一种搬运机器人的制作方法
本技术涉及搬运机器人领域,尤其涉及一种搬运机器人。
背景技术:
1、搬运机器人是可以进行自动化搬运作业的工业机器人,搬运机器人可以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动,并且,运用于自动化流水线上,而目前的搬运机器人其规格是固定的,在对部分长度较长的物件进行搬运工作时,搬运机器人顶端的承载面积不足,导致物件与搬运机器人之间的接触面积较小,会影响到物件放置的稳定性,存在物件掉落的情况,不利于进行物件的搬运工作,因此,有必要提供一种新的搬运机器人解决上述技术问题。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种搬运机器人。
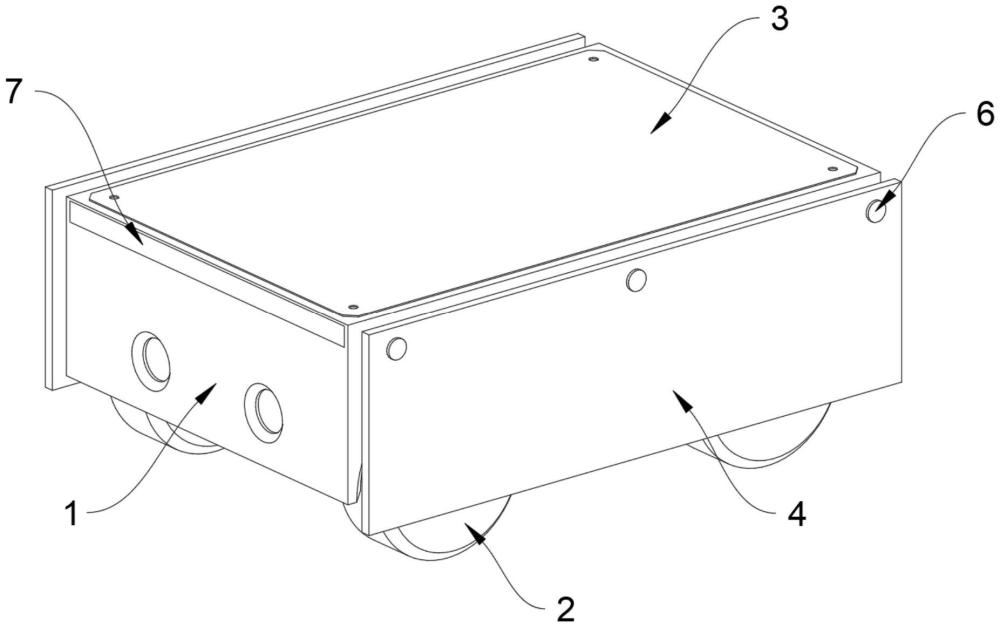
2、本实用新型提供的搬运机器人包括:机器人机体,机器人机体的底端对称固定安装有驱动装置,机器人机体的顶端固定安装有顶板,机器人机体的两侧均通过连接块固定安装有侧防板,机器人机体的顶端内部安装有扩展机构,扩展机构包括:固定箱,固定箱固定安装在机器人机体的顶端内部,固定箱的内部固定安装有安装杆。
3、优选的,侧防板上等距螺纹连接有连接螺栓,且连接螺栓的一端穿过侧防板的侧壁与机器人机体的侧壁螺纹连接,侧防板和机器人机体之间均设套管,且套管套接在连接螺栓的外圈。
4、优选的,扩展机构还包括:蜗轮,蜗轮固定安装在安装杆的一端,固定箱的内部底端转动连接有蜗杆,固定箱的一侧固定安装有工作电机,工作电机的输出端穿过固定箱的侧壁与蜗杆的一端固定连接,安装杆上转动安装有锥齿轮组,锥齿轮组的中部与蜗轮之间固定连接,锥齿轮组的两端均固定安装有第一同步轮,机器人机体的内部均对称转动连接有传动杆,传动杆上均固定安装有第二同步轮,第一同步轮和第二同步轮的外圈均套接有传动带,传动杆的两端均固定安装有转动齿轮,机器人机体的顶端对称滑动连接有扩展板,两个扩展板的下表面对称固定安装有传动齿条,且传动齿条与转动齿轮之间啮合连接。
5、优选的,扩展板的两端均开设有导槽,且机器人机体的顶端开设有与扩展板两端导槽之间滑动连接的凸块。
6、优选的,扩展板的上表面固定安装有防护板。
7、优选的,固定箱的两侧开设有与传动带配合传动的穿孔。
8、优选的,安装杆呈十字设置。
9、优选的,两个第二同步轮呈对角设置。
10、与相关技术相比较,本实用新型提供的搬运机器人具有如下有益效果:
11、在正常对物件进行运载时,机器人机体顶端的承载面即可完成任务,当需要对长物件进行运载时,设备即可通过扩展机构将机器人机体顶端的承载面积进行扩展,以便增加物件与设备之间的接触面积,使得物件在设备上放置的更加的稳定,更加方便设备对物件的运输,此搬运机器人可以通过设备上设有的扩展机构增加设备的承载面积,可以对不同长度的物件进行搬运,增加物件的放置稳定性,更加方便设备的搬运工作。
技术特征:
1.一种搬运机器人,其特征在于,包括:机器人机体(1),所述机器人机体(1)的底端对称固定安装有驱动装置(2),所述机器人机体(1)的顶端固定安装有顶板(3),所述机器人机体(1)的两侧均通过连接块(5)固定安装有侧防板(4),所述机器人机体(1)的顶端内部安装有扩展机构(7),所述扩展机构(7)包括:固定箱(8),所述固定箱(8)固定安装在机器人机体(1)的顶端内部,所述固定箱(8)的内部固定安装有安装杆(9)。
2.根据权利要求1所述的搬运机器人,其特征在于,所述侧防板(4)上等距螺纹连接有连接螺栓(6),且连接螺栓(6)的一端穿过侧防板(4)的侧壁与机器人机体(1)的侧壁螺纹连接,所述侧防板(4)和机器人机体(1)之间均设套管(23),且套管(23)套接在连接螺栓(6)的外圈。
3.根据权利要求1所述的搬运机器人,其特征在于,所述扩展机构(7)还包括:蜗轮(10),所述蜗轮(10)固定安装在安装杆(9)的一端,所述固定箱(8)的内部底端转动连接有蜗杆(11),所述固定箱(8)的一侧固定安装有工作电机(12),所述工作电机(12)的输出端穿过固定箱(8)的侧壁与蜗杆(11)的一端固定连接,所述安装杆(9)上转动安装有锥齿轮组(13),所述锥齿轮组(13)的中部与蜗轮(10)之间固定连接,所述锥齿轮组(13)的两端均固定安装有第一同步轮(14),所述机器人机体(1)的内部均对称转动连接有传动杆(15),所述传动杆(15)上均固定安装有第二同步轮(17),所述第一同步轮(14)和第二同步轮(17)的外圈均套接有传动带(18),所述传动杆(15)的两端均固定安装有转动齿轮(19),所述机器人机体(1)的顶端对称滑动连接有扩展板(21),两个所述扩展板(21)的下表面对称固定安装有传动齿条(20),且传动齿条(20)与转动齿轮(19)之间啮合连接。
4.根据权利要求3所述的搬运机器人,其特征在于,所述扩展板(21)的两端均开设有导槽,且机器人机体(1)的顶端开设有与扩展板(21)两端导槽之间滑动连接的凸块。
5.根据权利要求3所述的搬运机器人,其特征在于,所述扩展板(21)的上表面固定安装有防护板(22)。
6.根据权利要求3所述的搬运机器人,其特征在于,所述固定箱(8)的两侧开设有与传动带(18)配合传动的穿孔(16)。
7.根据权利要求3所述的搬运机器人,其特征在于,所述安装杆(9)呈十字设置。
8.根据权利要求3所述的搬运机器人,其特征在于,两个所述第二同步轮(17)呈对角设置。
技术总结
本技术涉及搬运机器人领域,尤其涉及一种搬运机器人。所述搬运机器人包括机器人机体,机器人机体的底端对称固定安装有驱动装置,机器人机体的顶端固定安装有顶板,机器人机体的两侧均通过连接块固定安装有侧防板,机器人机体的顶端内部安装有扩展机构,扩展机构包括:固定箱,固定箱固定安装在机器人机体的顶端内部,固定箱的内部固定安装有安装杆,侧防板上等距螺纹连接有连接螺栓,且连接螺栓的一端穿过侧防板的侧壁与机器人机体的侧壁螺纹连接,本技术提供的搬运机器人可以通过设备上设有的扩展机构增加设备的承载面积,可以对不同长度的物件进行搬运,增加物件的放置稳定性,更加方便设备的搬运工作。
技术研发人员:王超,李锋,桂鹤阳,关腾,张宁
受保护的技术使用者:陕西零号机器人科技有限公司
技术研发日:20230815
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!