一种除草机器人用履带底盘
本技术涉及履带底盘领域,尤其涉及一种除草机器人用履带底盘。
背景技术:
1、除杂草机器人,一般可以通过杂草识别视觉导航实现定靶喷药,精准去除杂草,以减少不必要的农药浪费和污染。除草机器人可以减少大面积喷洒农药,这样不仅不会造成农药的浪费,而且也不会导致农作物上和土壤中有大量的农药残留。
2、除草机器人需要在由于需要在田地里运行,因此通常采用履带底盘从而获得更好的越野能力。例如申请号为201920219819.5的专利文件公开了一种关节履带式果园除草机器人,包括滑轨、槽型底板、电动推杆、除草电机、刀盘。除草电机悬挂固定在槽型底板上,刀盘受除草电机转轴驱动,电机两侧对称布置电动推杆,电动推杆底面安装在车体底盘上,电动推杆的活动端与槽型底板通过支架过渡连接,支架接受电动推杆推动,使槽型底板升降运动,滑轨安装在车体框架内侧,通过改变电动推杆的开度改变除草机构工作高度。使关节履带式果园除草机器人,能够适应果园复杂的地形,具有一定的越障和刀具保护机制。
3、但是果园内的土地不会经常翻动,对于除草机器人的移动影响较小,在玉米大田作物环境下,除草机器人的底盘较低容易产生托底现象,但是现有的履带底盘通常不能调节底盘离地高度。因此,如何开发一种新型除草机器人用履带底盘成为本领域内技术人员亟待解决的问题。
技术实现思路
1、本实用新型的目的是提供一种除草机器人用履带底盘,解决在玉米大田作物环境下,除草机器人的底盘交底容易产生托底现象,但是现有的履带底盘通常不能调节底盘离地高度的问题。
2、为解决上述技术问题,本实用新型采用如下技术方案:
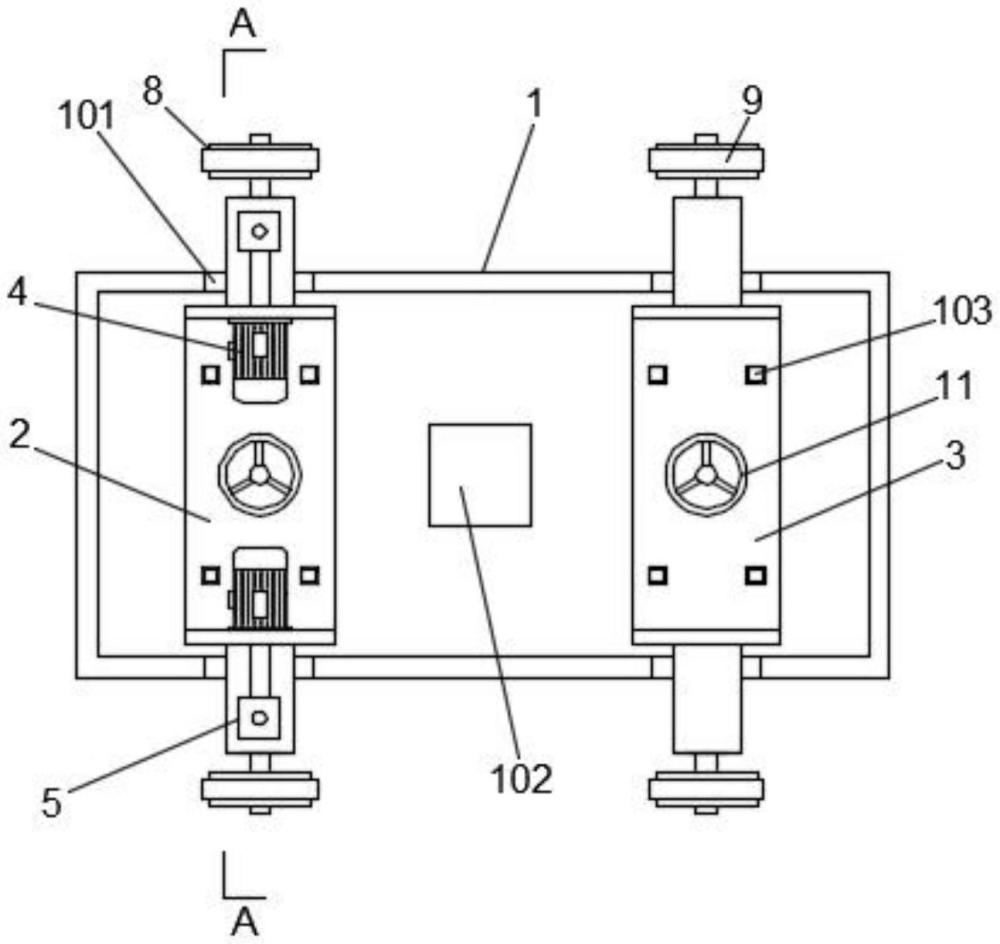
3、本实用新型一种除草机器人用履带底盘,包括底盘本体、第一升降架和第二升降架,所述底盘本体的侧壁上开设有与所述第一升降架和第二升降架配合的缺口,所述底盘本体内焊接有导向柱,所述第一升降架和第二升降架均可上下滑动的设置在所述导向柱上,所述底盘本体内通过旋转底座设置可转动的设置有丝杠,所述丝杠与所述第一升降架和第二升降架之间螺纹配合,所述丝杠的顶端设置有手轮;所述第一升降架上设置有第一履带轮,所述第二升降架上设置有第二履带轮,所述第一履带轮和第二履带轮之间通过橡胶履带连接。
4、进一步的,第一升降架和第二升降架的结构相同。
5、进一步的,所述第一升降架包括横板、立板和l型延伸板,两块所述立板焊接在所述横板的上表面上,两个所述l型延伸板焊接在所述横板的下表面上。
6、进一步的,所述第一升降架的立板的内侧设置有驱动电机,所述驱动电机的输出轴穿过所述立板后与第一传动箱连接,所述第一传动箱的下端通过传动轴与l型延伸板上的第二传动箱连接,所述第二传动箱的输出轴上设置第一履带轮。
7、进一步的,所述第二升降架的l型延伸板上设置有第二履带轮。
8、进一步的,所述底盘本体的中间位置设置用于安装除草装置的通孔。
9、进一步的,所述底盘本体的左端设置有蓄电池,所述底盘本体的右端设置有控制箱。
10、与现有技术相比,本实用新型的有益技术效果:
11、本实用新型除草机器人用履带底盘的履带驱动结构均设置在升降架上,因此底盘本体能够在不影戏驱动机构的前提下实现底盘本体的升降,从而调节底盘的离地高度;本实用新型除草机器人用履带底盘的第一升降架和第二升降架分被通过独立的手轮丝杠进行调节,灵活度更高;本实用新型除草机器人用履带底盘的第一升降架和第二升降架结构相同,便于降低制造成本。总的来说,本实用新型除草机器人用履带底盘,结构简单,功能实用,有效解决了在玉米大田作物环境下,除草机器人的底盘交底容易产生托底现象,但是现有的履带底盘通常不能调节底盘离地高度的问题。
技术特征:
1.一种除草机器人用履带底盘,其特征在于:包括底盘本体(1)、第一升降架(2)和第二升降架(3),所述底盘本体(1)的侧壁上开设有与所述第一升降架(2)和第二升降架(3)配合的缺口(101),所述底盘本体(1)内焊接有导向柱(103),所述第一升降架(2)和第二升降架(3)均可上下滑动的设置在所述导向柱(103)上,所述底盘本体(1)内通过旋转底座(104)设置可转动的设置有丝杠(10),所述丝杠(10)与所述第一升降架(2)和第二升降架(3)之间螺纹配合,所述丝杠(10)的顶端设置有手轮(11);所述第一升降架(2)上设置有第一履带轮(8),所述第二升降架(3)上设置有第二履带轮(9),所述第一履带轮(8)和第二履带轮(9)之间通过橡胶履带(14)连接。
2.根据权利要求1所述的除草机器人用履带底盘,其特征在于:第一升降架(2)和第二升降架(3)的结构相同。
3.根据权利要求2所述的除草机器人用履带底盘,其特征在于:所述第一升降架(2)包括横板(201)、立板(202)和l型延伸板(203),两块所述立板(202)焊接在所述横板(201)的上表面上,两个所述l型延伸板(203)焊接在所述横板(201)的下表面上。
4.根据权利要求3所述的除草机器人用履带底盘,其特征在于:所述第一升降架(2)的立板(202)的内侧设置有驱动电机(4),所述驱动电机(4)的输出轴穿过所述立板(202)后与第一传动箱(5)连接,所述第一传动箱(5)的下端通过传动轴(6)与l型延伸板(203)上的第二传动箱(7)连接,所述第二传动箱(7)的输出轴上设置第一履带轮(8)。
5.根据权利要求3所述的除草机器人用履带底盘,其特征在于:所述第二升降架(3)的l型延伸板(203)上设置有第二履带轮(9)。
6.根据权利要求1所述的除草机器人用履带底盘,其特征在于:所述底盘本体(1)的中间位置设置用于安装除草装置的通孔(102)。
7.根据权利要求1所述的除草机器人用履带底盘,其特征在于:所述底盘本体(1)的左端设置有蓄电池(12),所述底盘本体(1)的右端设置有控制箱(13)。
技术总结
本技术公开了一种除草机器人用履带底盘,包括底盘本体、第一升降架和第二升降架,底盘本体的侧壁上开设有与第一升降架和第二升降架配合的缺口,底盘本体内焊接有导向柱,第一升降架和第二升降架均可上下滑动的设置在导向柱上,底盘本体内通过旋转底座设置可转动的设置有丝杠,丝杠与第一升降架和第二升降架之间螺纹配合,丝杠的顶端设置有手轮;第一升降架上设置有第一履带轮,第二升降架上设置有第二履带轮,第一履带轮和第二履带轮之间通过橡胶履带连接。本技术除草机器人用履带底盘,结构简单,功能实用,有效解决了在玉米大田作物环境下,除草机器人的底盘交底容易产生托底现象,但是现有的履带底盘通常不能调节底盘离地高度的问题。
技术研发人员:王彩霞,杨晓惠,李裕,尹晓琳,李翠芳
受保护的技术使用者:邯郸科技职业学院
技术研发日:20230606
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!