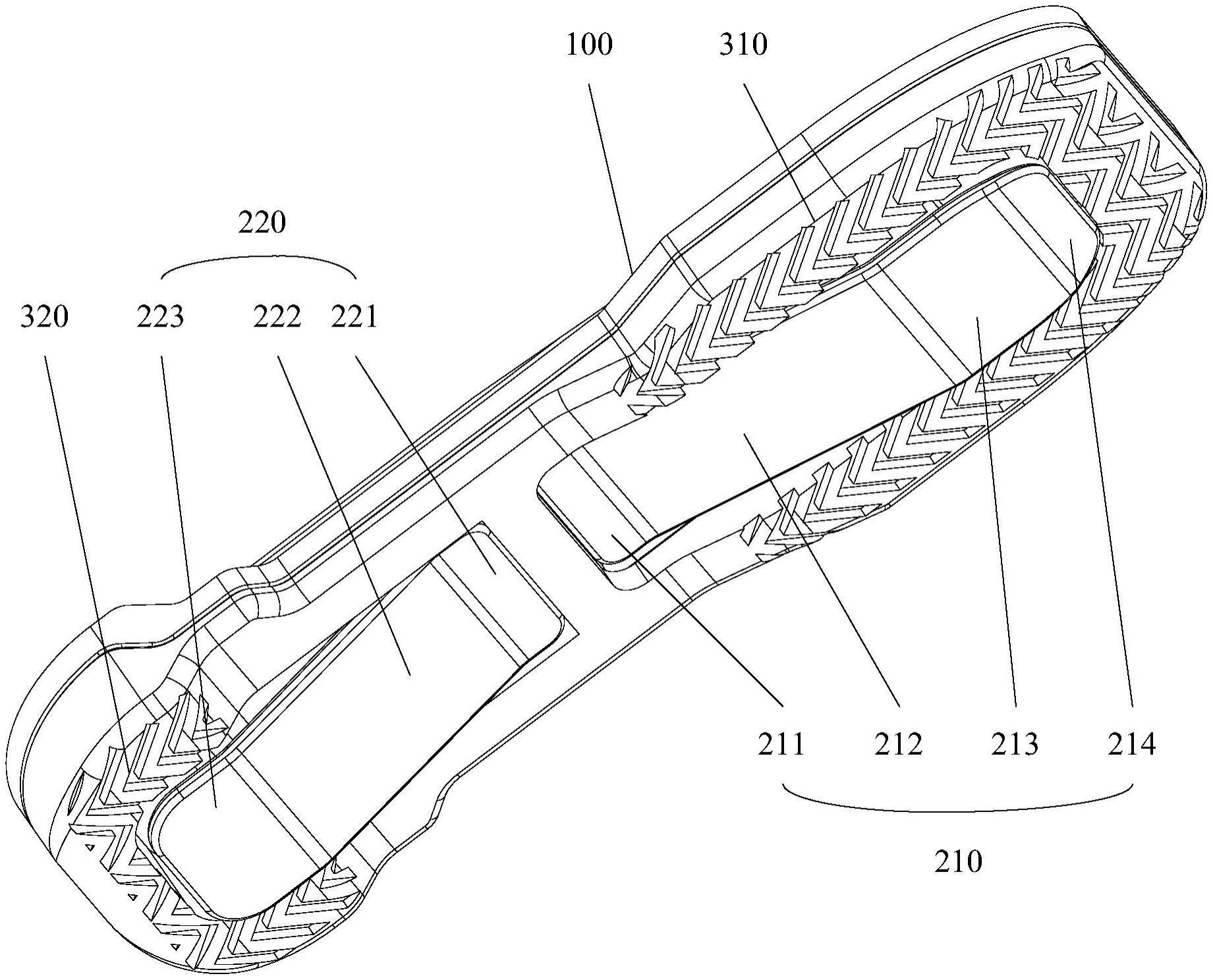
4、脚板,所述脚板具有第一面,所述第一面用于与支撑所述人形机器人的支撑面接触,所述第一面沿第一方向分为脚尖区域、中间区域及脚跟区域,所述第一方向为所述脚板的脚尖到所述脚板的脚跟的方向;
5、弹性部件,所述弹性部件设置于所述第一面;
6、其中,
7、所述弹性部件位于所述脚尖区域到所述中间区域,沿所述中间区域到所述脚尖区域的方向,所述弹性部件的弹性形变量增大;
8、和/或,所述弹性部件位于所述中间区域与所述脚跟区域,所述沿所述中间区域到所述脚跟区域的方向,所述弹性部件的弹性形变量增大。
9、可选地,上述脚板组件中,所述弹性部件为板状结构,所述弹性部件的第一端与所述中间区域固定连接,所述弹性部件的第二端为自由端;
10、沿所述弹性部件的第一端到所述弹性部件的第二端的方向,所述弹性部件与所述第一面之间的间隙增大。
11、可选地,上述脚板组件中,所述弹性部件的数量为两个且分别为第一弹性部件及第二弹性部件;
12、所述第一弹性部件的第一端与所述中间区域连接,所述第一弹性部件的第二端与所述脚尖区域对应;
13、所述第二弹性部件的第一端与所述中间区域连接,所述第二弹性部件的第二端与所述脚跟区域对应。
14、可选地,上述脚板组件中,所述第一弹性部件的第一端通过多个第一连接部与所述中间区域连接,多个所述第一连接部沿第二方向排列,所述第二方向与所述第一方向相互垂直;
15、和/或,所述第二弹性部件的第一端通过多个第二连接部与所述中间区域连接,多个所述第二连接部沿第二方向排列,所述第二方向与所述第一方向相互垂直。
16、可选地,上述脚板组件中,所述弹性部件包括第一板及第二板,所述第一板及所述第二板沿所述弹性部件的第一端到所述弹性部件的第二端的方向排列;
17、所述第一板与所述第一面的夹角大于所述第二板与所述第一面的夹角。
18、可选地,上述脚板组件中,所述脚板组件还包括设置于所述脚尖区域的第一弹性块及设置于所述脚跟区域的第二弹性块;
19、所述弹性部件位于第一弹性块与第二弹性块之间。
20、可选地,上述脚板组件中,所述第一弹性块向所述第一面的投影位于所述弹性部件向所述第一面的投影外侧;
21、和/或,所述第二弹性块向所述第一面的投影位于所述弹性部件向所述第一面的投影外侧。
22、可选地,上述脚板组件中,所述第一弹性块的外边缘与所述脚板的脚尖边缘对齐;
23、和/或,所述第二弹性块的外边缘与所述脚板的脚跟边缘对齐。
24、可选地,上述脚板组件中,所述弹性部件的第一区域与所述第一弹性块的第二区域沿第二方向对齐;所述第一区域沿远离所述第一面的方向凸出于所述第二区域,所述第二方向与所述第一方向相互垂直;
25、和/或,所述弹性部件的第三区域与所述第二弹性块的第四区域沿第二方向对齐;所述第三区域沿远离所述第一面的方向凸出于所述第四区域,所述第二方向与所述第一方向相互垂直。
26、本实用新型还提供了一种人形机器人,包括机器人主体及脚板组件,其特征在于,所述脚板组件为如上述任一项所述的脚板组件。
27、从上述的技术方案可以看出,本实用新型提供的脚板组件,当人形机器人移动(行走、跑步或跳跃等)过程中,在脚板组件与支撑面(地面或支撑人形机器人移动的其他面)接触时,脚尖区域或脚跟区域先接触支撑面。在脚板组件向支撑面下落的过程中,脚板与支撑面之间角度的调整,进而使得弹性部件位于不同区域的部分产生不同的弹性形变,以便于使得弹性部件能够实现对于脚板循序渐进的缓冲,并确保弹性部件能够实现弹性形变以便于储存能量;在脚板组件由支撑面抬起的过程中,脚板与支撑面之间角度的调整,进而使得弹性部件位于不同区域的部分能够在弹性恢复力作用下产生不同形变,以便于确保弹性部件能够实现循序渐进的释放能量。即,通过弹性部件依据人形机器人移动的具体动作产生的相应弹性形变,起到了对脚板循序渐进的缓冲,有效起到了减震作用,进而降低了人形机器人(下肢)晃动的程度,提高了人形机器人在移动过程中的平稳性。
28、本实用新型还提供了一种人形机器人,包括机器人主体及脚板组件,脚板组件为如上述任一种脚板组件。由于上述脚板组件具有上述技术效果,具有上述脚板组件的人形机器人也应具有同样地技术效果,在此不在一一累述。
技术特征:
1.一种脚板组件,用于人形机器人的脚部,其特征在于,包括:
2.如权利要求1所述的脚板组件,其特征在于,所述弹性部件为板状结构,所述弹性部件的第一端与所述中间区域固定连接,所述弹性部件的第二端为自由端;
3.如权利要求2所述的脚板组件,其特征在于,所述弹性部件的数量为两个且分别为第一弹性部件及第二弹性部件;
4.如权利要求3所述的脚板组件,其特征在于,所述第一弹性部件的第一端通过多个第一连接部与所述中间区域连接,多个所述第一连接部沿第二方向排列,所述第二方向与所述第一方向相互垂直;
5.如权利要求2、3或4所述的脚板组件,其特征在于,所述弹性部件包括第一板及第二板,所述第一板及所述第二板沿所述弹性部件的第一端到所述弹性部件的第二端的方向排列;
6.如权利要求1所述的脚板组件,其特征在于,所述脚板组件还包括设置于所述脚尖区域的第一弹性块及设置于所述脚跟区域的第二弹性块;
7.如权利要求6所述的脚板组件,其特征在于,所述第一弹性块向所述第一面的投影位于所述弹性部件向所述第一面的投影外侧;
8.如权利要求6所述的脚板组件,其特征在于,所述第一弹性块的外边缘与所述脚板的脚尖边缘对齐;
9.如权利要求6、7或8所述的脚板组件,其特征在于,所述弹性部件的第一区域与所述第一弹性块的第二区域沿第二方向对齐;所述第一区域沿远离所述第一面的方向凸出于所述第二区域,所述第二方向与所述第一方向相互垂直;
10.一种人形机器人,包括机器人主体及脚板组件,其特征在于,所述脚板组件为如权利要求1-9任一项所述的脚板组件。
技术总结
本技术公开了一种人形机器人及其脚板组件,脚板组件用于人形机器人的脚部,包括:脚板,所述脚板具有第一面,所述第一面用于与支撑所述人形机器人的支撑面接触,所述第一面沿第一方向分为脚尖区域、中间区域及脚跟区域,所述第一方向为所述脚板的脚尖到所述脚板的脚跟的方向;弹性部件,所述弹性部件设置于所述第一面;其中,所述弹性部件位于所述脚尖区域到所述中间区域,沿所述中间区域到所述脚尖区域的方向,所述弹性部件的弹性形变量增大;和/或,所述弹性部件位于所述中间区域与所述脚跟区域,所述沿所述中间区域到所述脚跟区域的方向,所述弹性部件的弹性形变量增大。上述脚板组件,提高了人形机器人在移动过程中的平稳性。
技术研发人员:顾捷
受保护的技术使用者:上海傅利叶智能科技有限公司
技术研发日:20230524
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!