一种管道巡检机器人的底盘总成的制作方法
本技术涉及管道巡检机器人,具体而言,涉及一种管道巡检机器人的底盘总成。
背景技术:
1、随着人们对电力需求的日益增长,我国水电站的数量和装机容量逐年提升,对于水电站的巡检需求也在不断扩大。在水电站日常巡检过程中,针对发电机组的离相封闭母线管道的维护与检修一直是巡检过程中的重点与难点。离相封闭母线管道作为环形贯通管道的一种,其独特的双管路、管套管结构,使得工人无法直接对管道内部环境进行目视观察,而传统人工拆解的检修方式存在设备伤害大、花费时间长、人力成本高等缺陷。
2、现有技术中,离相封闭母线管道有着大管套小管的复杂双管路结构。外管作为绝缘外壳,对离相封闭母线起保护、绝缘作用。绝缘外壳是一个直径为1.45m的铝管,其壁厚一般为6~10mm。导体的直径为0.9m。绝缘外壳与导体间存在绝缘子作为内部导体的支撑。每组绝缘子在管道长度方向上的间隔约2.6m,三个一组且互相以120°的角度分布。
3、在这种离相封闭母线管道的管道间隙,现有的机器人在这种高度下,根本无法携带合适的设备以及控制元件进行巡检。
技术实现思路
1、本实用新型的目的在于提供一种管道巡检机器人的底盘总成,该底盘总成可在环形管道用巡检机器人最高高度以及最长长度要求下实现巡检所需的供电以及控制布局,解决背景技术中所指出的问题。
2、本实用新型的实施例通过以下技术方案实现:一种管道巡检机器人的底盘总成,适用于管道巡检机器人,包括底盘机架、两组轮系单元以及机器人本体,所述机器人本体设置在底盘机架上;其中,
3、两组所述轮系单元转动设置于底盘机架的两侧,每组所述轮系单元均通过一组驱动电机驱动,所述驱动电机设于机器人本体内;
4、所述机器人本体内置控制舱以及电池仓,所述电池仓设于控制舱一侧,所述控制舱由分隔板划分为用于安装机器人总控制器的第一控制舱容纳空间以及用于安装机器人驱动模块的第二控制舱容纳空间,所述第一控制舱容纳控制设有总控制器接线空间,所述控制舱外侧预留有走线通道。
5、根据一种优选实施方式,所述机器人驱动模块包括分流板、降压模块、有刷电机组以及继电器组,所述分流板与电池仓内的电池相连,所述降压模块与分流板相连,所述有刷电机组与分流板相连,所述继电器组与总控制器相连,所述总控制器与降压模块相连。
6、根据一种优选实施方式,所述控制舱由控制舱第一侧板、控制舱背板、控制舱第二侧板、控制舱底板以及所述分隔板围合形成方形容置空间,该方形容置空间的前端以及顶端开口。
7、根据一种优选实施方式,所述电池仓设于控制舱背板相对的另一侧,所述分流板以及降压模块均设置在控制舱背板上,所述继电器组以及有刷电机组均设置在控制舱底板上,所述总控制器设置在分隔板上。
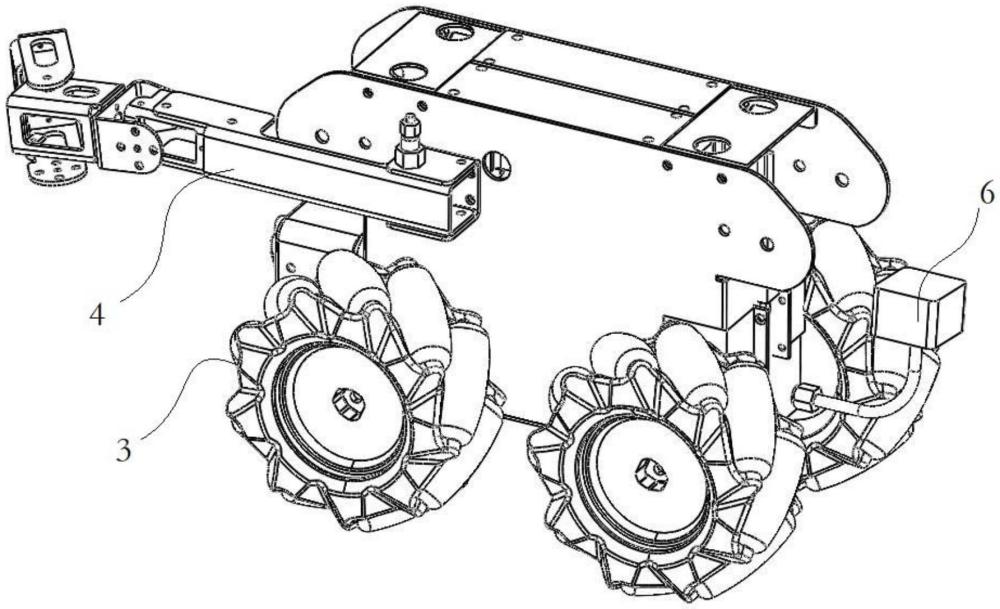
8、根据一种优选实施方式,所述机器人本体一侧设有机械臂。
9、根据一种优选实施方式,所述机器人本体前端设有摄像组件。
10、根据一种优选实施方式,所述机器人本体后端设有天线。
11、根据一种优选实施方式,所述轮系单元采用麦克纳姆轮。
12、本实用新型实施例一种管道巡检机器人的底盘总成的技术方案至少具有如下优点和有益效果:本实用新型所提供的底盘总成通过设置双层控制舱并于第一控制舱容纳控制设置总控制器接线空间以及控制舱外预留走线通道,各控制装置可以轻松地与机器人各功能零部件进行接线控制,可在环形管道用巡检机器人最高高度以及最长长度要求下实现巡检所需的供电以及控制布局。
技术特征:
1.一种管道巡检机器人的底盘总成,适用于管道巡检机器人,其特征在于,包括底盘机架、两组轮系单元以及机器人本体,所述机器人本体设置在底盘机架上;其中,
2.如权利要求1所述的管道巡检机器人的底盘总成,其特征在于,所述机器人驱动模块(2)包括分流板(203)、降压模块(204)、有刷电机组(205)以及继电器组(206),所述分流板(203)与电池(201)仓内的电池(201)相连,所述降压模块(204)与分流板(203)相连,所述有刷电机组(205)与分流板(203)相连,所述继电器组(206)与总控制器(202)相连,所述总控制器(202)与降压模块(204)相连。
3.如权利要求2所述的管道巡检机器人的底盘总成,其特征在于,所述控制舱(1)由控制舱第一侧板(102)、控制舱背板(101)、控制舱第二侧板(103)、控制舱底板(104)以及所述分隔板(105)围合形成方形容置空间,该方形容置空间的前端以及顶端开口。
4.如权利要求3所述的管道巡检机器人的底盘总成,其特征在于,所述电池(201)仓设于控制舱背板(101)相对的另一侧,所述分流板(203)以及降压模块(204)均设置在控制舱背板(101)上,所述继电器组(206)以及有刷电机组(205)均设置在控制舱底板(104)上,所述总控制器(202)设置在分隔板(105)上。
5.如权利要求1至4任一项所述的管道巡检机器人的底盘总成,其特征在于,所述机器人本体一侧设有机械臂(4)。
6.如权利要求5所述的管道巡检机器人的底盘总成,其特征在于,所述机器人本体前端摄像组件(5)。
7.如权利要求5所述的管道巡检机器人的底盘总成,其特征在于,所述机器人本体后端设有天线(6)。
8.如权利要求5所述的管道巡检机器人的底盘总成,其特征在于,所述轮系单元采用麦克纳姆轮(3)。
技术总结
本技术涉及管道巡检机器人技术领域,具体涉及一种管道巡检机器人的底盘总成,适用于管道巡检机器人,包括底盘机架、两组轮系单元以及机器人本体,所述机器人本体设置在底盘机架上;其中,两组所述轮系单元转动设置于底盘机架的两侧,每组所述轮系单元均通过一组驱动电机驱动,所述驱动电机设于机器人本体内;所述机器人本体内置控制舱以及电池仓,所述电池仓设于控制舱一侧,所述控制舱由分隔板划分为用于安装机器人总控制器的第一控制舱容纳空间以及用于安装机器人驱动模块的第二控制舱容纳空间。本技术所提供的底盘总成可在环形管道用巡检机器人最高高度以及最长长度要求下实现巡检所需的供电以及控制布局。
技术研发人员:李辉,蹇万祥,刘细辉,马静,罗勇,王应,黄世超,林帅,汪军如,刘丁铭,董旭,苗彩凤
受保护的技术使用者:雅砻江流域水电开发有限公司
技术研发日:20230822
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!