一种工业机器人搬运小车的制作方法
本技术涉及工业机器人,具体为一种工业机器人搬运小车。
背景技术:
1、随着市场上对于小批量、多批次、定制化生产需求的逐步上升,机器人的发展愈发快速,机器人安全、易用,能够灵活调节,可满足从工业到商业、医疗等多个领域,包括汽车、五金、3c、半导体、纺织、食品等行业需求,能够胜任拾取、码垛、搬运、上下料、检测、装配、涂胶、焊接、打磨等众多工作。
2、根据中国专利公开号cn 219339494 u公开的《一种工业机器人搬运小车》,该装置包括可移动的底座、承载平台、升降机构以及取料组件,承载平台设于底座的上方,升降机构的一端与底座连接,另一端与一个承载平台连接,用于驱动承载平台远离或靠近底座,取料组件与承载平台滑动连接,可在水平面内伸缩。本实用新型的工业机器人搬运小车通过取料组件对接机器人并搬运机器人至承载平台上,提高了搬运效率。同时,避免了机器人在人工搬运过程中发生磕碰,降低了机器人损坏的风险。
3、但是该装置取料机构通过伸缩卡持臂对工业机器人进行夹持搬运,卡持臂伸出的长度过长,卡持臂会发生夹持不稳工业机器人,导致工业机器人掉落的情况,对工业机器人造成损坏,由此可见,我们亟需一种工业机器人搬运小车,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人搬运小车,以解决上述背景技术中提出的卡持臂伸出的长度过长,卡持臂会夹持不稳工业机器人,导致工业机器人掉落的情况,对工业机器人造成损坏的问题。
2、为了解决上述技术问题,本实用新型提供如下技术方案:一种工业机器人搬运小车,包括夹持机构,所述夹持机构的外部设置有升降机构。
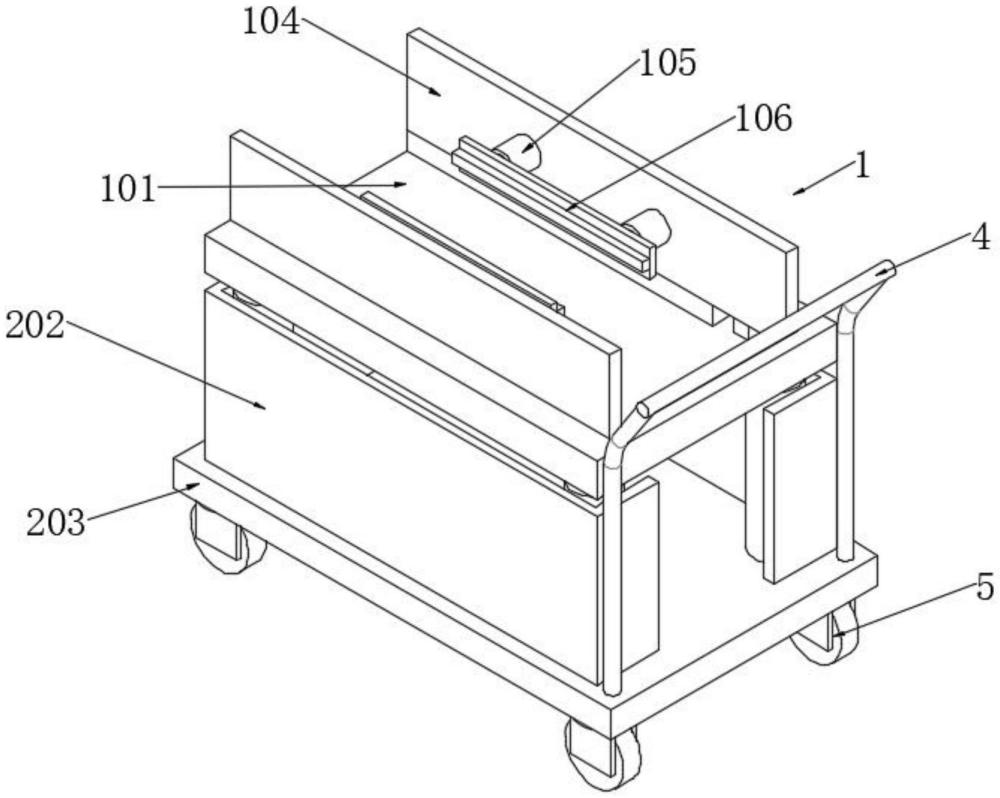
3、所述夹持机构包括放置板,所述放置板的顶部固定安装有安装板,所述安装板的左侧开设有滑道,所述滑道的内部设置有滑块,所述滑块的顶部固定安装有固定板,所述固定板的左侧固定安装有第一电动伸缩杆,所述第一电动伸缩杆的左侧固定安装有夹持板,所述滑块的内部设置有移动组件。
4、优选的,所述移动组件包括丝杆,所述丝杆的外表面安装有连接板,所述连接板的背面设置有步进电机。
5、优选的,所述丝杆设置在滑块的内部,所述连接板固定安装在滑槽的内壁底部,所述丝杆的背面贯穿连接板并延伸至步进电机的输出轴。
6、优选的,所述夹持板设置有两个,两个所述夹持板位于放置板的顶部呈对称分布。
7、优选的,所述升降机构包括第二电动伸缩杆,所述第二电动伸缩杆的外部设置有防护板,所述第二电动伸缩杆的底部固定安装有承载板。
8、优选的,所述第二电动伸缩杆固定安装在放置板的底部,所述承载板的顶部设置有推把,所述承载板的底部设置有万向轮。
9、优选的,所述第二电动伸缩杆设置有两个,两个所述第二电动伸缩杆位于放置板的底部呈对称分布。
10、与现有技术相比,本实用新型所达到的有益效果是:
11、第一、本实用新型当需要搬运工业机器人时,放置板调整到与放置工业机器人的工作台同一高度,步进电机通电带动丝杆外部的滑块向前移动,使两个夹持板移动到工业机器人的两侧通过第一电动伸缩杆,使两个夹持板夹住工业机器人,步进电机在带动丝杆时滑块向后移动,把工业机器人夹持回到放置板上,通过夹持板可以对工业机器人进行固定,达到对工业机器人进行搬运并夹持固定住的效果。
12、第二、本实用新型在对工业机器人进行搬运时,为了方便搬运需要调整放置板与放置工业机器人的工作台同一高度,方便滑块移动,对工业机器人进行搬运,在放置板的底部固定安装有四个第二电动伸缩杆,四个第二电动伸缩杆的底部安装有承载板,可以通过四个第二电动伸缩杆调节放置板的高度,方便夹持机构对工业机器人进行搬运,在第二电动伸缩杆的外部设置有防护板,可以对第二电动伸缩杆进行防护,在承载板的底部安装有四个万向轮,可以方便推车移动方向,在承载板的顶部安装有推把,方便推动推车,达到对推车高度进行调节方便夹持机构搬运工业机器人的效果。
技术特征:
1.一种工业机器人搬运小车,包括夹持机构(1),其特征在于:所述夹持机构(1)的外部设置有升降机构(2);
2.根据权利要求1所述的一种工业机器人搬运小车,其特征在于:所述移动组件(3)包括丝杆(301),所述丝杆(301)的外表面安装有连接板(302),所述连接板(302)的背面设置有步进电机(303)。
3.根据权利要求2所述的一种工业机器人搬运小车,其特征在于:所述丝杆(301)设置在滑块(103)的内部,所述连接板(302)固定安装在滑槽的内壁底部,所述丝杆(301)的背面贯穿连接板(302)并延伸至步进电机(303)的输出轴。
4.根据权利要求1所述的一种工业机器人搬运小车,其特征在于:所述夹持板(106)设置有两个,两个所述夹持板(106)位于放置板(101)的顶部呈对称分布。
5.根据权利要求1所述的一种工业机器人搬运小车,其特征在于:所述升降机构(2)包括第二电动伸缩杆(201),所述第二电动伸缩杆(201)的外部设置有防护板(202),所述第二电动伸缩杆(201)的底部固定安装有承载板(203)。
6.根据权利要求5所述的一种工业机器人搬运小车,其特征在于:所述第二电动伸缩杆(201)固定安装在放置板(101)的底部,所述承载板(203)的顶部设置有推把(4),所述承载板(203)的底部设置有万向轮(5)。
7.根据权利要求5所述的一种工业机器人搬运小车,其特征在于:所述第二电动伸缩杆(201)设置有两个,两个所述第二电动伸缩杆(201)位于放置板(101)的底部呈对称分布。
技术总结
本技术涉及工业机器人技术领域,且公开了一种工业机器人搬运小车,包括夹持机构,夹持机构的外部设置有升降机构,夹持机构包括放置板,放置板的顶部固定安装有安装板,安装板的左侧开设有滑道,滑道的内部设置有滑块,滑块的顶部固定安装有固定板,固定板的左侧固定安装有第一电动伸缩杆,第一电动伸缩杆的左侧固定安装有夹持板。该工业机器人搬运小车,当需要搬运工业机器人时,使两个夹持板移动到工业机器人的两侧,通过第一电动伸缩杆,使两个夹持板夹住工业机器人,步进电机在带动丝杆时滑块向后移动,把工业机器人夹持回到放置板上,达到对工业机器人进行搬运并夹持固定住的效果。
技术研发人员:罗玉鹏,沙进,罗俊豪
受保护的技术使用者:泰州诺恒机械有限公司
技术研发日:20230828
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!