一种机械零部件加工转运装置的制作方法
本技术涉及转运装置,具体为一种机械零部件加工转运装置。
背景技术:
1、机械零件又称机械元件是构成机械的基本元件,是组成机械和机器的不可分拆的单个制件,机械零部件在加工过程中,常常需要将其从一个加工位置运送到另一个加工位置,由于需要运送的零部件较多且具备一定的重量,所以便需要用到一种转运装置。
2、目前传统的转运装置还存在一些不足的地方,零部件通常是放置于箱体内然后再将箱体放置在转运装置移动到工作地点,由于工位的高度不同,需要工作人员手动将箱体搬运到不同高度的工位上,这样不仅增加了工作人员的劳动负担,还降低了零部件转运的效率,为此我们提出一种机械零部件加工转运装置。
技术实现思路
1、基于上述背景技术中所提到的现有技术中的不足之处,为此本实用新型提供了一种机械零部件加工转运装置。
2、本实用新型通过采用如下技术方案克服以上技术问题,具体为:
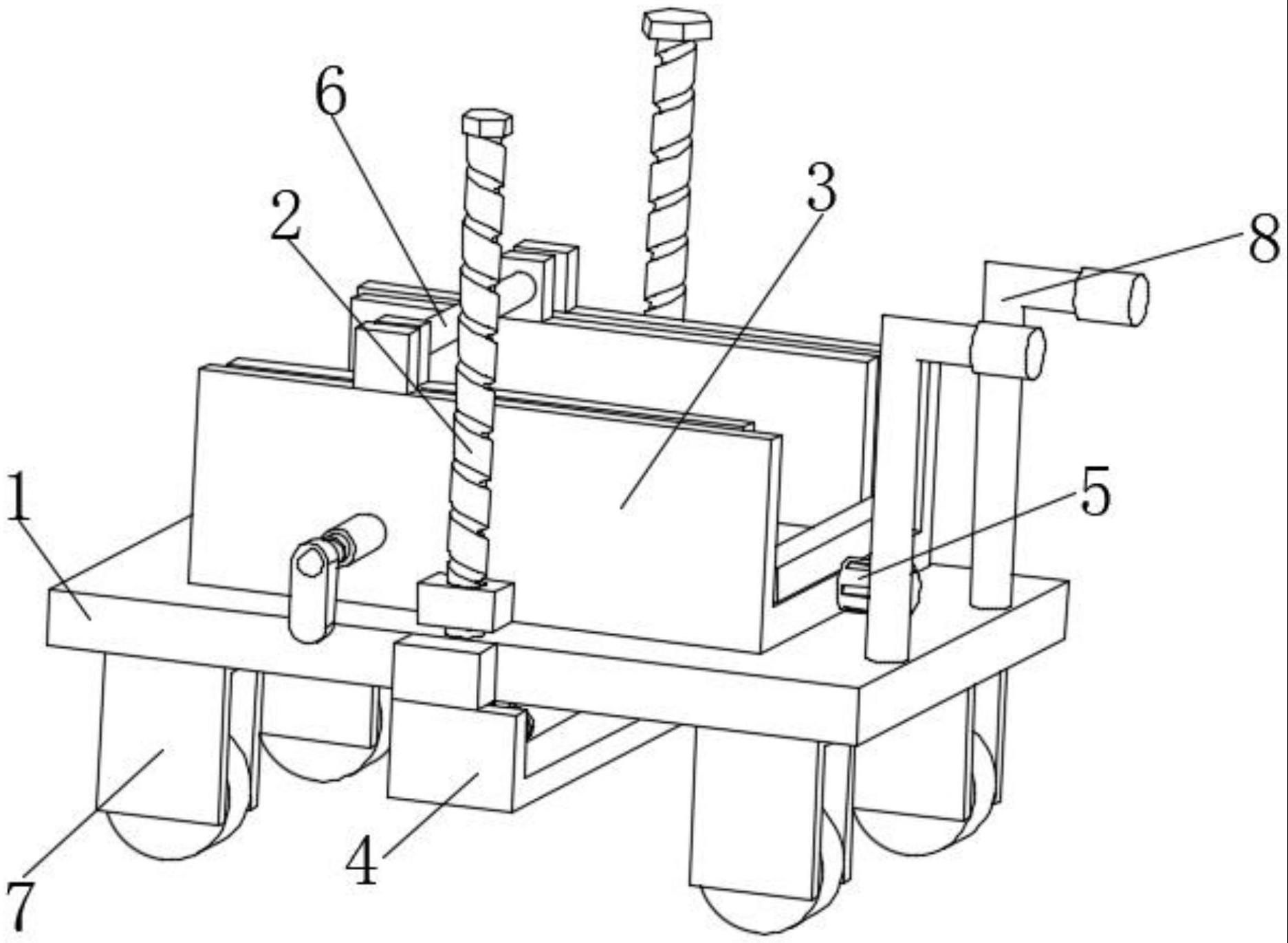
3、一种机械零部件加工转运装置,包括:底板,所述底板的顶部设置有升降机构,且升降机构延伸至底板的底部,所述升降机构上连接有放置板,所述底板的正面和背面之间设置有驱动机构,且驱动机构延伸至底板的底部,所述升降机构与驱动机构啮合,所述驱动机构用于驱动升降机构带动放置板进行上下移动,所述放置板内壁的底部开设有横槽,所述放置板的一侧设置有送料机构,且送料机构延伸至横槽的内部并与横槽的内壁连接,所述送料机构用于将放置板内表面的物品进行推出,所述放置板的顶部设置有固定机构,且固定机构分别延伸至放置板的正面和背面,所述固定机构用于对放置板内的箱体进行固定。
4、作为本实用新型进一步的方案:所述升降机构包括两个第一螺纹杆、两个阻挡块、两个螺纹块和两个涡轮,两个所述第一螺纹杆均转动连接在底板的顶部,且两个第一螺纹杆的底端均延伸至底板的底部,两个所述阻挡块分别连接在两个第一螺纹杆的顶端,两个所述螺纹块均螺纹连接在两个第一螺纹杆的外表面,两个所述涡轮分别连接在两个第一螺纹杆的外表面。
5、作为本实用新型再进一步的方案:所述驱动机构包括两个固定块、u型座、蜗杆和第一电机,两个所述固定块分别连接在底板的正面和背面,所述u型座连接在两个固定块的底部之间,所述蜗杆转动连接在u型座的内表面之间,且蜗杆分别与两个涡轮啮合,所述第一电机连接在u型座的背面,且第一电机输出轴的一端延伸至u型座的内部并与蜗杆的一端连接。
6、作为本实用新型再进一步的方案:所述送料机构包括丝杆、连接块、推动板和第二电机,所述丝杆转动连接在横槽内壁的两侧之间,所述连接块螺纹连接在丝杆的外表面,所述推动板连接在连接块的底部,所述第二电机连接在放置板的一侧,且第二电机输出轴的一端延伸至横槽的内部并与丝杆的一端连接。
7、作为本实用新型再进一步的方案:所述固定机构包括两个衔接块、固定杆和两个滑块,两个所述衔接块均连接在放置板的顶部,所述固定杆连接在两个衔接块之间,两个所述滑块均滑动连接在固定杆的圆周表面。
8、作为本实用新型再进一步的方案:所述固定机构还包括两个螺纹套、两个第二螺纹杆、转把和固定板,两个所述螺纹套分别固定连接在放置板的正面和背面,两个所述第二螺纹杆螺纹连接在两个螺纹套的内部,且两个第二螺纹杆的两端均延伸至两个螺纹套的外部,两个所述第二螺纹杆的一端均延伸至放置板内,两个所述转把分别连接在两个第二螺纹杆的另一端,两个所述固定板相背的一面分别与两个第二螺纹杆的一端转动连接,且两个固定板的顶部分别与两个滑块的底部连接。
9、作为本实用新型再进一步的方案:所述底板的底部连接有多个万向轮,所述底板顶部的一侧连接有两个握把,且两个握把上连接有橡胶套。
10、采用以上结构后,本实用新型相较于现有技术,具备以下优点:
11、1.将装有零部件的箱体放在放置板内,手握两个握把推动底板使多个万向轮转动移动到指定工位,启动第一电机输出轴带动蜗杆进行转动并传动两个涡轮进行同向转动,使得两个涡轮带动两个第一螺纹杆进行转动使得两个螺纹块进行同步上升并带动放置板进行上升,将放置板调整到合适的高度,调整完毕后启动第二电机输出轴带动丝杆进行转动使连接块向左进行移动并带动推动板进行移动将放置板内的箱体进行匀速推出,使得本装置可以便于工作人员将装有零部件的箱体调整至和工位一样的高度后,并将箱体输送至工位上,无需人工将箱体从低处搬到高处,减少工作人员的劳动负担的同时,还提高转运零部件的工作效率。
12、2.将箱体放入放置板内并紧贴推动板的一侧,手动转动两个转把分别带动两个第二螺纹杆进行转动,使得两个第二螺纹杆进行转动往放置板内部进行移动并带动两个固定板相互靠近,从而对箱体进行挤压固定限制箱体的活动范围,同时两个滑块通过连接两个固定板在固定杆上滑动,使得两个固定板对箱体固定更加牢固避免箱体产生晃动,防止零部件受到箱体晃动对箱体产生碰撞导致损伤。
技术特征:
1.一种机械零部件加工转运装置,包括:底板(1),其特征在于,所述底板(1)的顶部设置有升降机构(2),且升降机构(2)延伸至底板(1)的底部,所述升降机构(2)上连接有放置板(3),所述底板(1)的正面和背面之间设置有驱动机构(4),且驱动机构(4)延伸至底板(1)的底部,所述升降机构(2)与驱动机构(4)啮合,所述驱动机构(4)用于驱动升降机构(2)带动放置板(3)进行上下移动,所述放置板(3)内壁的底部开设有横槽,所述放置板(3)的一侧设置有送料机构(5),且送料机构(5)延伸至横槽的内部并与横槽的内壁连接,所述送料机构(5)用于将放置板(3)内表面的物品进行推出,所述放置板(3)的顶部设置有固定机构(6),且固定机构(6)分别延伸至放置板(3)的正面和背面,所述固定机构(6)用于对放置板(3)内的箱体进行固定。
2.根据权利要求1所述的一种机械零部件加工转运装置,其特征在于,所述升降机构(2)包括两个第一螺纹杆(201)、两个阻挡块(202)、两个螺纹块(203)和两个涡轮(204),两个所述第一螺纹杆(201)均转动连接在底板(1)的顶部,且两个第一螺纹杆(201)的底端均延伸至底板(1)的底部,两个所述阻挡块(202)分别连接在两个第一螺纹杆(201)的顶端,两个所述螺纹块(203)均螺纹连接在两个第一螺纹杆(201)的外表面,两个所述涡轮(204)分别连接在两个第一螺纹杆(201)的外表面。
3.根据权利要求2所述的一种机械零部件加工转运装置,其特征在于,所述驱动机构(4)包括两个固定块(401)、u型座(402)、蜗杆(403)和第一电机(404),两个所述固定块(401)分别连接在底板(1)的正面和背面,所述u型座(402)连接在两个固定块(401)的底部之间,所述蜗杆(403)转动连接在u型座(402)的内表面之间,且蜗杆(403)分别与两个涡轮(204)啮合,所述第一电机(404)连接在u型座(402)的背面,且第一电机(404)输出轴的一端延伸至u型座(402)的内部并与蜗杆(403)的一端连接。
4.根据权利要求3所述的一种机械零部件加工转运装置,其特征在于,所述送料机构(5)包括丝杆(501)、连接块(502)、推动板(503)和第二电机(504),所述丝杆(501)转动连接在横槽内壁的两侧之间,所述连接块(502)螺纹连接在丝杆(501)的外表面,所述推动板(503)连接在连接块(502)的底部,所述第二电机(504)连接在放置板(3)的一侧,且第二电机(504)输出轴的一端延伸至横槽的内部并与丝杆(501)的一端连接。
5.根据权利要求4所述的一种机械零部件加工转运装置,其特征在于,所述固定机构(6)包括两个衔接块(605)、固定杆(606)和两个滑块(607),两个所述衔接块(605)均连接在放置板(3)的顶部,所述固定杆(606)连接在两个衔接块(605)之间,两个所述滑块(607)均滑动连接在固定杆(606)的圆周表面。
6.根据权利要求5所述的一种机械零部件加工转运装置,其特征在于,所述固定机构(6)还包括两个螺纹套(601)、两个第二螺纹杆(602)、转把(603)和固定板(604),两个所述螺纹套(601)分别固定连接在放置板(3)的正面和背面,两个所述第二螺纹杆(602)螺纹连接在两个螺纹套(601)的内部,且两个第二螺纹杆(602)的两端均延伸至两个螺纹套(601)的外部,两个所述第二螺纹杆(602)的一端均延伸至放置板(3)内,两个所述转把(603)分别连接在两个第二螺纹杆(602)的另一端,两个所述固定板(604)相背的一面分别与两个第二螺纹杆(602)的一端转动连接,且两个固定板(604)的顶部分别与两个滑块(607)的底部连接。
7.根据权利要求6所述的一种机械零部件加工转运装置,其特征在于,所述底板(1)的底部连接有多个万向轮(7)。
8.根据权利要求7所述的一种机械零部件加工转运装置,其特征在于,所述底板(1)顶部的一侧连接有两个握把(8),且两个握把(8)上连接有橡胶套。
技术总结
本技术涉及转运装置技术领域,具体为一种机械零部件加工转运装置,包括:底板,所述底板的顶部设置有升降机构,且升降机构延伸至底板的底部,所述升降机构上连接有放置板,所述底板的正面和背面之间设置有驱动机构,且驱动机构延伸至底板的底部,所述升降机构与驱动机构啮合,所述驱动机构用于驱动升降机构带动放置板进行上下移动,将装有零部件的箱体放入放置板内,启动驱动机构可以驱动升降机构带动放置板进行上升至和工位一样的高度后,此时启动送料机构即可将箱体缓缓从放置板的内部推出送至工位,并将箱体输送至工位上,使得本装置无需人工将箱体从低处搬到高处,减少工作人员的劳动负担的同时,还提高转运零部件的工作效率。
技术研发人员:郑伟,时广晗
受保护的技术使用者:大连诺吉机械设备有限公司
技术研发日:20230727
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!