一种机器狗的爬行腿组件的制作方法
【】本技术涉及机械,具体涉及一种机器狗的爬行腿组件。
背景技术
0、
背景技术:
1、机器狗是一种仿生机器人,通过驱动爬行腿组件实现行走、跑步和躲避障碍等动作。
2、现有的机器狗通常将爬行腿组件设置在两个同轴的电机之间,通过电机从而实现爬行腿组件之间抬腿,配合完成步行任务和转向任务。公告号cn214451424u的中国专利文件公开了一种智能仿生狗,其第一摆杆和第二摆杆位于第一电机和第二电机之间,然而该结构会导致其中一个电机会外露在机械腿组件的外侧。外露的电机会影响机器狗的空间利用效率,使得机器狗在尺寸上需要有额外的空间来容纳该电机,限制了机器狗的整体尺寸,增加了机器狗的整体体积。
技术实现思路
0、
技术实现要素:
1、本实用新型的目的在于提供一种能增加空间利用效率的机器狗爬行腿组件,从而解决上述问题。
2、为了解决上述技术问题,本实用新型提供如下技术方案:一种机器狗的爬行腿组件,包括壳体,所述壳体上设有转动架,所述转动架上设有输出轴均向壳体外侧伸出的第一电机和第二电机,且所述转动架连接有能驱动转动架绕着x轴转动的第三电机,所述爬行腿组件还包括大臂、小臂、第一摆杆、以及转动安装在转动架上并能绕着y轴摆动的转动块,所述转动块与第二电机之间连接有能够带动转动块摆动的传动机构,所述大臂的上部与第一电机的输出端相连接,且所述大臂的下部与小臂铰接,所述小臂的底部连接有脚垫,所述脚垫底部下端设有从前侧延伸到后侧的第一弧面;且所述小臂的上端具有延伸部,所述第一摆杆的一端与延伸部铰接,且所述第一摆杆的另一端与转动块铰接,所述转动块与大臂的上部转动连接,从而使得大臂、延伸部、第一摆杆、以及转动块四者构成四边形结构。
3、作为本实用新型进一步的优化方案,所述大臂包括第一臂杆和第二臂杆,所述第一臂杆和第二臂杆固定连接,第一电机的输出端连接有转动座,所述转动座与第一臂杆固定连接,所述转动块设在第一臂杆和第二臂杆之间。
4、作为本实用新型进一步的优化方案,所述转动块上设有第一安装孔,所述第一臂杆和第二臂杆之间设有穿设第一安装孔的转动轴。
5、作为本实用新型进一步的优化方案,所述传动机构包括和第二电机输出端连接的第二摆杆、以及第三摆杆,所述第三摆杆一端与第二摆杆铰接,且所述第三摆杆另一端与转动块铰接。
6、作为本实用新型进一步的优化方案,所述脚垫具有向左右两侧凸出的凸出部,所述凸出部上设有相对脚垫向外倾斜的倾斜面,所述倾斜面与第一弧面之间设有过渡弧面。
7、作为本实用新型进一步的优化方案,所述脚垫上设有安装槽,所述小臂底部设有能插入安装槽的安装块。
8、作为本实用新型进一步的优化方案,所述安装块上设有第二安装孔,所述安装槽内设有能够在安装块插入安装槽时与第二安装孔连通的第三安装孔。
9、作为本实用新型进一步的优化方案,所述小臂底部的前部与后部均设有定位销,所述脚垫上设有与定位销相对应的定位槽。
10、作为本实用新型进一步的优化方案,所述过渡弧面为月牙状。
11、与现有技术相比,本实用新型有如下优点:
12、1、通过大臂、延伸部、第一摆杆、以及转动块之间构成四边形结构,使得第一电机和第二电机能共同配合驱动爬行腿组件的前后运动。因此,输出轴均向壳体外侧伸出的第一电机和第二电机能实现爬行腿组件的运动,增加空间利用效率。
13、2、通过转动轴、以及套设在转动轴上的转动块的设置,使得转动块不会跟随第一臂杆和第二臂杆的转动,而是跟随传动机构进行转动。
14、3、通过设置在脚垫底部下端且从前侧延伸到后侧的第一弧面,从而提高机器狗前后移动时爬行腿组件的平稳性;通过过渡弧面的设置,可以在不影响机器狗前后移动平稳性的同时,提高机器狗左右移动时的平稳性。
技术特征:
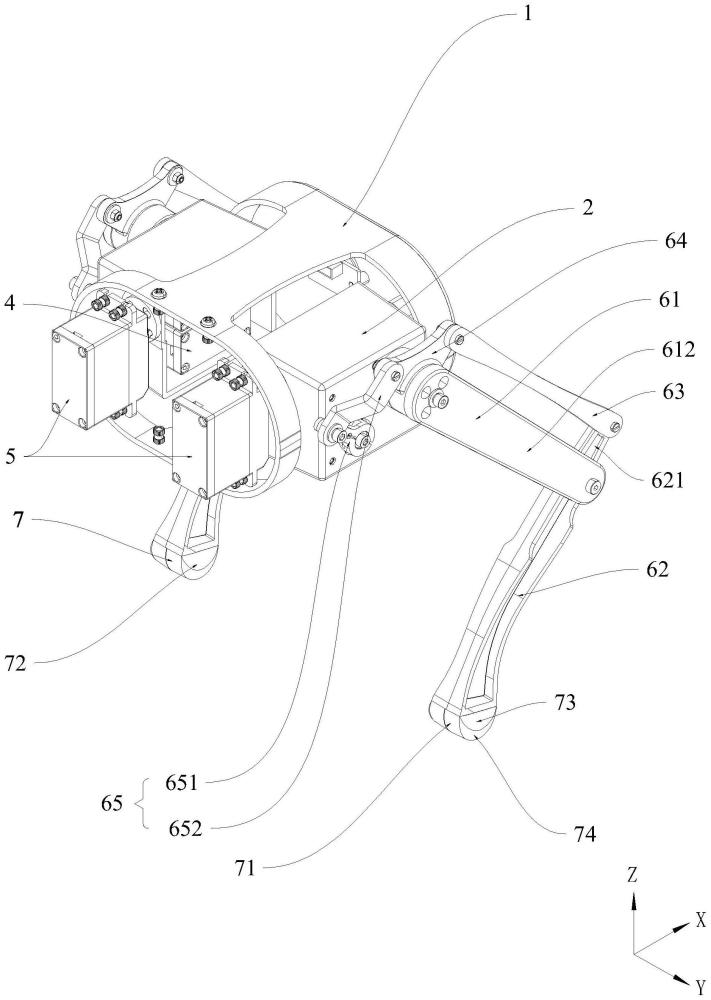
1.一种机器狗的爬行腿组件,其特征在于:包括壳体(1),所述壳体(1)上设有转动架(2),所述转动架(2)上设有输出轴均向壳体(1)外侧伸出的第一电机(3)和第二电机(4),且所述转动架(2)连接有能驱动转动架(2)绕着x轴转动的第三电机(5),所述爬行腿组件还包括大臂(61)、小臂(62)、第一摆杆(63)、以及转动安装在转动架(2)上并能绕着y轴摆动的转动块(64),所述转动块(64)与第二电机(4)之间连接有能够带动转动块(64)摆动的传动机构(65),所述大臂(61)的上部与第一电机(3)的输出端相连接,且所述大臂(61)的下部与小臂(62)铰接,所述小臂(62)的底部连接有脚垫(7),所述脚垫(7)底部下端设有从前侧延伸到后侧的第一弧面(71);且所述小臂(62)的上端具有延伸部(621),所述第一摆杆(63)的一端与延伸部(621)铰接,且所述第一摆杆(63)的另一端与转动块(64)铰接,所述转动块(64)与大臂(61)的上部转动连接,从而使得大臂(61)、延伸部(621)、第一摆杆(63)、以及转动块(64)四者构成四边形结构。
2.根据权利要求1所述的一种机器狗的爬行腿组件,其特征在于:所述大臂(61)包括第一臂杆(611)和第二臂杆(612),所述第一臂杆(611)和第二臂杆(612)固定连接,第一电机(3)的输出端连接有转动座(613),所述转动座(613)与第一臂杆(611)固定连接,所述转动块(64)设在第一臂杆(611)和第二臂杆(612)之间。
3.根据权利要求2所述的一种机器狗的爬行腿组件,其特征在于:所述转动块(64)上设有第一安装孔(641),所述第一臂杆(611)和第二臂杆(612)之间设有穿设第一安装孔(641)的转动轴(614)。
4.根据权利要求1所述的一种机器狗的爬行腿组件,其特征在于:所述传动机构(65)包括和第二电机(4)输出端连接的第二摆杆(651)、以及第三摆杆(652),所述第三摆杆(652)一端与第二摆杆(651)铰接,且所述第三摆杆(652)另一端与转动块(64)铰接。
5.根据权利要求1所述的一种机器狗的爬行腿组件,其特征在于:所述脚垫(7)具有向左右两侧凸出的凸出部(72),所述凸出部(72)上设有相对脚垫(7)向外倾斜的倾斜面(73),所述倾斜面(73)与第一弧面(71)之间设有过渡弧面(74)。
6.根据权利要求1或5所述的一种机器狗的爬行腿组件,其特征在于:所述脚垫(7)上设有安装槽(75),所述小臂(62)底部设有能插入安装槽(75)的安装块(622)。
7.根据权利要求6所述的一种机器狗的爬行腿组件,其特征在于:所述安装块(622)上设有第二安装孔(623),所述安装槽(75)内设有能够在安装块(622)插入安装槽(75)时与第二安装孔(623)连通的第三安装孔(76)。
8.根据权利要求1或5所述的一种机器狗的爬行腿组件,其特征在于:所述小臂(62)底部的前部与后部均设有定位销(624),所述脚垫(7)上设有与定位销(624)相对应的定位槽(77)。
9.根据权利要求5所述的一种机器狗的爬行腿组件,其特征在于:所述过渡弧面(74)为月牙状。
技术总结
本技术涉及一种机器狗的爬行腿组件,包括壳体,所述壳体上设有转动架,所述转动架上设有输出轴均向壳体外侧伸出的第一电机和第二电机,且所述转动架连接有能驱动转动架绕着X轴转动的第三电机,所述爬行腿组件还包括大臂、小臂、第一摆杆、以及转动块,所述转动块与第二电机之间连接有传动机构,所述大臂的上部与第一电机的输出端相连接,且大臂、延伸部、第一摆杆、以及转动块四者构成四边形结构。本技术的特点是:通过大臂、延伸部、第一摆杆、以及转动块之间构成四边形结构,使得输出轴均向壳体外侧伸出的第一电机和第二电机能实现爬行腿组件的运动,增加空间利用效率。
技术研发人员:王茂林,阎寒
受保护的技术使用者:金大智能创新科技(河北)有限公司
技术研发日:20230817
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!