一种基于刚柔结合的变形轮式抛投式机器人
本技术属于机器人领域,具体涉及一种基于刚柔结合的变形轮式抛投式机器人。
背景技术:
1、抛投式机器人是一种典型的小型地面移动机器人,可通过人工抛投、弹射、空投等方式进入工作区域,而现有大多数抛投式机器人受体积大小、抗冲击能力等因素无法适应楼梯、山地、陡坡等特殊地形,严重降低了机器人的运动效率和可靠性,限制了机器人的可应用场景。
2、因此,设计一款灵活小巧、抗冲击能力强、非结构化地形越障能力强的抛投式机器人对解决以上问题具有重要的意义。
技术实现思路
1、本实用新型的目的是:提出一种采用柔性轮与变形轮相结合的方式,在保证机器人有足够抗冲击能力的情况下,增大机器人的越障性能。
2、为实现上述技术目的,本实用新型采用的技术方案如下:
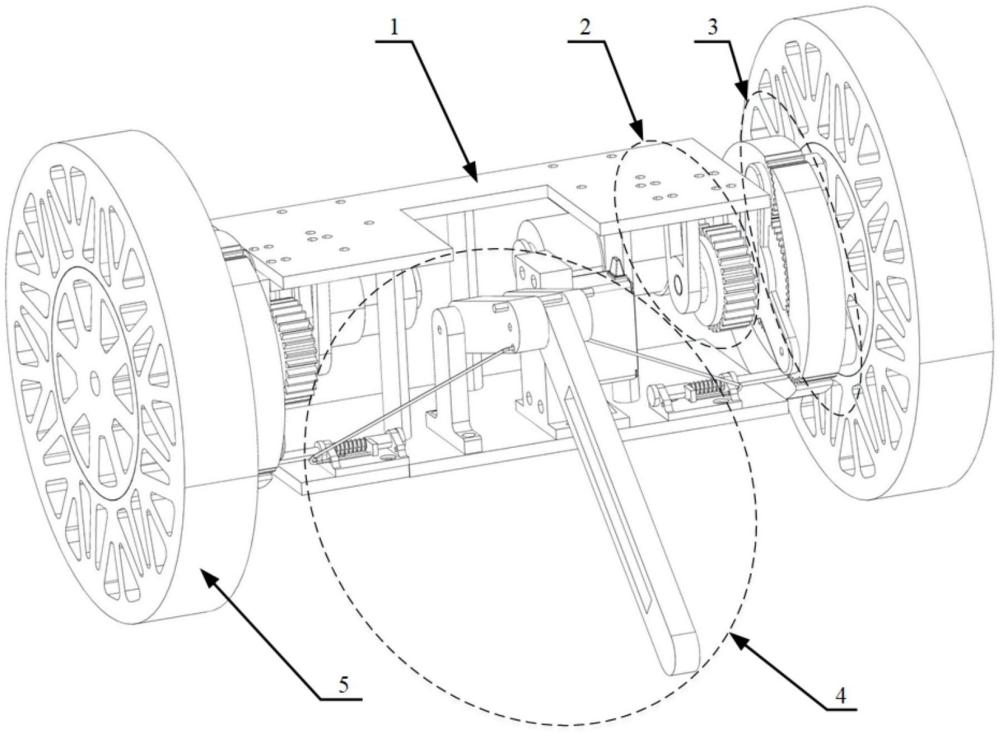
3、本实用新型的一种基于刚柔结合的变形轮式抛投式机器人,包括机身、运动传动机构、柔性变形轮组和尾撑;
4、所述柔性变形轮组至少设置两组并分设于机身的两侧,一组柔性变形轮组包括同轴设置的变形轮和柔性轮;所述柔性轮采用柔性材料制作,所述变形轮可变形为轮式结构或腿式结构;当变形轮变形为轮式结构时,变形轮外径小于柔性轮外径,机器人由柔性轮支承行进;当变形轮展开为腿式结构时,变形轮外径大于柔性轮外径,机器人由变形轮支承实现越障;
5、所述运动传动机构设置于机身,用于驱动柔性变形轮组转动;
6、所述尾撑采用可折叠结构,其设置于机身尾部;当机器人行进时,所述尾撑从机身尾部伸出以避免机器人行进时倾覆,当机器人被抛投时,尾撑收折以避免其与地面碰撞受损;
7、进一步,所述机身包括底板、上板和固定于底板与上板之间的支撑柱;所述运动传动机构和尾撑均安装于底板与上板之间;
8、进一步,所述运动传动机构包括驱动电机和用于将驱动电机的动力传递至柔性变形轮组的减速齿轮副;
9、进一步,所述变形轮包括轮辐、中心齿轮和弧形轮腿;所述中心齿轮通过与之固定的中心轴连接于轮辐中心,所述中心轴端部设有联轴器用于接受来自运动传动机构的动力;若干弧形轮腿围绕中心齿轮设置并与轮辐铰接;各弧形轮腿一端设有用于与中心齿轮啮合的不完全齿轮;
10、进一步,所述尾撑包括尾撑固定座、一级尾撑杆、二级尾撑杆和舵机;所述尾撑固定座固定于机身,所述一级尾撑杆内端铰接于尾撑固定座,一级尾撑杆外端与二级尾撑杆内端铰接;所述一级尾撑杆上设有用于限制二级尾撑杆相对于一级尾撑杆转动角度范围的限位柱;
11、进一步,所述机身上设有与变形轮相对的弹簧销;所述一级尾撑杆通过牵引绳连接弹簧销,一级尾撑杆可通过其摆动拉动弹簧销伸出并卡住轮辐;
12、进一步,所述柔性轮包括轮毂和安装于轮毂外圆的柔性三角镂空轮胎,所述柔性三角镂空轮胎采用柔性材料制作,其内部分布有若干三角形镂空结构。
13、本实用新型的有益效果为:当机器人在抛掷时和在平坦路面运动过程中,变形轮收拢至轮形状态,机器人柔性轮的直径大于变形轮直径;机器人整体由柔性轮支承行进,柔性轮具有良好的抗冲击性能和防滑效果。当机器人遇到楼梯或其他较大障碍物时,位于柔性轮内侧的变形轮展开至轮腿式结构,此时变形轮的外径大于柔性轮的外径,机器人整体由变形轮支承行进,利用变形轮实现障碍物的跨越。
技术特征:
1.一种基于刚柔结合的变形轮式抛投式机器人,其特征在于:包括机身、运动传动机构、柔性变形轮组和尾撑;
2.根据权利要求1所述的基于刚柔结合的变形轮式抛投式机器人,其特征在于:所述机身包括底板、上板和固定于底板与上板之间的支撑柱;所述运动传动机构和尾撑均安装于底板与上板之间。
3.根据权利要求2所述的基于刚柔结合的变形轮式抛投式机器人,其特征在于:所述运动传动机构包括驱动电机和用于将驱动电机的动力传递至柔性变形轮组的减速齿轮副。
4.根据权利要求3所述的基于刚柔结合的变形轮式抛投式机器人,其特征在于:所述变形轮包括轮辐、中心齿轮和弧形轮腿;所述中心齿轮通过与之固定的中心轴连接于轮辐中心,所述中心轴端部设有联轴器用于接受来自运动传动机构的动力;若干弧形轮腿围绕中心齿轮设置并与轮辐铰接;各弧形轮腿一端设有用于与中心齿轮啮合的不完全齿轮。
5.根据权利要求1所述的基于刚柔结合的变形轮式抛投式机器人,其特征在于:所述尾撑包括尾撑固定座、一级尾撑杆、二级尾撑杆和舵机;所述尾撑固定座固定于机身,所述一级尾撑杆内端铰接于尾撑固定座,一级尾撑杆外端与二级尾撑杆内端铰接;所述一级尾撑杆上设有用于限制二级尾撑杆相对于一级尾撑杆转动角度范围的限位柱;所述舵机用于驱动一级尾撑杆转动。
6.根据权利要求5所述的基于刚柔结合的变形轮式抛投式机器人,其特征在于:所述机身上设有与变形轮相对的弹簧销;所述一级尾撑杆通过牵引绳连接弹簧销,一级尾撑杆可通过其摆动拉动弹簧销伸出并卡住轮辐。
7.根据权利要求1所述的基于刚柔结合的变形轮式抛投式机器人,其特征在于:所述柔性轮包括轮毂和安装于轮毂外圆的柔性三角镂空轮胎,所述柔性三角镂空轮胎采用柔性材料制作,其内部分布有若干三角形镂空结构。
技术总结
本技术公开了一种基于刚柔结合的变形轮式抛投式机器人,包括机身、运动传动机构、柔性变形轮组和尾撑;所述柔性变形轮组至少设置两组并分设于机身的两侧,一组柔性变形轮组包括同轴设置的变形轮和柔性轮;所述运动传动机构设置于机身,用于驱动柔性变形轮组转动;所述尾撑采用可折叠结构,其设置于机身尾部;当机器人行进时,所述尾撑从机身尾部伸出以避免机器人行进时倾覆,当机器人被抛投时,尾撑收折以避免其与地面碰撞受损;本技术在保证机器人有足够抗冲击能力的情况下,增大机器人的越障性能。
技术研发人员:严林,龙樟,严俊,苏聪,肖海峰,陈小林,唐东林,谌贵辉,林伟,吴攀
受保护的技术使用者:西南石油大学
技术研发日:20230801
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!