一种伸缩方向盘及清洁机器人的制作方法
本技术涉及清洁设备,尤其是涉及一种伸缩方向盘及清洁机器人。
背景技术:
1、方向盘是清洁机器人的重要部件,操作者能够通过方向盘控制清洁机器人实现转向。随着自动化技术和人工智能的发展,自动驾驶技术迅速发展。对于自动驾驶的清洁机器人,在对地面进行清洁的过程中,不需要人工干涉,但是当清洁机器人出现故障或者需要快速转场时,需要人工驾驶机器人到指定位置。
2、现有的车辆中,存在可伸缩的方向盘,当不需要使用方向盘时,使方向盘处于缩回位置,当需要使用方向盘时,使方向盘处于伸出位置,为了在人工驾驶时增加驾驶手感,往往在方向盘的方向转轴上设置盘式阻尼器,但是当方向盘从伸出位置到缩回位置的过程中,方向盘只是在直线移动,方向盘的角度是不变的,因此在方向盘缩回时,需要将方向盘回正,使后续的自动驾驶操作不便。
3、但是,在方向盘缩回的过程中,由于盘式阻尼器为方向盘提供转动阻尼力,使方向盘回正存在阻尼力,回正不方便且影响回正效率和效果。
技术实现思路
1、本实用新型的目的在于提供一种伸缩方向盘及清洁机器人,以解决在方向盘缩回的过程中,盘式阻尼器为方向盘提供转动阻尼力,使方向盘回正存在阻尼力,回正不方便且影响回正效率和效果的技术问题。
2、本实用新型提供的一种伸缩方向盘,包括:基座、机架、转向阻尼装置、方向盘盘体和离合装置;
3、所述机架滑动连接于所述基座,且能够相对于所述基座伸出或缩回;
4、所述方向盘盘体设置于所述机架,且所述方向盘盘体的方向转轴传动连接于所述转向阻尼装置,所述机架处于伸出状态时,所述离合装置断开所述方向转轴与所述转向阻尼装置之间的传动连接,以使所述转向阻尼装置为所述方向转轴提供转向阻尼力,所述机架由伸出状态移动至缩回状态的过程中,所述离合装置连通所述方向转轴与所述转向阻尼装置之间的传动连接。
5、作为一种进一步的技术方案,所述转向阻尼装置包括连接于所述方向转轴的阻尼圆盘和套设于所述阻尼圆盘的阻尼圆环,且所述阻尼圆盘与所述阻尼圆环之间通过阻尼传动连接;
6、所述离合装置用于断开或连通所述阻尼圆盘与所述阻尼圆环之间的传动连接。
7、作为一种进一步的技术方案,所述离合装置包括连接于所述机架的摆动夹臂、设置于所述摆动夹臂上的第一限位部和设置于所述阻尼圆环上的第二限位部;
8、所述摆动夹臂用于带动所述第一限位部与所述第二限位部连接或分离,且所述第一限位部与所述第二限位部连接,所述阻尼圆盘与所述阻尼圆环之间的传动连接断开,所述第一限位部与所述第二限位部分离,所述阻尼圆盘与所述阻尼圆环之间的传动连接连通。
9、作为一种进一步的技术方案,还包括驱动装置,所述驱动装置用于驱动所述摆动夹臂沿设定方向往复运动,以使所述第一限位部与所述第二限位部连接或分离。
10、作为一种进一步的技术方案,所述驱动装置包括拉线盒、拉簧和压簧;
11、所述摆动夹臂具有两端,且分别为转接端和自由端,所述转接端转动连接于所述机架,所述压簧连接于所述自由端,所述拉簧的一端连接于所述拉线盒的拉线,另一端连接于所述自由端;
12、所述拉线盒的拉线通过拉簧向所述自由端提供第一方向的力,所述压簧通过压缩向所述自由端提供第二方向的力,且所述第一方向与所述第二方向相反。
13、作为一种进一步的技术方案,沿所述阻尼圆环的外缘方向,所述摆动夹臂设置有两个,两个所述摆动夹臂相对于所述阻尼圆环中心对称,且两个所述摆动夹臂相对应的两端之间均设置有所述压簧;
14、所述驱动装置还包括摆动臂,所述摆动臂转动连接于所述方向转轴,且具有主动端和从动端;
15、所述主动端连接于所述拉簧和一个所述摆动夹臂的自由端,所述从动端连接于另一个所述摆动夹臂的自由端。
16、作为一种进一步的技术方案,所述驱动装置还包括第一滑轮,所述第一滑轮设置于所述机架上,且所述拉线盒的拉线通过所述第一滑轮与所述拉簧连接。
17、作为一种进一步的技术方案,所述驱动装置还包括第二滑轮,所述第二滑轮设置于所述基座上,所述拉线盒设置于所述机架上;
18、所述拉线盒的拉线依次通过所述第二滑轮和所述第一滑轮与所述拉簧连接。
19、作为一种进一步的技术方案,还包括设置于所述基座上的限位装置,所述限位装置用于限制所述机架由伸出状态移动至缩回状态。
20、本实用新型提供的一种清洁机器人,包括所述的伸缩方向盘。
21、与现有技术相比,本实用新型提供的一种伸缩方向盘及清洁机器人所具有的技术优势为:
22、本实用新型提供的伸缩方向盘,包括:基座、机架、转向阻尼装置、方向盘盘体和离合装置;机架滑动连接于基座,且能够相对于基座伸出或缩回;方向盘盘体设置于机架,且方向盘盘体的方向转轴传动连接于转向阻尼装置,机架处于伸出状态时,离合装置断开方向转轴与转向阻尼装置之间的传动连接,以使转向阻尼装置为方向转轴提供转向阻尼力,机架由伸出状态移动至缩回状态的过程中,离合装置连通方向转轴与转向阻尼装置之间的传动连接。
23、由于方向盘盘体设置在机架上,在机架处于伸出状态时,方向盘盘体也处于伸出状态,此时由于离合装置断开转向阻尼装置与方向转轴之间的传动连接,使方向转轴与离合装置能够相对转动,当方向盘盘体转动时,转向阻尼装置为方向转轴提供转向阻尼力,提高驾驶手感;当机架由伸出状态移动至缩回状态的过程中,方向盘盘体也由伸出状态移动至缩回状态,此过程中由于离合装置连通方向转轴与转向阻尼装置之间的传动连接,使方向转轴与离合装置能够同步转动,当方向盘盘体转动时,转向阻尼装置由于随方向转轴同步转动而不为方向转轴提供转向阻尼力,使方向盘盘体回正方便,提高回正效率和效果。
24、本实用新型提供的清洁机器人,包括上述伸缩方向盘,由此,其所达到的技术优势及效果包括上述伸缩方向盘所达到的技术优势及效果,此处不做详细阐述。
25、本实用新型的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
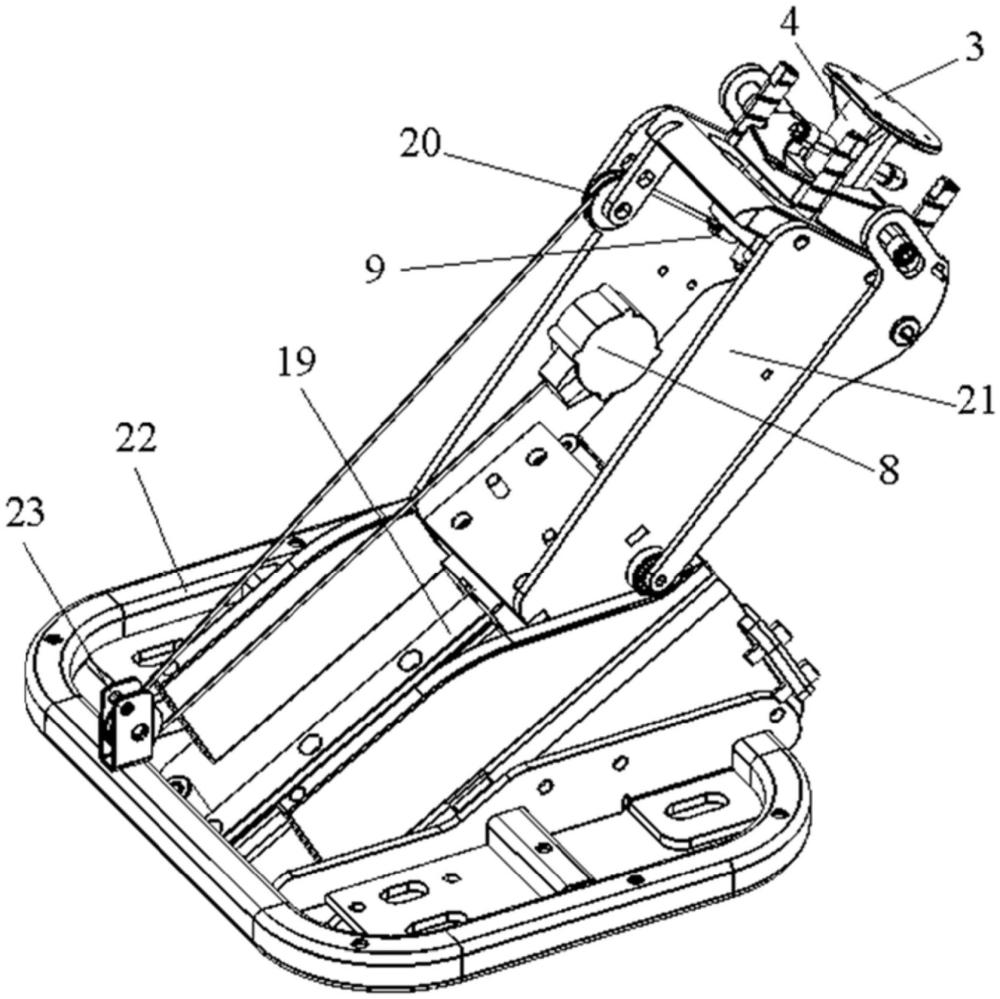
1.一种伸缩方向盘,其特征在于,包括:基座(22)、机架(21)、转向阻尼装置、方向盘盘体(3)和离合装置;
2.根据权利要求1所述的伸缩方向盘,其特征在于,所述转向阻尼装置包括连接于所述方向转轴(4)的阻尼圆盘(1)和套设于所述阻尼圆盘(1)的阻尼圆环(2),且所述阻尼圆盘(1)与所述阻尼圆环(2)之间通过阻尼传动连接;
3.根据权利要求2所述的伸缩方向盘,其特征在于,所述离合装置包括连接于所述机架(21)的摆动夹臂(5)、设置于所述摆动夹臂(5)上的第一限位部和设置于所述阻尼圆环(2)上的第二限位部;
4.根据权利要求3所述的伸缩方向盘,其特征在于,还包括驱动装置,所述驱动装置用于驱动所述摆动夹臂(5)沿设定方向往复运动,以使所述第一限位部与所述第二限位部连接或分离。
5.根据权利要求4所述的伸缩方向盘,其特征在于,所述驱动装置包括拉线盒(8)、拉簧(9)和压簧(10);
6.根据权利要求5所述的伸缩方向盘,其特征在于,沿所述阻尼圆环(2)的外缘方向,所述摆动夹臂(5)设置有两个,两个所述摆动夹臂(5)相对于所述阻尼圆环(2)中心对称,且两个所述摆动夹臂(5)相对应的两端之间均设置有所述压簧(10);
7.根据权利要求5所述的伸缩方向盘,其特征在于,所述驱动装置还包括第一滑轮(20),所述第一滑轮(20)设置于所述机架(21)上,且所述拉线盒(8)的拉线通过所述第一滑轮(20)与所述拉簧(9)连接。
8.根据权利要求7所述的伸缩方向盘,其特征在于,所述驱动装置还包括第二滑轮(23),所述第二滑轮(23)设置于所述基座(22)上,所述拉线盒(8)设置于所述机架(21)上;
9.根据权利要求1-8任意一项所述的伸缩方向盘,其特征在于,还包括设置于所述基座(22)上的限位装置,所述限位装置用于限制所述机架(21)由伸出状态移动至缩回状态。
10.一种清洁机器人,其特征在于,包括权利要求1-9任意一项所述的伸缩方向盘。
技术总结
本技术涉及清洁设备技术领域,尤其是涉及一种伸缩方向盘及清洁机器人。本技术提供的缩方向盘,包括:基座、机架、转向阻尼装置、方向盘盘体和离合装置;机架滑动连接于基座,且能够相对于基座伸出或缩回;机架处于伸出状态时,离合装置断开方向转轴与转向阻尼装置之间的传动连接,当方向盘盘体转动时,转向阻尼装置为方向转轴提供转向阻尼力,提高驾驶手感,机架由伸出状态移动至缩回状态的过程中,离合装置连通方向转轴与转向阻尼装置之间的传动连接,转向阻尼装置由于随方向转轴同步转动而不为方向转轴提供转向阻尼力,使方向盘盘体回正方便,且在缩回的过程中同步回正。
技术研发人员:周彧超,王高祥,杨明月,陈召,乐毅
受保护的技术使用者:上海高仙自动化科技发展有限公司
技术研发日:20231018
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!