一种非线性声波隧道衬砌脱空无损检测智能小车的制作方法
本技术涉及一种智能小车,更具体的说是一种非线性声波隧道衬砌脱空无损检测智能小车。
背景技术:
1、铁路隧道是修建在地下或水下并铺设铁路供机车车辆通行的建筑物。隧道结构分为主体结构物和附属构筑物,洞门、洞身、洞身衬砌作为主体结构,构成隧道结构的支承体系。由于我国地域辽阔,自然条件及地形地质条件复杂多变,受设计、施工及运营管理等诸多环节中各种不利因素的影响,隧道在投入使用后会出现各种不同程度的病害,例如衬砌变形及裂损、碳化腐蚀、掉块、结构渗漏水等,隧道衬砌结构的承载能力和耐久性不断下降,严重威胁着隧道内的行车安全,缩短了隧道的维护周期和使用寿命。
2、现有的检测装置检测隧道的衬砌变形及裂损等现象时,往往由检测人员自行携带设备对不同路段进行定点声波检测,该检测方法效率低下,并且由于隧道建设工程的隐蔽性以及隧道施工的复杂性,隧道工程的施工与运行中仍旧会出现很多质量问题和事故。
技术实现思路
1、本实用新型主要解决的技术问题是提供一种非线性声波隧道衬砌脱空无损检测智能小车,解决了上述背景技术中的问题。
2、为解决上述技术问题,根据本实用新型的一个方面,更具体的说是一种非线性声波隧道衬砌脱空无损检测智能小车,包括车架,所述车架的顶端从左向右依次安装有控制箱、供电箱和两个固定箱,所述控制箱的上方安装有显示器,所述供电箱的顶端设有折叠杆,所述折叠杆包括上杆和下杆,所述折叠杆的顶端安装有探头,所述车架的左右两端分别设有辅助轮和驱动轮。
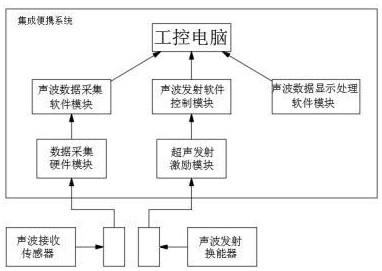
3、更进一步的,所述控制箱的内部集成有工控电脑、硬件模块和软件模块,其中软件模块包括声波数据采集软件模块、声波发射软件控制模块、声波数据显示处理软件模块,所述硬件模块包括数据采集硬件模块、超声发射激励模块、多路开关控制模块、里程信息输入模块。
4、更进一步的,所述探头包括声波接收传感器和声波发射换能器,所述声波接收传感器的接口端与数据采集硬件模块信号连接,所述数据采集硬件模块通过所述声波数据采集软件模块将信号传递至工控电脑。
5、更进一步的,所述声波发射换能器的接口端与超声发射激励模块信号连接,所述超声发射激励模块通过所述声波发射软件控制模块将信号反馈至工控电脑,所述声波数据显示处理软件模块与所述工控电脑信号连接,其声波数据显示处理软件模块通过所述显示器对数据进行显示。
6、更进一步的,两个所述固定箱的上方均贯穿设置有驱动电机,所述车架的右侧开设有驱动槽,所述驱动槽与两个固定箱之间均贯穿设置有传动杆,所述传动杆的上下两端分别套设有第二锥形齿轮和第三齿轮。
7、更进一步的,所述驱动电机的输出轴套设有第一锥形齿轮,其第一锥形齿轮与第二锥形齿轮啮合连接,所述传动杆的表面套设有两个限位环,两个限位环分别位于驱动槽和固定箱的内部。
8、更进一步的,两个所述驱动轮的中心处均套设有驱动轴,两个所述驱动轴另一端均贯穿至驱动槽的内部并套设有第二齿轮,所述驱动槽的内部设有两个第一齿轮,两个所述第一齿轮的表面共轴连接有直角齿轮,所述第三齿轮与直角齿轮转动连接,所述第一齿轮与第二齿轮转动连接。
9、更进一步的,所述上杆与下杆连接处套设有连接架,所述上杆的底端和下杆的顶端均开设有咬合齿,其上杆与下杆通过咬合齿转动连接。
10、更进一步的,所述上杆的左侧底端安装有弧杆,所述下杆的顶部贯穿开设有贯穿槽,所述弧杆的底端贯穿至贯穿槽的内部,所述弧杆的底端呈倒钩状,所述贯穿槽的内径呈左侧细右侧粗,其贯穿槽的左侧内壁限制弧杆底端倒钩状通过。
11、更进一步的,所述下杆的内部且位于贯穿槽的下方开设有拽动槽,所述拽动槽的内部贯穿设置有拽动杆,所述拽动槽的内部且位于拽动杆的表面固定套设有摩擦柱,所述摩擦柱与弧杆的下表面压迫接触,所述拽动杆的两端分别套设有拽动柄和固定环,所述拽动杆的表面且位于摩擦柱的另一侧套设有弹簧,所述摩擦柱的一侧和拽动槽的另一侧内壁均设有卡齿。
12、本实用新型一种非线性声波隧道衬砌脱空无损检测智能小车的有益效果为:
13、1、通过设置的折叠杆、弧杆和摩擦柱等结构的配合,从而在将该探头抬高时,只需外拽拽动柄就可以让摩擦柱解开锁死的状态并进行转动,这样弧杆就可以自由的在贯穿槽内移动,此时上杆和下架被展开之后可以被牢牢固定,这样就可以确保该探头能够安全高效的对隧道进行探测;
14、2、通过设置的工控电脑、硬件模块和软件模块,是根据实际隧道衬砌脱空检测对仪器便携化、自动化的要求,为了提高仪器的检测效率,对检测设备系统进行了优化设计,这样不仅大幅度提高了检测的效率,并且可以实现隧道内衬砌脱空进行无损检测。
技术特征:
1.一种非线性声波隧道衬砌脱空无损检测智能小车,包括车架(1),其特征在于:所述车架(1)的顶端从左向右依次安装有控制箱(3)、供电箱(10)和两个固定箱(9),所述控制箱(3)的上方安装有显示器(4),所述供电箱(10)的顶端设有折叠杆(7),所述折叠杆(7)包括上杆(701)和下杆(702),所述折叠杆(7)的顶端安装有探头(8),所述车架(1)的左右两端分别设有辅助轮(2)和驱动轮(5)。
2.根据权利要求1所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:所述控制箱(3)的内部集成有工控电脑、硬件模块和软件模块,其中软件模块包括声波数据采集软件模块、声波发射软件控制模块、声波数据显示处理软件模块,所述硬件模块包括数据采集硬件模块、超声发射激励模块、多路开关控制模块、里程信息输入模块。
3.根据权利要求2所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:所述探头(8)包括声波接收传感器和声波发射换能器,所述声波接收传感器的接口端与数据采集硬件模块信号连接,所述数据采集硬件模块通过所述声波数据采集软件模块将信号传递至工控电脑。
4.根据权利要求3所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:所述声波发射换能器的接口端与超声发射激励模块信号连接,所述超声发射激励模块通过所述声波发射软件控制模块将信号反馈至工控电脑,所述声波数据显示处理软件模块与所述工控电脑信号连接,其声波数据显示处理软件模块通过所述显示器(4)对数据进行显示。
5.根据权利要求1所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:两个所述固定箱(9)的上方均贯穿设置有驱动电机(6),所述车架(1)的右侧开设有驱动槽(11),所述驱动槽(11)与两个固定箱(9)之间均贯穿设置有传动杆(17),所述传动杆(17)的上下两端分别套设有第二锥形齿轮(20)和第三齿轮(16)。
6.根据权利要求5所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:所述驱动电机(6)的输出轴套设有第一锥形齿轮(19),其第一锥形齿轮(19)与第二锥形齿轮(20)啮合连接,所述传动杆(17)的表面套设有两个限位环(18),两个限位环(18)分别位于驱动槽(11)和固定箱(9)的内部。
7.根据权利要求6所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:两个所述驱动轮(5)的中心处均套设有驱动轴(15),两个所述驱动轴(15)另一端均贯穿至驱动槽(11)的内部并套设有第二齿轮(14),所述驱动槽(11)的内部设有两个第一齿轮(12),两个所述第一齿轮(12)的表面共轴连接有直角齿轮(13),所述第三齿轮(16)与直角齿轮(13)转动连接,所述第一齿轮(12)与第二齿轮(14)转动连接。
8.根据权利要求1所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:所述上杆(701)与下杆(702)连接处套设有连接架(22),所述上杆(701)的底端和下杆(702)的顶端均开设有咬合齿,其上杆(701)与下杆(702)通过咬合齿转动连接。
9.根据权利要求1所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:所述上杆(701)的左侧底端安装有弧杆(21),所述下杆(702)的顶部贯穿开设有贯穿槽(23),所述弧杆(21)的底端贯穿至贯穿槽(23)的内部,所述弧杆(21)的底端呈倒钩状,所述贯穿槽(23)的内径呈左侧细右侧粗,其贯穿槽(23)的左侧内壁限制弧杆(21)底端倒钩状通过。
10.根据权利要求9所述的一种非线性声波隧道衬砌脱空无损检测智能小车,其特征在于:所述下杆(702)的内部且位于贯穿槽(23)的下方开设有拽动槽(29),所述拽动槽(29)的内部贯穿设置有拽动杆(25),所述拽动槽(29)的内部且位于拽动杆(25)的表面固定套设有摩擦柱(24),所述摩擦柱(24)与弧杆(21)的下表面压迫接触,所述拽动杆(25)的两端分别套设有拽动柄(28)和固定环(30),所述拽动杆(25)的表面且位于摩擦柱(24)的另一侧套设有弹簧(27),所述摩擦柱(24)的一侧和拽动槽(29)的另一侧内壁均设有卡齿(26)。
技术总结
本技术涉及智能小车技术领域,且公开了一种非线性声波隧道衬砌脱空无损检测智能小车,包括车架,所述车架的顶端从左向右依次安装有控制箱、供电箱和两个固定箱,所述控制箱的上方安装有显示器,所述供电箱的顶端设有折叠杆,所述折叠杆包括上杆和下杆,所述折叠杆的顶端安装有探头,所述车架的左右两端分别设有辅助轮和驱动轮,所述控制箱的内部集成有工控电脑、硬件模块和软件模块。通过设置的工控电脑、硬件模块和软件模块,是根据实际隧道衬砌脱空检测对仪器便携化、自动化的要求,为了提高仪器的检测效率,对检测设备系统进行了优化设计,这样不仅大幅度提高了检测的效率,并且可以实现隧道内衬砌脱空进行无损检测。
技术研发人员:曹坤,朱思义,朱文瑾,吴虎
受保护的技术使用者:安徽彭工智能装备科技有限公司
技术研发日:20230728
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!