一种自锁式连杆机构的制作方法
本技术涉及折叠器,尤其涉及一种自锁式连杆机构。
背景技术:
1、目前市场上折叠车的四连杆折叠器,锁紧方式都采用全手动锁紧模式,车主在使用过程中的不规范操作,折叠器的手柄没有锁紧到位骑乘,骑行途中折叠器会有瞬间自动打开,车子失控的安全风险。
2、因此,现有技术存在缺陷,需要改进。
技术实现思路
1、本实用新型要解决的技术问题是:提供一种自锁式连杆机构,避免车主在使用过程中的不规范操作,折叠器的手柄没有锁紧到位骑乘,消除骑乘者骑行途中的安全风险。
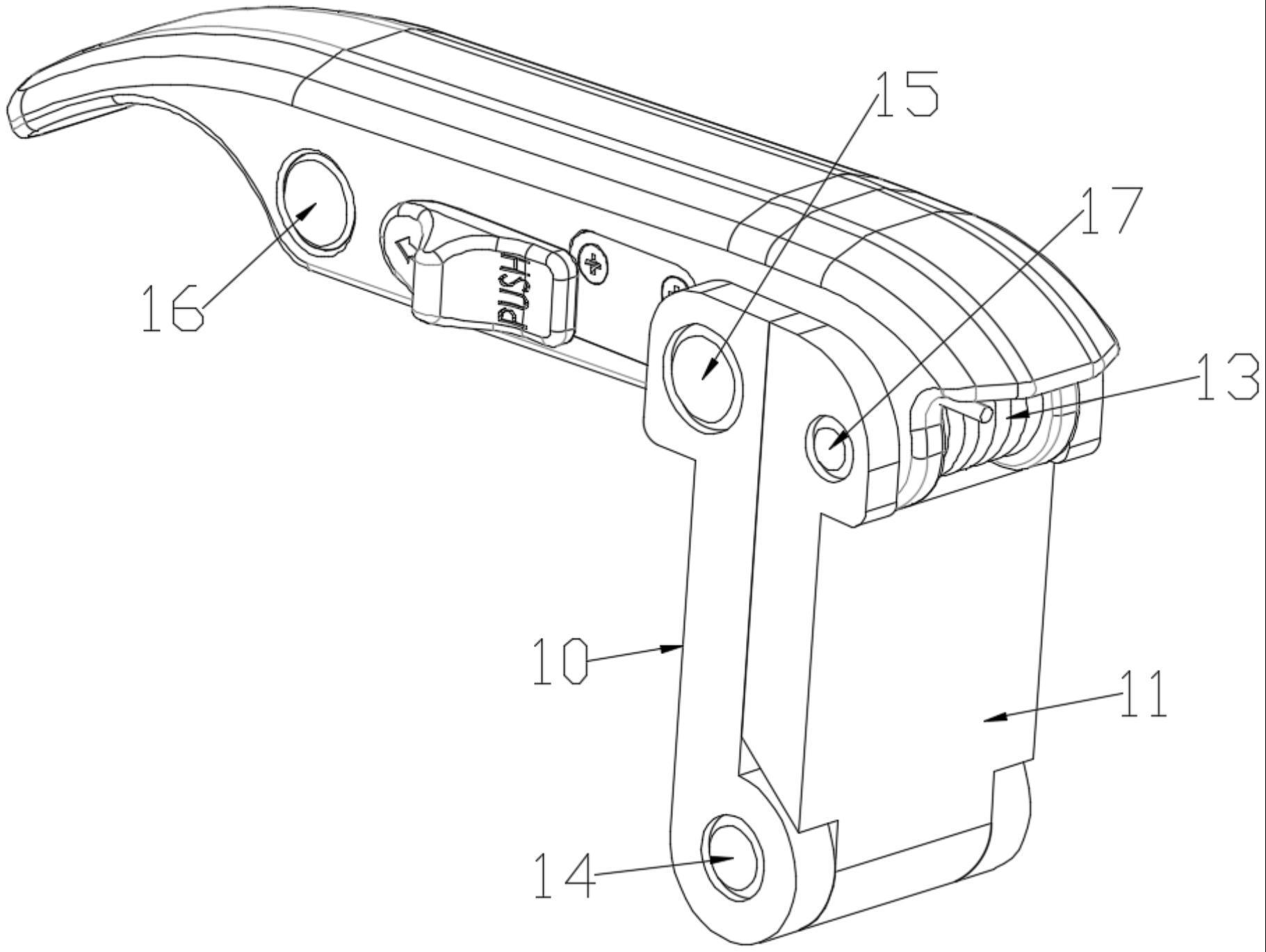
2、本实用新型的技术方案如下:提供一种自锁式连杆机构,包括:第一折叠件,第二折叠件,手柄,调节杆,扭簧,穿过所述第一折叠件、第二折叠件的第一转轴,连接在所述调节杆两端第二转轴、第三转轴,穿过所述第二折叠件、手柄的第四转轴,安装在所述手柄上的自锁杆结构;所述第二转轴设置有自锁槽,所述自锁杆结构与所述自锁槽配合,所述第二转轴穿过所述第一折叠件,所述第三转轴穿过所述手柄,所述扭簧套在所述第四转轴上,所述第四转轴将所述手柄分为外端、自锁端,所述扭簧的两端分别与所述手柄的外端、第二折叠件抵接或连接;所述自锁杆结构、第三转轴设置在自锁端上。
3、进一步地,所述自锁杆结构包括:压缩弹簧,自锁杆本体,与所述自锁杆本体连接的限位块;所述手柄设置有往复槽,所述往复槽的侧面为限位窗;所述压缩弹簧的两端分别与自锁杆本体、往复槽的底部抵接,所述限位块插入所述限位窗中,所述自锁杆本体朝向所述第二转轴。
4、进一步地,所述自锁杆结构还包括:与所述限位块连接的拨块。
5、进一步地,所述手柄包括:手柄本体、与所述手柄本体连接的盖板;所述盖板盖住往复槽的一段形成限位窗。
6、进一步地,所述手柄设置有容置槽,所述容置槽与所述调节杆配合。
7、进一步地,所述容置槽与所述往复槽平行。
8、进一步地,所述第一折叠件的高度与第二折叠件的高度相同。所述第一折叠件的宽度与第二折叠件的宽度相同。
9、采用上述方案,本实用新型提供一种自锁式连杆机构,当第一折叠件、第二折叠件接近闭合状态时,手柄在辅助弹簧的推力作用下,可以主动完成手柄自动锁紧功能,避免车主在使用过程中的不规范操作,手柄没有锁紧到位骑乘,消除骑乘者骑行途中的安全风险。
技术特征:
1.一种自锁式连杆机构,其特征在于,包括:第一折叠件,第二折叠件,手柄,调节杆,扭簧,穿过所述第一折叠件、第二折叠件的第一转轴,连接在所述调节杆两端第二转轴、第三转轴,穿过所述第二折叠件、手柄的第四转轴,安装在所述手柄上的自锁杆结构;所述第二转轴设置有自锁槽,所述自锁杆结构与所述自锁槽配合,所述第二转轴穿过所述第一折叠件,所述第三转轴穿过所述手柄,所述扭簧套在所述第四转轴上,所述第四转轴将所述手柄分为外端、自锁端,所述扭簧的两端分别与所述手柄的外端、第二折叠件抵接或连接;所述自锁杆结构、第三转轴设置在自锁端上。
2.根据权利要求1所述的一种自锁式连杆机构,其特征在于,所述自锁杆结构包括:压缩弹簧,自锁杆本体,与所述自锁杆本体连接的限位块;所述手柄设置有往复槽,所述往复槽的侧面为限位窗;所述压缩弹簧的两端分别与自锁杆本体、往复槽的底部抵接,所述限位块插入所述限位窗中,所述自锁杆本体朝向所述第二转轴。
3.根据权利要求2所述的一种自锁式连杆机构,其特征在于,所述自锁杆结构还包括:与所述限位块连接的拨块。
4.根据权利要求2所述的一种自锁式连杆机构,其特征在于,所述手柄包括:手柄本体、与所述手柄本体连接的盖板;所述盖板盖住往复槽的一段形成限位窗。
5.根据权利要求2所述的一种自锁式连杆机构,其特征在于,所述手柄设置有容置槽,所述容置槽与所述调节杆配合。
6.根据权利要求5所述的一种自锁式连杆机构,其特征在于,所述容置槽与所述往复槽平行。
7.根据权利要求1所述的一种自锁式连杆机构,其特征在于,所述第一折叠件的高度与第二折叠件的高度相同。
8.根据权利要求1所述的一种自锁式连杆机构,其特征在于,所述第一折叠件的宽度与第二折叠件的宽度相同。
技术总结
本技术公开一种自锁式连杆机构,包括:第一折叠件,第二折叠件,手柄,调节杆,扭簧,穿过所述第一折叠件、第二折叠件的第一转轴,连接在所述调节杆两端第二转轴、第三转轴,穿过所述第二折叠件、手柄的第四转轴,安装在所述手柄上的自锁杆结构;所述第二转轴设置有自锁槽,所述自锁杆结构与所述自锁槽配合,所述第二转轴穿过所述第一折叠件,所述第三转轴穿过所述手柄,所述扭簧套在所述第四转轴上。本技术的当第一折叠件、第二折叠件接近闭合状态时,手柄在辅助弹簧的推力作用下,可以主动完成手柄自动锁紧功能,避免车主在使用过程中的不规范操作,手柄没有锁紧到位骑乘,消除骑乘者骑行途中的安全风险。
技术研发人员:何享林,唐敬
受保护的技术使用者:聚力运动科技(深圳)有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!