一种水冷壁爬壁作业机器人的制作方法
本发明涉及爬壁作业机器人,具体而言,涉及一种水冷壁爬壁作业机器人。
背景技术:
1、水冷壁是锅炉的主要受热部分,其由数排钢管组成,分布于锅炉炉膛的四周。水冷壁通过金属管排吸收燃料燃烧产生的热量加热钢管内部的水汽,实现换热,是锅炉最重要的受热面之一。定期对水冷壁进行检测是保证水冷壁正常运行的关键。
2、现有技术中,通常采用搭设脚手架,由工人手持作业部件对水冷壁的壁面进行维护,由于作业部件缺乏支撑,工人长期手持作业部件作业容易发生抖动,存在工人劳动强度大,作业效率低,且存在工人坠落的风险甚至威胁工人的生命健康。
技术实现思路
1、本发明提供一种水冷壁爬壁作业机器人,用以解决现有技术中需要工人手持作业部件对水冷壁进行维护,存在作业效率低、工人劳动强度大的技术问题。
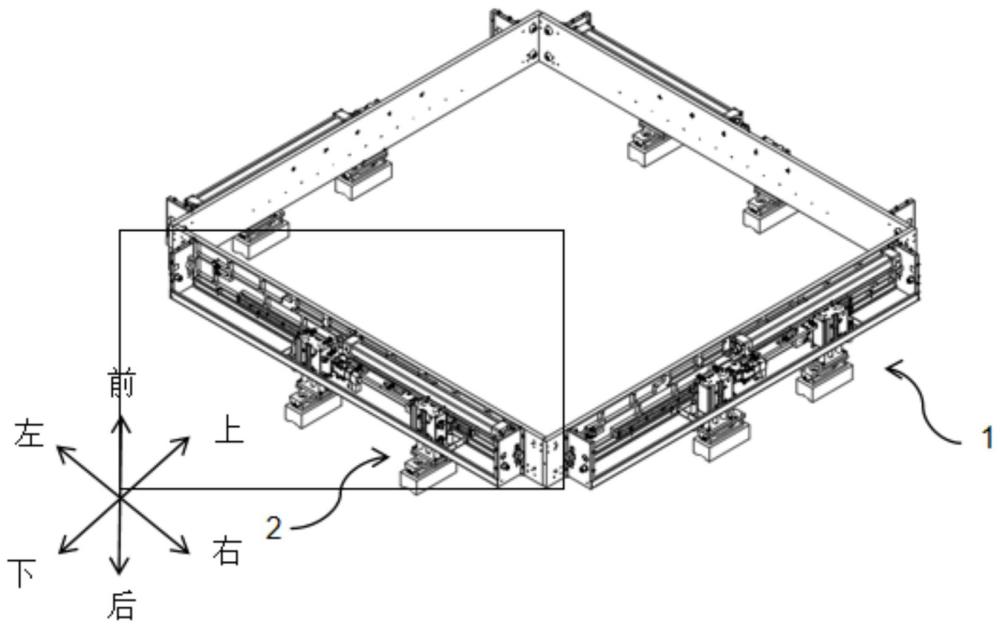
2、本发明提供一种水冷壁爬壁作业机器人,包括:
3、框架,其上设有作业部件;
4、爬管机构,其具有两组且分别固设于所述框架沿第一方向的两端;所述爬管机构包括第一基座、升降组件、第一伸缩组件和第一电磁铁,所述第一基座固设于所述框架,所述升降组件固设于所述第一基座,所述第一伸缩组件固设于所述升降组件的动力输出端,所述第一电磁铁沿第二方向枢接于所述第一伸缩组件的动力输出端,所述第一伸缩组件用于驱动所述第一电磁铁沿第三方向靠近或远离管壁;
5、所述升降组件的动力输出端设有距离传感器,所述距离传感器位于所述第一电磁铁沿所述第一方向的一侧,所述距离传感器用于检测所述管壁的积灰;
6、其中,所述第一电磁铁靠近所述管壁的一侧具有弧面结构,所述弧面结构能够与所述管壁相贴合;所述第一方向、所述第二方向和所述第三方向彼此相互垂直。
7、本发明提供的一种水冷壁爬壁机器人,第一方面,在框架上设置两组爬管机构,实现沿水冷壁的爬行;第二方面,采用电磁铁吸附,电磁铁仅在通电时产生吸力,提高爬管机构的能效,避免电磁铁长时间通电产生热量带来的能量损耗;第三方面,电磁铁具有弧面结构,与管壁的形状相匹配,增大与管壁的接触面积,提高电磁铁与水冷壁之间的吸力,提升爬管机构的安全性;此外,取代工人手持作业部件对水冷壁进行维护,工作效率高,减轻工人的劳动强度。
8、进一步地,所述爬壁作业机器人还包括跨管机构,其具有两组且分别固设于所述框架沿所述第二方向的两端;所述跨管机构包括第二基座、横移组件、第二伸缩组件和第二电磁铁,所述第二基座固设于所述框架,所述横移组件固设于所述第二基座,所述第二伸缩组件固设于所述横移组件的动力输出端,所述第二电磁铁沿所述第二方向枢接于所述第二伸缩组件的动力输出端,所述第二伸缩组件用于驱动所述第二电磁铁沿所述第三方向靠近或远离所述管壁;
9、其中,所述第二电磁铁靠近所述管壁的一侧均具有弧面结构,所述弧面结构能够与所述管壁相贴合。
10、本发明提供的一种水冷壁爬壁机器人,第一方面,在框架上设置两组跨管机构,实现沿水冷壁的管排的横移,扩大爬壁机器人的作业范围;第二方面,采用电磁铁吸附,电磁铁仅在通电时产生吸力,提高爬管机构的能效,避免电磁铁长时间通电产生热量带来的能量损耗;第三方面,电磁铁具有弧面结构,与管壁的形状相匹配,增大与管壁的接触面积,提高电磁铁与水冷壁之间的吸力,提升爬管机构的安全性;此外,取代工人手持作业部件对水冷壁进行维护,工作效率高,减轻工人的劳动强度。
11、进一步地,所述升降组件的动力输出端设有吹灰组件,所述吹灰组件位于所述第一电磁铁和所述距离传感器之间,所述距离传感器与所述吹灰组件的控制器电连接,所述吹灰组件用于清除所述管壁的积灰。如此设置,实现对管壁的积灰的及时清理,为电磁铁稳定的吸附于管壁提供保障。
12、进一步地,所述升降组件包括第一导轨、第一滑块、第二滑块和第一驱动部件,所述第一导轨固设于所述第一基座,所述第一滑块和所述第二滑块分别沿所述第二方向滑动连接于所述第一导轨,所述第一驱动部件固设于所述第一基座,所述第一驱动部件的动力输出端分别连接于所述第一滑块和所述第二滑块;所述第一伸缩组件具有两组,每组所述第一伸缩组件包括第一安装板和第一线性驱动部件,每个所述第一安装板分别固设于所述第一滑块和所述第二滑块,所述第一线性驱动部件固设于所述第一安装板,所述第一电磁铁枢接于所述第一线性驱动部件的动力输出端;
13、和/或,所述横移组件包括第二导轨、第三滑块、第四滑块和第二驱动部件,所述第二导轨固设于所述第二基座,所述第三滑块和所述第四滑块分别沿所述第一方向滑动连接于所述第二导轨,所述第二驱动部件固设于所述第二基座,所述第二驱动部件的动力输出端分别连接于所述第三滑块和所述第四滑块;所述第二伸缩组件具有两组,每组所述第二伸缩组件包括第二安装板和第二线性驱动部件,每个所述第二安装板分别固设于所述第三滑块和所述第四滑块,所述第二线性驱动部件固设于所述第二安装板,所述第二电磁铁枢接于所述第二线性驱动部件的动力输出端。
14、进一步地,所述升降组件还包括第一连接板和第二连接板,所述第一连接板分别固设于所述第一滑块和所述第二滑块;所述第二连接板固设于所述第一连接板,所述第一驱动部件的动力输出端连接于所述第二连接板;
15、和/或,所述横移组件还包括第三连接板和第四连接板,所述第三连接板分别固设于所述第三滑块和所述第四滑块;所述第四连接板固设于所述第二连接板,所述第二驱动部件的动力输出端连接于所述第四连接板;
16、和/或,所述第一线性驱动部件的动力输出端固设有第一安装座,所述第一安装座枢接有第二安装座,所述第一电磁铁固设于所述第二安装座;
17、和/或,所述第二线性驱动部件的动力输出端固设有第三安装座,所述第三安装座枢接有第四安装座,所述第二电磁铁固设于所述第四安装座。
18、进一步地,所述第一安装座包括第一座本体和第一凸耳,所述第一座本体固设于所述第一线性驱动部件的动力输出端,所述第一凸耳固设于所述第一座本体,所述第一凸耳设有第一枢接孔;所述第二安装座包括第二座本体和第二凸耳,所述第二凸耳固设于所述第二座本体,所述第二凸耳设有第二枢接孔,所述第一枢接孔和所述第二枢接孔内设有第一转轴;
19、和/或,所述第三安装座包括第三座本体和第三凸耳,所述第三座本体固设于所述第二线性驱动部件的动力输出端,所述第三凸耳固设于所述第三座本体,所述第三凸耳设有第三枢接孔;所述第四安装座包括第四座本体和第四凸耳,所述第四凸耳固设于所述第四座本体,所述第四凸耳设有第四枢接孔,所述第三枢接孔和所述第四枢接孔内设有第二转轴。
20、进一步地,所述第一安装板固设有第一底壳,所述第一底壳的表面垂直于所述第三方向,所述第一底壳包括第一开孔和第二开孔,所述第一开孔用于穿过其中一个所述第一线性驱动部件的动力输出端,所述第二开孔用于穿过另一个所述第一线性驱动部件的动力输出端;
21、和/或,所述第二安装板固设有第二底壳,所述第二底壳的表面垂直于所述第三方向,所述第二底壳包括第三开孔和第四开孔,所述第三开孔用于穿过其中一个所述第二线性驱动部件的动力输出端,所述第四开孔用于穿过另一个所述第二线性驱动部件的动力输出端。
22、进一步地,所述距离传感器设于第一底壳,所述距离传感器具有2个且分别位于两个所述第一线性驱动部件沿所述第一方向相对远离的一端的外侧;
23、所述距离传感器与所述第一驱动部件、所述第一线性驱动部件以及所述第一电磁铁电连接,若所述距离传感器检测到所述管壁具有积灰,所述第一电磁铁失电,所述第一线性驱动部件驱动所述第一电磁铁远离所述管壁,所述第一驱动部件驱动所述第一电磁铁越过所述积灰所在位置;或,所述吹灰组件设于所述第一底壳,所述吹灰组件包括连接管和吹嘴,所述连接管固设于所述第一底壳,所述吹嘴位于所述第一电磁铁和所述距离传感器之间,所述距离传感器与所述吹嘴的控制器电连接,所述吹嘴用于清除所述管壁的积灰。
24、进一步地,所述第一基座固设有第一壳体,所述升降组件、所述第一安装板和所述第一线性驱动部件的固定端以及所述第一底壳设于所述第一壳体内;所述第一壳体的底部为第一中空结构,所述第一底壳能够在所述第一中空结构内移动;
25、和/或,所述第二基座固设有第二壳体,所述横移组件、所述第二安装板和所述第二线性驱动部件的固定端以及所述第二底壳设于所述第二壳体内;所述第二壳体的底部为第二中空结构,所述第二底壳能够在所述第二中空结构内移动。
26、进一步地,所述第一壳体包括沿周向方向依次相连的第一侧板、第一u形板、第二侧板和第二u形板,所述第一u形板和所述第二u形板的u形开口相对设置,所述第一侧板、所述第一u形板和所述第二侧板固设于所述第一基座;所述第一u形板和所述第二u形板之间滑动连接有第一风琴罩;所述第一u形板和所述第二u形板之间滑动连接有第二风琴罩;
27、和/或,所述第二壳体包括沿周向方向依次相连的第三侧板、第三u形板、第四侧板和第四u形板,所述第三u形板和所述第四u形板的u形开口相对设置,所述第三侧板、所述第三u形板和所述第四侧板固设于所述第二基座;所述第三u形板和所述第四u形板之间滑动连接有第三风琴罩;所述第三u形板和所述第四u形板之间滑动连接有第四风琴罩。如此设置,实现防尘。
- 还没有人留言评论。精彩留言会获得点赞!