运动设备
本技术涉及运动设备领域,具体而言,涉及一种运动设备。
背景技术:
1、当运动设备运动(例如,车辆)在坡面或不平整路面(如,洼地、坎地等)时,运动设备的稳定会受到较大影响,从而出现颠簸、侧翻等不稳定运动。目前,为了增加运动设备通过坡面或不平整路面上运动的稳定性,通常采用的是控制运动设备通过坡面或不平整路面的速度,或者是对运动设备进行较大的结构性的改变,例如在运动设备的底盘中设置可移动的配重块,通过可移动的配重块实现运动设备在坡面或不平整路面上运动的稳定性。但是,控制运动速度的方式会影响运动设备运动或运输的效率,而增加可移动的配重块的方式需要改变运动设备本体的结构,改造难度和成本较大。
技术实现思路
1、有鉴于此,本技术实施例的目的在于提供一种运动设备,能够在提高运动设备运动稳定性的同时,降低对运动设备运动效率的影响。
2、第一方面,本技术实施例提供了一种运动设备,包括:运动装置、调节装置、驱动装置以及支撑框架;所述运动装置与所述支撑框架固定连接,所述运动设备通过所述运动装置进行运动;所述调节装置连接所述支撑框架,所述调节装置配置为通过旋转产生调节力和/或调节力矩;所述驱动装置与所述运动装置连接,所述驱动装置配置为驱动所述运动装置运动;其中,所述调节装置配置为在不同运动状态下输出相应的所述调节力和/或所述调节力矩,所述调节力和/或所述调节力矩用于抵消所述运动设备的不稳定运动的趋势或协助所述运动设备进行运动。
3、在上述实现过程中,通过设置调节装置在不同运动状态下输出相应的调节力和/或调节力矩,以抵消运动设备的不稳定运动的趋势,使得运动设备在路面或其他运动表面面对路面不平、沟壑、坡面等“障碍”路面的情况下,可减少运动设备侧翻等不稳定运动情况发生的可能性,起到协助运动设备稳定运动或行驶的效果,进而减少运动设备在运动中的不稳定情况发生的可能性。另外,通过设置调节装置以旋转产生力或力矩,运动设备运动在不同的地面时,可以直接通过控制调节装置的旋转参数控制调节装置的转动速度和方向,进而调节运动设备输出的调节力和/或调节力矩,实现了运动设备运动控制的灵活性。
4、在一个实施例中,所述调节装置与所述支撑框架可拆卸连接;所述调节装置的组成材料包括轻量材料。
5、在上述实现过程中,通过设置调节装置通过支撑框架连接在运动设备本体之外,且设置调节装置与支撑框架可拆卸连接,使得调节装置独立于运动设备本体。相对于现有技术中将配重块集成在运动设备的底盘上的结构,本技术直接在本体上增加调节装置的方式,不需要改变运动设备本体的结构,降低了运动设备改造难度和成本。另外,由于调节装置与支撑框架可拆卸连接,可以方便调节装置的安装与拆卸,可以增加运动设备上调节装置配置的灵活性。再通过将调节装置设置为轻量材料,可以减少调节装置对运动设备的整体重心的影响,降低调节装置的设置对运动设备的影响。另外,通过将调节装置设置为轻量材料,可以减少运动设备的整体重力,进而减少克服重力生成的阻力或阻力矩需要的调节力和/或调节力矩,降低调节装置的能量消耗。
6、在一个实施例中,还包括:动力装置和驱动支架;所述驱动支架与所述动力装置固定连接;所述驱动支架远离所述动力装置的一端或两端与所述调节装置连接;其中,所述动力装置配置为通过所述驱动支架驱动所述调节装置旋转。
7、在上述实现过程中,通过设置动力装置,且将调节装置通过驱动支架与动力装置连接,可以通过动力装置自动带动调节装置旋转,进而产生调节力和/或调节力矩,实现了调节装置的自动驱动。另外,通过调节动力装置的转速和转向可以实现调节装置输出的调节力和/或调节力矩的调节,实现调节装置的自动调节。
8、在一个实施例中,还包括:控制装置;所述控制装置设置在所述支撑框架上,所述控制装置配置为根据获取到的运动设备相关信息生成控制信息,所述控制信息用于控制所述动力装置的动作方向和动作速度;其中,所述动力装置配置为按照所述动作方向和所述动作速度驱动所述调节装置旋转,以抵消所述运动设备的不稳定运动的趋势或协助所述运动设备进行运动。
9、在上述实现过程中,通过在运动设备上设置控制装置,该控制装置可以根据运动设备相关信息生成相应的用于控制动力装置的控制信息,实现了动力装置的自动化控制,提高运动设备的自动化程度。
10、在一个实施例中,所述支撑框架与所述运动装置可拆卸连接;其中,所述支撑框架配置为设置在所述运动装置的不同位置;或,所述支撑框架为可伸缩结构;其中,所述调节装置配置为通过所述支撑框架伸缩调整设置位置;或,所述支撑框架为可旋转结构;其中,所述调节装置配置为通过所述支撑框架旋转调整设置位置。
11、在上述实现过程中,通过将支撑框架设置为可以灵活调节的各种方式,在调节装置需要调节设置位置时,可以直接通过调节支撑框架实现,增加了调节装置在运动设备上设置位置的灵活性,使得调节装置的设置位置可以按照运动设备的运动状态进行调整,进一步降低调节装置对运动设备的重心的影响。
12、在一个实施例中,在所述运动设备在坡面上纵向运动过程中,所述运动设备的重力延长线越过所述运动设备在运动平面的投影面边缘时;所述调节装置配置为在所述运动设备的高端产生朝向地面的调节力矩或调节力;所述运动设备的高端为所述运动设备在所述运动设备前进方向的高度较高的一端;其中,朝向地面的调节力矩或调节力用于抵消所述运动设备的重力产生的阻力矩或阻力;所述阻力矩或所述阻力配置为产生所述运动设备的不稳定运动的趋势或阻碍所述运动设备进行运动。
13、在上述实现过程中,在运动设备在坡面上纵向运动过程中,运动设备的重力延长线越过运动设备在运动平面的投影面边缘时,通过在运动设备的高端产生朝向地面的调节力矩或调节力,可以将运动设备重力在高端产生的反作用力或反作用力矩抵消,使得运动设备的重力延长线在运动设备在运动平面的投影面内,进而提高运动设备在坡面运动的稳定性。
14、在一个实施例中,在所述运动设备的后端跨越障碍物过程中,所述运动设备的重心在所述障碍物与所述运动设备支点的后端时;所述调节装置配置为在所述运动设备的前端产生朝向地面的调节力矩或调节力;所述运动设备的前端为所述运动设备面对所述运动设备前进方向的一端;其中,朝向地面的调节力矩或调节力用于抵消所述运动设备的重力产生的阻力矩或阻力;所述阻力矩或所述阻力配置为产生所述运动设备的不稳定运动的趋势或阻碍所述运动设备进行运动。
15、在上述实现过程中,在运动设备的后端跨越障碍物过程中,运动设备的重心在障碍物与运动设备支点的后端时,通过在运动设备的前端产生朝向地面的调节力矩或调节力,可以将运动设备重力在前端产生的反作用力或反作用力矩抵消,使得运动设备的重心在障碍物与运动设备支点的前端,进而提高运动设备越障的稳定性。
16、在一个实施例中,在所述运动设备的前端跨越障碍物过程中,所述运动设备的重心在所述障碍物与所述运动设备支点的前端时;所述调节装置配置为产生向上的调节力矩或调节力;所述运动设备的前端为所述运动设备面对所述运动设备前进方向的一端;其中,向上的调节力矩或调节力用于抵消所述运动设备的重力产生的阻力矩或阻力;所述阻力矩或所述阻力配置为产生所述运动设备的不稳定运动的趋势或阻碍所述运动设备进行运动。
17、在上述实现过程中,在运动设备的前端跨越障碍物过程中,运动设备的重心在障碍物与运动设备支点的前端时,通过在运动设备的前端产生向上的调节力矩或调节力,可以将运动设备重力在前端产生的反作用力或反作用力矩抵消,使得运动设备的重心在障碍物与运动设备支点的后端,进而提高运动设备越障的稳定性。
18、在一个实施例中,在所述运动设备在坡面上横向运动过程中,所述运动设备的重力延长线越过所述运动设备在运动平面的投影面边缘时;所述调节装置配置为在所述运动设备的高侧产生朝向地面的调节力矩或调节力;所述运动设备的高侧为所述运动设备在所述运动设备前进方向上高度较高的一侧;其中,朝向地面的调节力矩或调节力用于抵消所述运动设备的重力产生的阻力矩或阻力;所述阻力矩或所述阻力配置为产生所述运动设备的不稳定运动的趋势或阻碍所述运动设备进行运动。
19、在上述实现过程中,在运动设备在坡面上横向运动过程中,运动设备的重力延长线越过运动设备在运动平面的投影面边缘时,通过在运动设备的高端产生朝向地面的调节力矩或调节力,可以将运动设备重力在高端产生的反作用力或反作用力矩抵消,使得运动设备的重力延长线在运动设备在运动平面的投影面内,进而提高运动设备在坡面运动的稳定性。
20、在一个实施例中,所述调节装置为风轮;所述风轮与所述支撑框架固定连接;其中,所述风轮的旋转轴平行所述运动设备的运动平面设置。
21、在上述实现过程中,通过将调节装置设置为风轮,风轮通过旋转产生调节力矩,由于调节力矩可以平移到任何受力点,因而风轮在运动设备上的设置位置不受限制,增加了调节装置安装的灵活性。
22、在一个实施例中,所述调节装置为涵道或旋翼;所述运动设备还包括:连接杆;所述连接杆的一端与所述支撑框架固定连接,所述连接杆的另一端与所述涵道或所述旋翼连接;其中,所述涵道或所述旋翼配置为通过所述连接杆设置在所述支撑框架外侧;所述涵道或所述旋翼的旋转轴垂直所述运动设备的运动平面设置。
23、在上述实现过程中,通过将调节装置设置为涵道或旋翼,该涵道或旋翼通过连接杆设置在支撑框架的外侧,使得涵道或旋翼独立于运动设备本体。相对于现有技术中将配重块集成在运动设备的底盘上的结构,通过直接在本体上增加涵道或旋翼的方式,不需要改变运动设备本身的结构,降低了运动设备改造难度和成本。
24、在一个实施例中,所述涵道或所述旋翼到所述支撑框架的距离大于等于为所述运动设备沿运动方向长度的一半。
25、在上述实现过程中,通过将涵道或旋翼到支撑框架的距离大于等于为运动设备沿运动方向长度的一半,可以使得涵道或旋翼的力臂在一个相对合适的大小,进行使得涵道或旋翼通过旋转产生的调节力能够对运动设备具有明显的调节作用,增加涵道或旋翼的调节能力。
26、在一个实施例中,所述连接杆为可伸缩结构;其中,所述涵道或所述旋翼配置为通过所述连接杆伸缩调整设置位置;或,所述连接杆与所述支撑框架旋转连接;其中,所述涵道或所述旋翼配置为通过所述连接杆旋转调整设置位置。
27、在上述实现过程中,通过将连接杆设置为可以灵活调节的各种方式,在涵道或旋翼需要调节设置位置时,可以直接通过调节连接杆实现,增加了涵道或旋翼在运动设备上设置位置的灵活性,使得涵道或旋翼的设置位置可以按照运动设备的运动状态进行调整,进一步降低涵道或旋翼对运动设备的重心的影响。
28、为使本技术的上述目的、特征和优点能更明显易懂,下文特举实施例,并配合所附附图,作详细说明如下。
29、附图说明
30、为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
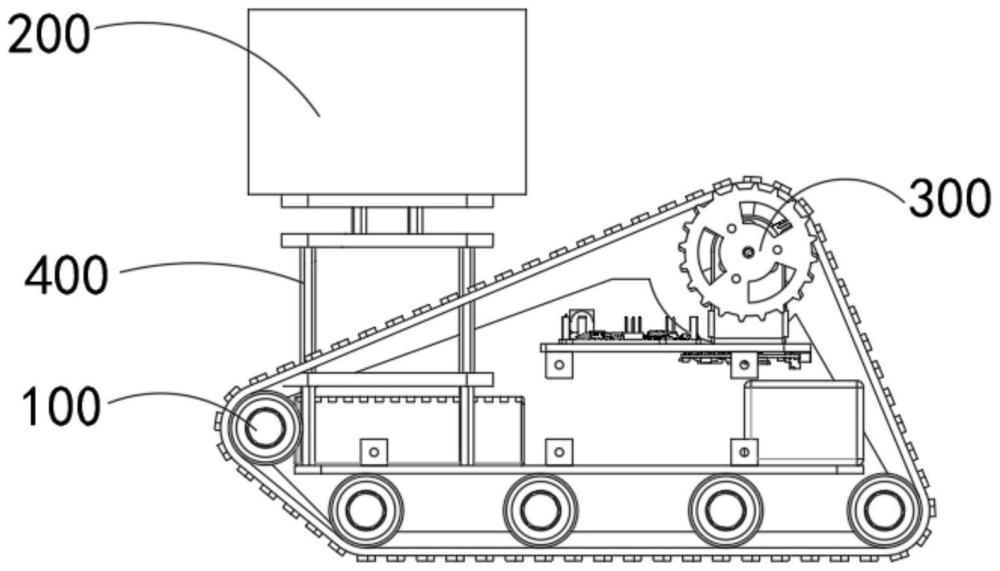
31、图1为本技术实施例提供的运动设备的侧视图;
32、图2为本技术实施例提供的运动设备的正视图;
33、图3为本技术实施例提供的运动设备爬坡时,重力的作用延长线变化示意图;
34、图4为本技术实施例提供的运动设备爬坡时,调节力矩和调节力方向示意图;
35、图5为本技术实施例提供的运动设备上台阶时,重心位置示意图;
36、图6为本技术实施例提供的运动设备的后端过沟时,重心位置示意图;
37、图7为本技术实施例提供的运动设备的前端过沟时,重心位置示意图;
38、图8为本技术实施例提供的运动设备在坡面横向运动时,重力的作用延长线变化示意图;
39、图9为本技术实施例提供的调节装置为风机的运动设备的示意图;
40、图10为本技术实施例提供的调节装置为涵道的运动设备的示意图;
41、图11为本技术实施例提供的调节装置为旋翼的运动设备的示意图。
- 还没有人留言评论。精彩留言会获得点赞!