一种便于拆卸的仿生机器人的制作方法
本技术涉及机器人,具体为一种便于拆卸的仿生机器人。
背景技术:
1、仿生机器人是指模仿生物、从事生物特点工作的机器人,通常仿生机器人有其他生物的类似体系和结构。其中四足机器人具有不同于其他仿生机器人的移动结构,通过驱动四足在地面爬行以适应复杂的地面环境,广泛运用于军事武器装备、民用搜救等领域。
2、根据公示的一种便于拆卸的仿真机器人(公开号:cn213259472u),上述申请中提出了一种新型的便于拆卸的滚轮式机器人,通过方形卡扣与柱形卡扣实现装置的卡紧,被动轮采用连杆连接,便于整体装置的拆卸。
3、但是上述设备在实际使用过程中,不适用于复杂的地形,通过连杆与胀圈连接被动轮节省了拆装时的工作量,但在复杂地形条件下,由于路面颠簸易导致零件脱落,同时内部的中央处理电路不具备保护装置,容易发生松动;鉴于此,我们提出了一种便于拆卸的仿生机器人。
技术实现思路
1、本实用新型的目的在于提供一种便于拆卸的仿生机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种便于拆卸的仿生机器人包括机箱,所述机箱上方活动连接有机盖,所述机箱两侧表面设置有连接座,所述连接座内部套接有支撑足,所述连接座轴心处固定连接有转杆,所述转杆两端活动连接有限位盘,所述转杆外表面固定安装有电机,所述转杆一端固定设置有转杆帽,所述机箱前侧表面固定安装有卡块,所述卡块中心处活动连接有锁定杆,所述锁定杆下端活动连接有限位帽,所述机箱中部内表面上设置有处理器保护结构,所述机箱内表面上一侧固定安装有电源保护壳,所述处理器保护结构包括:
3、单片机安装座,所述机箱中部内表面上规定安装有单片机安装座,所述单片机安装座上表面四周固定连接有插杆,所述插杆上端圆周外表面固定设置有固定块;
4、空心套杆,所述插杆外表面套接有空心套杆,所述空心套杆上表面固定安装有保护板。
5、优选的,所述卡块数量设置为两个,其中一组卡块固定安装于所述机盖前侧外表面上,另一组卡块固定安装于所述机箱前侧外表面上,且所述卡块中部都开设有与所述锁定杆相适配的安装孔。
6、优选的,所述锁定杆下端开设有与所述限位帽相适配的螺纹,所述转杆两端开设有与所述限位盘相适配的螺纹,设置开设有螺纹的锁定杆配合限位帽,保证机箱与机盖连接更加稳定。
7、优选的,所述支撑足数量设置为四个,两个为一组,且两组所述支撑足以所述机箱正面中线为对称轴对称设置于所述机箱两侧,通过两组支撑足可以实现机器人攀爬跨越等适用于复杂地形的功能。
8、优选的,所述支撑足底端外表面设置有防摩擦橡皮,减少支撑足底端的磨损。
9、优选的,所述电源保护壳外表面开设有电源线孔,方便电源线连接。
10、优选的,所述机箱上沿四周开设有卡槽,所述机盖下沿四周设置有与所述卡槽相适配的卡条,通过机盖与机箱卡接,保证在复杂地形下工作时,机体抖动不会使机盖与机箱连接松动。
11、优选的,所述空心套杆侧面开设有与所述固定块相适配的插槽。
12、与现有技术相比,本实用新型提供了一种便于拆卸的仿生机器人,具备以下有益效果:
13、1、该便于拆卸的仿生机器人,为了避免在复杂地形工作时,机体抖动对装置性能造成影响,通过将机盖与机箱卡接,同时追加锁定杆固定保证机箱与机盖连接的稳定性,减少装置抖动的影响,转杆外端设置有限位盘防止机体行驶过程中支撑足脱落,并在内部设置有保护机构充分保护单片机。
14、2、该便于拆卸的仿生机器人,为了方便调试,设置有方便拆卸的单片机保护装置,设备在运行前通常需要对单片机进行烧写调试,需要连接主机与单片机进行,通过设置卡接形式的保护装置,装置四周可连接烧入器方便程序烧写,同时需要硬件维修时也便于将单片机从装置内部取出。
技术特征:
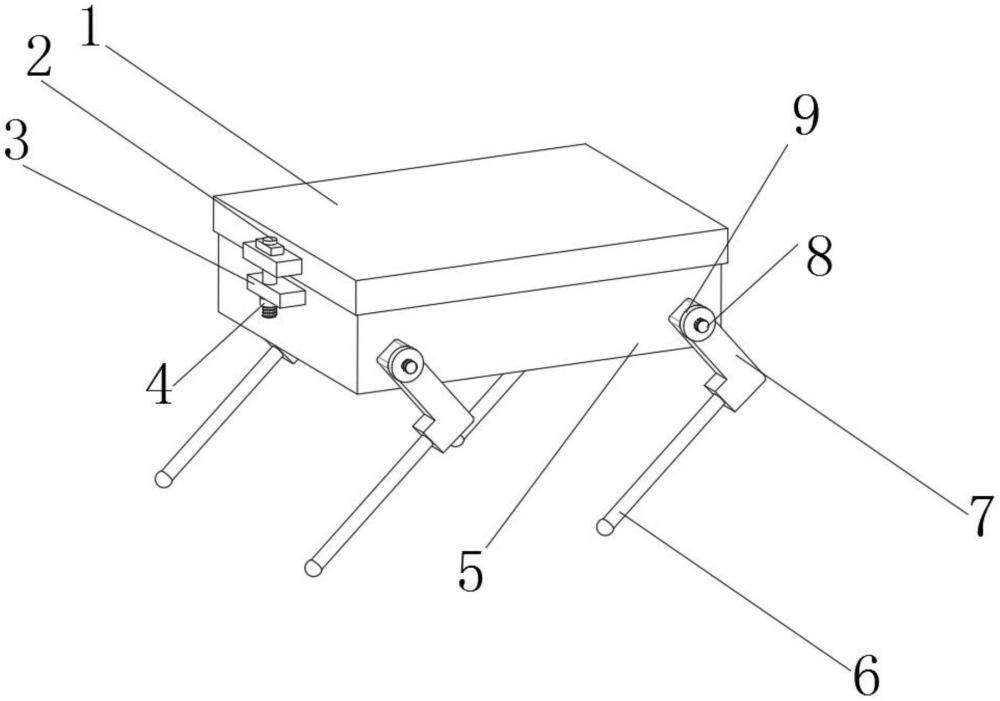
1.一种便于拆卸的仿生机器人,包括机箱(5),其特征在于:所述机箱(5)上方活动连接有机盖(1),所述机箱(5)两侧表面设置有连接座(7),所述连接座(7)内部套接有支撑足(6),所述连接座(7)轴心处固定连接有转杆(8),所述转杆(8)两端活动连接有限位盘(9),所述转杆(8)外表面固定安装有电机(10),所述转杆(8)一端固定设置有转杆帽(11),所述机箱(5)前侧表面固定安装有卡块(3),所述卡块(3)中心处活动连接有锁定杆(2),所述锁定杆(2)下端活动连接有限位帽(4),所述机箱(5)中部内表面上设置有处理器保护结构,所述机箱(5)内表面上一侧固定安装有电源保护壳(13),所述处理器保护结构包括:
2.根据权利要求1所述的一种便于拆卸的仿生机器人,其特征在于:所述卡块(3)数量设置为两个,其中一组卡块(3)固定安装于所述机盖(1)前侧外表面上,另一组卡块(3)固定安装于所述机箱(5)前侧外表面上,且所述卡块(3)中部都开设有与所述锁定杆(2)相适配的安装孔。
3.根据权利要求1所述的一种便于拆卸的仿生机器人,其特征在于:所述锁定杆(2)下端开设有与所述限位帽(4)相适配的螺纹,所述转杆(8)两端开设有与所述限位盘(9)相适配的螺纹。
4.根据权利要求1所述的一种便于拆卸的仿生机器人,其特征在于:所述支撑足(6)数量设置为四个,两个为一组,且两组所述支撑足(6)以所述机箱(5)正面中线为对称轴对称设置于所述机箱(5)两侧。
5.根据权利要求1所述的一种便于拆卸的仿生机器人,其特征在于:所述支撑足(6)底端外表面设置有防摩擦橡皮。
6.根据权利要求1所述的一种便于拆卸的仿生机器人,其特征在于:所述电源保护壳(13)外表面开设有电源线孔。
7.根据权利要求1所述的一种便于拆卸的仿生机器人,其特征在于:所述机箱(5)上沿四周开设有卡槽(14),所述机盖(1)下沿四周设置有与所述卡槽(14)相适配的卡条。
8.根据权利要求1所述的一种便于拆卸的仿生机器人,其特征在于:所述空心套杆(15)侧面开设有与所述固定块(18)相适配的插槽。
技术总结
本技术涉及机器人技术领域,且公开了一种便于拆卸的仿生机器人,该便于拆卸的仿生机器人,包括机箱,所述机箱上方活动连接有机盖,所述机箱两侧表面设置有连接座,所述连接座内部套接有支撑足,所述连接座轴心处固定连接有转杆,所述转杆两端活动连接有限位盘,机箱前侧表面固定安装有卡块,卡块中心处活动连接有锁定杆,锁定杆下端活动连接有限位帽,机箱中部内表面上设置有处理器保护结构。该便于拆卸的仿生机器人,通过卡条卡紧与锁定杆配合连接机箱机盖,保证装置在复杂环境下的工作稳定性,通过设置便于拆卸的处理器保护结构,通过插杆与空心套杆卡接保证保护板有效保护单片机电路,同时方便对内部单片机的调试与维护。
技术研发人员:朱家慧,谷锦瑞,王新辉,王新帅
受保护的技术使用者:天津萨米特科技发展有限公司
技术研发日:20230810
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!