一种铁磁壁面高越障性能机器人
本技术涉及一种铁磁壁面高越障性能机器人,属于机器人。
背景技术:
1、磁吸附爬壁机器人属于特种机器人,多用于恶劣、危险、极限工况下,在导磁壁面上进行如探测、检修、焊接、或打磨等特定作业,在一些高空立面工作场合,例如船舶、风电、火电等,人类难以完成高难度的任务,这就需要能够吸附在壁面上工作的机器人。目前磁吸附机器人已在核工业、石化工业、建筑工业、消防部门、造船业等以钢结构为主的生产施工中得到广泛的应用。但大多磁吸附爬壁机器人只能应用于平坦的铁磁壁面上,不能通过壁面上具有多种复杂障碍的场合。因此,有必要对现有技术的缺陷进行改进。
技术实现思路
1、本实用新型的目的在于提供一种铁磁壁面高越障性能机器人,通过在安装有永磁体的履带机器人上设置锁定销组件以及与之配合的锁定模块和解锁模块,根据爬壁过程中遇到的障碍通过锁定模块锁定相邻两个所述履带链节之间的夹角来调节所述单段爬壁机器人履带模块的整体折角直至所述履带模块越过该障碍,所述解锁模块对相邻两个所述履带链节之间锁定的夹角进行解锁,克服了其他爬壁机器人只能适应平坦铁磁壁面的缺点,可以越过铁磁壁面上的多种障碍。
2、为达到上述目的,本实用新型是采用下述技术方案实现的。
3、一种铁磁壁面高越障性能机器人,单段爬壁机器人包括:履带模块、主体驱动模块、锁定模块以及解锁模块;
4、所述履带模块包括转动连接的若干履带链节以及设置在所述履带链节上的锁定解锁组件和永磁体;所述锁定解锁组件包括将相邻两个履带链节锁定为不同角度的第一锁定销和第二锁定销,所述第一锁定销和第二锁定销曲线滑动设置在所述履带链节上,所述第一锁定销和第二锁定销分别具有锁定状态和解锁状态;
5、所述主体驱动模块设置在所述履带模块内侧空间中,其包括主体板组件以及设置在所述主体板组件上的驱动模块,所述驱动模块用于驱动所述履带模块运动;
6、所述锁定模块包括锁定板,所述锁定板设置在所述主体板组件上,其具有初始位置、第一锁定位置以及第二锁定位置,所述锁定板为第一锁定位置时所述第一锁定销处于锁定状态,所述锁定板为第二锁定位置时所述第二锁定销处于锁定状态;
7、所述解锁模块包括第一解锁板和第二解锁板,所述第一解锁板和第二解锁板设置在所述履带模块外侧并连接所述主体板组件,所述第一解锁板推动处于锁定状态的第一锁定销进入解锁状态,所述第二解锁板推动处于锁定状态的第二锁定销进入解锁状态。
8、以上技术方案中,所述履带模块头部接触到障碍时,根据障碍的形状与大小确定所述履带模块需要呈现的形状,并通过设置并锁定相邻两个所述履带链节之间的夹角来实现所述履带模块所需呈现的形状,通过所述锁定板的移动对所述履带链节上的第一或第二锁定销进行推动,使得所述第一或第二锁定销进入锁定状态,以实现对相邻两个所述履带链节之间夹角的锁定;当所述履带模块尾部越过该障碍时,所述第一或第二解锁板对处于锁定状态的第一或第二锁定销进行推动,使得所述第一或第二锁定销进入解锁状态,以实现对相邻两个所述履带链节之间的夹角解锁,该爬壁机器人克服了其他爬壁机器人只能适应平坦铁磁壁面的缺点,可以越过铁磁壁面上的多种障碍,采用履带式爬壁机器人整体呈柔性状态,更增加了该爬壁机器人的适应性和灵活性。
9、可选地,所述锁定解锁组件还包括第一锁定解锁凸台和第二锁定解锁凸台、第一锁定槽和第二锁定槽以及曲线形状的第一锁定解锁槽和第二锁定解锁槽;
10、所述第一锁定解锁凸台和第二锁定解锁凸台分别设置在所述履带链节上的两侧,所述第一锁定解锁槽和第二锁定解锁槽分别设置在所述第一锁定解锁凸台和第二锁定解锁凸台上,所述第一锁定销滑动设置在所述第一锁定解锁槽上,所述第二锁定销滑动设置在所述第二锁定解锁槽上,所述第一锁定槽和第二锁定槽设置在所述履带链节两端。
11、可选地,所述第一锁定销上设置有第一锁定块、第一锁定轴和第一解锁轴,所述第二锁定销上设置有第二锁定块、第二锁定轴和第二解锁轴;
12、所述第一锁定销的锁定状态为所述第一锁定块结合所述第一锁定槽,所述第一锁定销的解锁状态为所述第一锁定块脱离所述第一锁定槽;
13、所述第二锁定销的锁定状态为所述第二锁定块结合所述第二锁定槽,所述第二锁定销的解锁状态为所述第二锁定块脱离所述第二锁定槽;
14、所述锁定板由初始位置移动至第一锁定位置时,推动所述第一锁定销由履带链节内侧滑动至外侧,所述第一锁定块移动至与所述第一锁定槽结合,进入所述第一锁定销的锁定状态;所述锁定板由初始位置移动至第二锁定位置时,推动所述第二锁定销由履带链节内侧滑动至外侧,所述第二锁定块移动至与所述第二锁定槽结合,进入所述第二锁定销的锁定状态;
15、所述第一解锁板推动所述第一锁定销由履带链节外侧滑动至内侧,所述第一锁定块脱离所述第一锁定槽,进入所述第一锁定销的解锁状态;所述第二解锁板推动所述第二锁定销由履带链节外侧滑动至内侧,所述第二锁定块脱离所述第二锁定槽,进入所述第二锁定销的解锁状态。
16、可选地,所述主体板组件包括前段主体板、中段主体板以及后段主体板,所述中段主体板连接所述前段主体板以及所述后段主体板;
17、所述驱动模块包括驱动电机架、驱动电机组件、前驱动传动组件、前驱动链轮组件、后驱动传动组件以及后驱动链轮组件;
18、所述驱动电机架设置在所述前段主体板上,所述驱动电机组件设置在所述驱动电机架上,所述驱动电机组件包括驱动电机以及驱动电机输出轴;
19、所述前驱动传动组件和前驱动链轮组件设置在所述前段主体板上,所述前驱动链轮组件包括前驱动轴以及两个前驱动链轮,两个所述前驱动链轮设置在所述前驱动轴两端并设置在所述前段主体板两侧,所述前驱动传动组件分别连接所述驱动电机输出轴和前驱动轴,两个所述前驱动链轮分别与所述履带链节啮合;
20、所述后驱动传动组件和后驱动链轮组件设置在所述后段主体板上,所述后驱动链轮组件包括后驱动轴以及两个后驱动链轮,两个所述后驱动链轮设置在所述后驱动轴两端并设置在所述后段主体板两侧,所述后驱动传动组件分别连接所述后段主体板和后驱动轴,两个所述后驱动链轮分别与所述履带链节啮合。
21、可选地,所述前驱动传动组件包括驱动齿轮以及传动齿轮,所述驱动齿轮连接所述驱动电机输出轴,所述传动齿轮设置在所述前驱动轴一端并设置在该端所述前驱动链轮的内侧,所述传动齿轮与所述驱动齿轮啮合;
22、所述后驱动传动组件包括连接所述后段主体板的两个轴承,两个所述轴承分别设置在所述后驱动轴两端并设置在两个所述后驱动链轮的内侧。
23、可选地,所述锁定模块设置在所述前段主体板上,所述锁定模块还包括锁定电机架、锁定电机组件与锁定传动组件,所述锁定电机组件设置在所示锁定电机架上,所述锁定电机组件包括锁定电机与锁定电机输出轴;
24、所述锁定传动组件包括锁定齿轮、锁定齿条以及两根锁定轴,所述锁定齿轮连接所述锁定电机输出轴,所述锁定齿条与所述锁定齿轮啮合,所述锁定齿条设置在所述锁定板上,所述锁定板滑动设置在两根所述锁定轴上,所述锁定齿条与所述锁定齿轮啮合转动带动所述锁定板由初始位置朝向所述第一锁定位置或第二锁定位置移动。
25、可选地,所述解锁模块连接所述后驱动轴两端并接触所述履带模块尾部外侧,所述解锁模块结合所述后驱动轴形成四边形框,所述第一解锁板和第二解锁板分别设置在平行于所述后驱动轴的边框上,所述第一解锁板的设置位置对应所述第一锁定销转动至履带链节外侧时所述第一解锁轴的位置,所述第二解锁板的设置位置对应所述第二锁定销转动至履带链节外侧时所述第二解锁轴的位置。
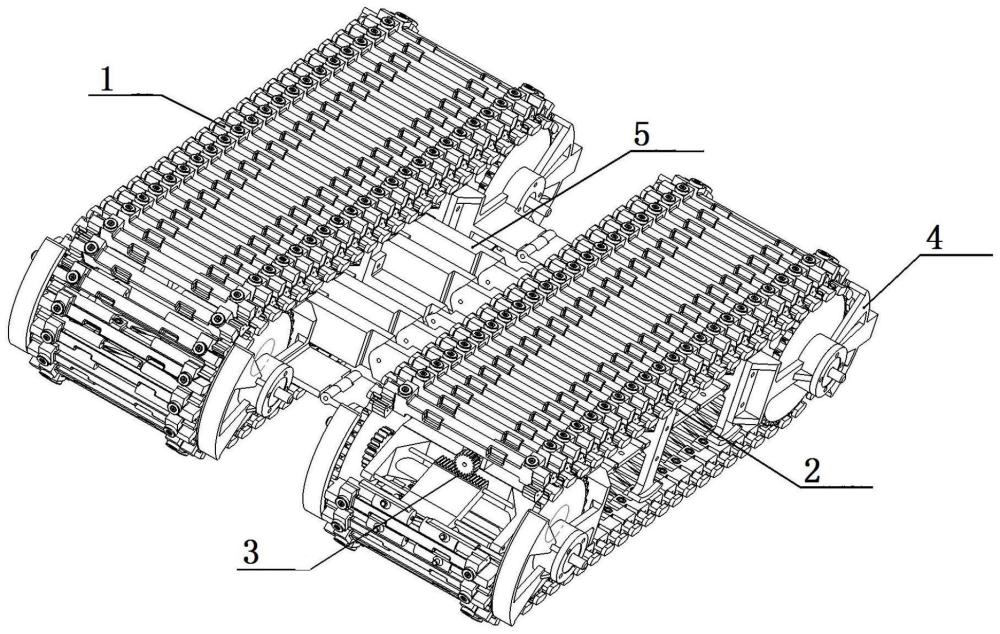
26、可选地,多段爬壁机器人包括若干结构相同的单段爬壁机器人以及连接所述单段爬壁机器人的连接模块,所述连接模块包括若干连接板;
27、所述中段主体板两侧设置有若干侧辅助板,所述单段爬壁机器人的侧辅助板分别连接所述连接板,所述单段爬壁机器人之间对应的侧辅助板之间通过对应的连接板转动连接。
28、以上技术方案中,所述单段爬壁机器人之间通过连接板转动连接,所述单段爬壁机器人之间可呈多种夹角,可以实现爬壁过程中多种作业形式及越障形式的需要。
29、可选地,所述单段爬壁机器人的前驱动链轮以及后驱动链轮的外侧分别设置有与其大小、形状相适应的前轮侧辅助板和后轮侧辅助板,所述后轮侧辅助板连接所述解锁模块,所述单段爬壁机器人的前轮侧辅助板和后轮侧辅助板分别连接所述连接板,所述单段爬壁机器人之间对应的前轮侧辅助板之间以及后轮侧辅助板之间通过对应的连接板转动连接。
30、可选地,所述第一锁定销为0度锁定销,将相邻的所述履带链节之间的角度锁定为0度,所述第二锁定销为6度锁定销,将相邻的所述履带链节之间的角度锁定为6度。
31、与现有技术相比,本实用新型所达到的有益效果:
32、1、通过锁定模块以及解锁模块对设置在所述履带链节上的第一、第二锁定销的锁定与解锁,实现了相邻两个所述履带链节之间的夹角的调节,从而实现了对履带模块整体形状的调节,克服了其他爬壁机器人只能适应平坦铁磁壁面的缺点,可以越过铁磁壁面上的多种障碍;
33、2、该高越障性能机器人采用模块化设计,方便维修且节约成本;
34、3、采用履带式爬壁机器人使得该高越障性能机器人整体呈柔性状态,更增加了该高越障性能机器人在爬壁越障过程中的适应性和灵活性;
35、4、单段爬壁机器人通过连接模块互相转动连接形成多段爬壁机器人,所述单段爬壁机器人之间可呈多种夹角,可以实现爬壁过程中多种作业形式及越障形式的需要。
- 还没有人留言评论。精彩留言会获得点赞!