一种主被动混合驱动型人形机器人下肢结构体
本发明涉及一种面向双足人形机器人的下肢结构体,更具体地说,是指一种主被动混合驱动型双足人形机器人下肢结构体。
背景技术:
1、在人口老龄化加剧和社会不断发展的背景下,人们对生活质量要求的不断提高与提供社会生产资料劳动力人口不足的矛盾问题越发显现。随着科技不断进步,使用机器人特别是人形机器人辅助或者代替人类完成工作成为解决上述问题的重要途径之一。人形机器人作为集人工智能、高端制造、新材料等先进技术的集大成者,将深刻变革人类生产生活方式,已成为科技竞争的新高地、未来产业的新赛道和经济发展的新引擎。对人形机器人开展研究具有重要的科研、工程及社会价值。
2、在人形机器人研究中,实现机器人的轻便紧凑、高效率和长续航具有重要意义。目前大多数人形机器人通常依赖电机提供驱动力,这对电机的效率、动态性和功率密度等性能提出了极高的要求。在轻便紧凑大力距电机和高效电池技术取得突破性进展之前,完全依赖电机驱动还难以满足高动态、高爆发和高精度等人形机器人运动性能的需求。液压驱动是双足人形机器人的另一种常见驱动方式,该方式功率/质量比大、动态性好、结构紧凑且驱动力更强,但该方式噪音大、功耗高,而且由于液压系统需要大量的管路、油箱等部件,占用空间较大,不利于轻量化设计,另外还存在安装维护难度大的问题。除上述两类驱动类型之外,也有研究者提出纯被动双足机器人方案。该类型机器人是在不采用能量驱动和主动控制的情况下,利用机器人自身的内在动力学特性,在重力作用下沿倾斜地面向下行走,能够获得自然、能效高、稳定的步态。但是由于没有驱动和控制系统,机器人的步态单一,只能在斜坡上向下行走,且灵敏度较低,因此具有明显的局限性。综上可知,如果能设计一种主被动结合型双足人形机器人,一方面通过电机的主动控制实现人形机器人步态的自适应切换,另一方面通过一套紧凑的被动机构平衡人形机器人行走时下肢关节所需承受的自身重力力矩,进而减小关节处电机所需要的驱动力矩,则能很好的实现轻便紧凑、高效率和长续航的人形机器人设计。
技术实现思路
1、本发明提供一种主被动混合驱动型的双足人形机器人下肢结构体,解决现有电机和液压驱动型人形机器人难以兼顾轻便紧凑、高效率和长续航性能,而被动型人形机器人虽然无需外界能源驱动,但步态单一且灵敏度较低的问题。本发明主被动混合驱动双足人形机器人下肢结构体通过内嵌在下肢大小腿和背部连杆上的可调预紧力弹簧,并结合齿轮机构,实现运动过程中形成相应的力矩平衡机器人自身重力力矩。在此基础上,在关节上安装盘式电机,实现人形机器人关节驱动。
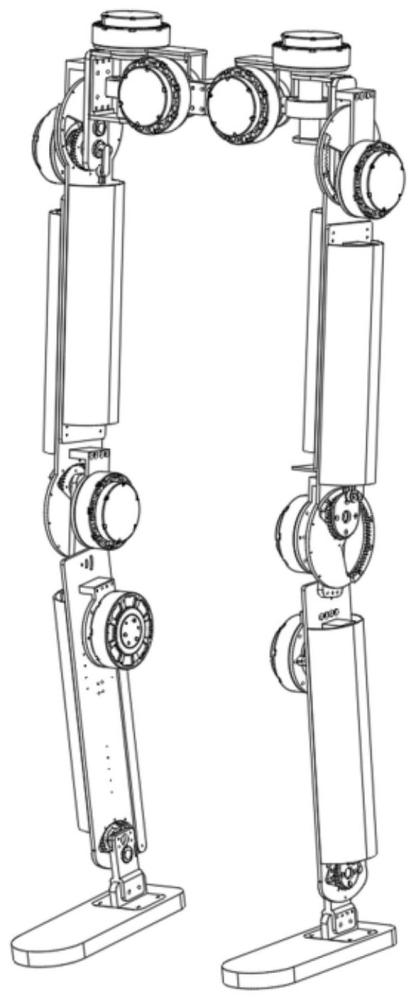
2、本发明采用的技术方案是:一种主被动混合驱动型下肢双足机器人,包括髋部r、髋关节r、膝关节r、髋关节r、髋部l、髋关节l、膝关节l、踝关节l;
3、踝关节r包括踝关节调节电机(1)、第一电机支架(2)、第一轴承(3)、第一预紧力支架(4)、预紧力调节螺栓1(5)、第一预紧力调节滑块(6)、第二轴承(7)、第一预紧力前端支架(8)、踝关节外壳(9)、第一弹簧(10)、第一弹簧固定块(11)、第一滑杆滑块(12)、第一滑杆(13)、第一滑块(14)、预紧力调节块(15)、第二弹簧固定块(16)、第一滑轨(17)、第二弹簧(18)、第二滑轨(19)、第二滑块(20)、第三弹簧固定块(21)、第三轴承(22)、踝关节外齿条(23)、踝关节小齿轮(24)、第四轴承(25)、踝关节摇杆(26)、第一摇杆固定端盖(27)、第五轴承(28)、第一摇柄(29)、第六轴承(30)、第一摇杆端盖(31)、踝关节驱动电机(32)、踝关节驱动电机支架(33)、踝关节电机输出轴(34)、第七轴承(35)、平行长摇杆(36)、踝关节轴承支架(37)、平行短摇杆(38)、第八轴承(39)、第一平行摇杆端盖(40)、踝关节移动板(41)、第九轴承(42)、第一支撑轴端盖(43)、第十轴承(44)、踝关节支撑板(45)、踝关节齿轮轴端盖(46)、平行固定摇杆(47)、第十一轴承(48)、第二平行摇杆端盖(49)、第十二轴承(50)、踝关节支撑轴(51)、足部连接件(52)、足部连接件(53);
4、足部连接件(52)下端与足部(53)固定连接,后外壳(140)上端与踝关节支撑板(45)固定连接;踝关节支撑轴(51)一端依次穿过第十二轴承(50)、踝关节支撑板(45)的下方孔位、第十轴承(44)与第一支撑轴端盖(43)配合,踝关节支撑轴(51)另一端与踝关节移动板(41)下端配合;踝关节齿轮轴端盖(46)一端与踝关节支撑板(45)上端配合,另一端穿过踝关节移动板(41)的上方弧形空隙、第三轴承(22)、踝关节小齿轮(24)、第四轴承(25)、踝关节摇杆(26)后与第一摇杆固定端盖(27)配合;平行固定摇杆(47)与踝关节支撑板(45)右侧的缺口配合;第二平行摇杆端盖(49)穿过第十一轴承(48)与平行固定摇杆(47)右侧孔位与平行长摇杆(36)下方孔位配合;第一平行摇杆端盖(40)穿过第九轴承(42)与平行短摇杆(38)右侧孔位与平行长摇杆(36)上方孔位配合;踝关节驱动电机(32)中间输出轴与踝关节电机输出轴(34)配合,踝关节驱动电机(32)外壳与踝关节驱动电机支架(33)配合连接;踝关节驱动电机支架(33)上端与踝关节移动板(41)配合;踝关节轴承支架(37)与踝关节驱动电机支架(33)固连;第七轴承(35)置于踝关节轴承支架(37)中;踝关节电机输出轴(34)依次穿过第七轴承(35)、踝关节轴承支架(37)、平行短摇杆(38)左侧八边形孔位、第八轴承(39)、踝关节移动板(41)中间孔位,与踝关节移动板(41)连接;关节外齿条(23)固定连接于踝关节移动板(41)弧形空隙上半部分;踝关节小齿轮(24)与踝关节外齿条(23)配合;踝关节摇杆(26)上方依次穿过第五轴承(28)、第一摇柄(29)、第六轴承(30)与第一摇杆端盖(31)配合;第一滑杆(13)下方与第一摇柄(29)相连,上方穿过滑杆第一滑块(12)孔位置于滑杆第一滑块(12)中心位置;第一滑杆滑块(12)左右分别穿过第一弹簧(10)、第二弹簧(18)与第一弹簧固定件(11)、第三弹簧固定件(21)配合;第一弹簧滑块(12)下方与第二滑块(20)配合;第二滑轨(19)安装在踝关节移动板(41)上;第二滑块(20)与第二滑轨(19)配合;第一预紧力调节块(15)两边穿过第一弹簧(10)、第二弹簧(18)分别与预紧力调节第一滑块(6)、第二弹簧固定块(16)配合;第一预紧力调节块(15)中间与第一预紧力调节螺栓(5)配合;第一预紧力前端支架(8)下方与踝关节移动板(41)固定连接;第三轴承(7)置于第一预紧力底座顶(8)中间;第一预紧力调节栓1(5)前端置于第二轴承(7)中;第一滑轨(17)固定于踝关节移动板(41)上;第一滑块(14)与第一滑轨(17)配合;第一预紧力调节块(15)固定在第一滑块(14)上;第一预紧力支架(4)固定在踝关节移动板(41)上面;第二轴承(3)置于第一预紧力支架(4)其中;第一预紧力调节螺栓(5)穿过第一预紧力调节块(15)与其配合;踝关节调节电机(1)与第一电机支架(2)固定连接,输出轴与第一预紧力调节螺栓(5)配合;
5、膝关节r包括膝关节外壳(54)、第二摇杆(55)、第四弹簧固定块(56)、第二滑杆滑块(57)、第三滑块(58)、第三弹簧(59)、第二预紧力调节滑块(60)、第四滑块(61)、第二预紧力调节螺栓(62)、第三滑轨(63)、第五弹簧固定块(64)、第二预紧力前端支架(65)、第十三轴承(66)、第四滑轨(67)、第六弹簧固定块(68)、第二预紧力调节块(69)、第二预紧力调节支架(70)、第十四轴承(71)、第二电机支架(72)、膝关节调节电机(73)、膝关节驱动电机(74)、膝关节电机输出轴(75)、膝关节输出电机支架(76)、膝关节轴承支架(77)、第二支撑轴端盖((78)、第十五轴承(79)、膝关节支撑板(80)、第十六轴承(81)、膝关节支撑轴(82)、膝关节移动板(83)、膝关节外齿条(84)、膝关节小齿轮(85)、膝关节摇杆(86)、第十七轴承(87)、第二摇柄(88)、第十八轴承(89)、第二摇杆端盖((90)、第十九轴承(91)、第二十轴承(92)、第六弹簧(145)、膝关节齿轮轴(153)、第二支撑轴端盖(154);
6、膝关节支撑轴(82)一端依次穿过第十六轴承(81)、膝关节支撑板(80)上方孔位、第十五轴承(79)与第二支撑轴端盖(78)配合,膝关节支撑轴(82)另一端与膝关节移动板(83)配合;膝关节齿轮轴(153)一端与膝关节小齿轮(85)配合,膝关节齿轮轴(153)另一端穿过膝关节移动板(83)下方弧形空隙后穿过膝关节支撑板(80)、第二十轴承(92)、第十九轴承(91)后与第二支撑轴端盖(154)配合;膝关节驱动电机(74)中间输出轴与膝关节电机输出轴(75)配合,外壳与膝关节输出电机支架(76)配合连接;膝关节输出电机支架(76)下端与膝关节移动板(83)配合;膝关节轴承支架(77)与膝关节支撑板(80)固连;第十五轴承(79)置于膝关节轴承支架(77)中;膝关节外齿条(84)固定连接于膝关节移动板(83)下半部分;膝关节小齿轮(85)与膝关节外齿条(84)配合;膝关节摇杆(86)下方依次穿过第十七轴承(87)、第二摇柄(88)、第十八轴承(89)与(第二摇杆端盖(90)配合;第二摇杆(55)上方与第二摇柄(88)相连,下方穿过第二滑杆滑块(57)孔位置于第二滑杆滑块(57)中心位置;第二滑杆滑块(57)左右分别穿过第六弹簧(145)、第三弹簧(59)与第五弹簧固定块(64)、第四弹簧固定块(56)配合;第二滑杆滑块(57)下方与第三滑块(58)配合;第三滑轨(63)安装在膝关节移动板(83)上;第三滑块(58)与第三滑轨(63)配合;第二预紧力调节块(69)两边穿过第六弹簧(145)、第三弹簧(59)分别与第六弹簧固定块(68)、第二预紧力调节滑块(60)配合;第二预紧力调节块(69)中间与第二预紧力调节螺栓(62)配合;第二预紧力前端支架(65)下方与膝关节移动板(83)固定连接;第十三轴承(66)置于第二预紧力前端支架(65)中间;第二预紧力调节螺栓(62)前端置于第十三轴承(66)中;第四滑轨(67)固定于膝关节移动板(83)上;第三滑块(61)与第三滑块导轨(67)配合;第二弹簧固定滑块(60)固定在第四滑块(61)上;第二预紧力调节支架(70)固定在膝关节移动板(83)上面;第十四轴承(71)置于第二预紧力调节支架(70)其中;第二预紧力调节螺栓(62)穿过第二预紧力调节块(69)与其配合;膝关节调节电机(73)与第二电机支架(72)固定连接,输出轴与第二预紧力调节螺栓(62)配合;
7、髋关节r包括第三摇杆(93)、第三摇杆滑块(94)、第七弹簧固定块(95)、第三预紧力前端支架(96)、第二十一轴承(97)、第四弹簧(98)、第三预紧力调节块(99)、第二十二轴承(100)、髋关节调节电机(101)、第三电机支架(102)、预紧力支架3(103)、第三预紧力调节螺栓(104)、第五滑轨(105)、第五滑块(106)、第七弹簧固定块(107)、第三预紧力调节滑块(108)、第五弹簧(109)、第八弹簧固定块(110)、第五滑块(111)、第六滑轨(112)、第三摇杆端盖(第三摇杆端盖(113)、第二十三轴承(114)、髋关节驱动电机(115)、髋关节驱动电机支架(116)、髋关节小齿轮(117)、第二十四轴承(118)、髋关节轴承支架(119)、髋关节移动板(120)、髋关节支撑轴(121)、第二十五轴承(122)、髋关节支撑板(123)、第二十六轴承(124)、第二十七轴承(125)、第三支撑轴端盖(126)、第三摇柄(127)、髋关节摇杆(128)、髋关节电机输出轴(129)、髋关节外齿条(130)、髋关节外壳(150)、轴承(151)、髋关节齿轮轴(152);
8、髋关节支撑轴(121)一端依次穿过第二十五轴承(122)、髋关节支撑板(123)下方孔位、第二十六轴承(124)与第三支撑轴端盖(126)配合,另一端与髋关节移动板(120)配合;髋关节齿轮轴(152)一端穿过第二十八轴承(151)、髋关节支撑板(123)下方孔位、第二十七轴承(125)、髋关节摇杆(128)上方八边形孔位,另一端穿过髋关节移动板(120)下方弧形空隙与髋关节小齿轮(117)配合后穿过髋关节轴承支架(119)、髋关节轴承支架(119)与髋关节电机输出轴(129)配合;髋关节驱动电机(115)中间输出轴与髋关节电机输出轴(129)配合,外壳与髋关节驱动电机支架(116)配合连接;髋关节驱动电机支架(116)上端与髋关节支撑板(123)配合;髋关节轴承支架(119)与髋关节驱动电机支架(116)固连;第二十四轴承(118)置于电髋关节轴承支架(119)中;髋关节外齿条(130)固定连接于髋关节移动板(120)上半部分;髋关节小齿轮(117)与髋关节外齿条(130)配合;髋关节摇杆(128)下方依次穿过第二十三轴承(114)与第三摇杆端盖(第三摇杆端盖(113)配合;第二十三轴承(114)置于第三摇柄(127)中;第三摇杆(93)上方与第三摇柄(127)相连,第三摇杆(93)下方穿过第三摇杆滑块(94)孔位,并置于第三摇杆滑块(94)中心位置;第三摇杆滑块(94)左右两端分别穿过第五弹簧(109)、第四弹簧(98)与第九弹簧固定件(110)、第八弹簧固定件(95)配合;第三弹簧94)下方与第五滑块(111)配合;第六滑轨(112)安装在髋关节移动板(120)上;第五滑块(111)与第六滑轨(112)配合;预紧力调节第三滑块(108)两边穿过第五弹簧(109)、第四弹簧(98)分别与第七弹簧固定块(107)、第三预紧力调节块(99)配合;第三预紧力调节滑块(108)中间与第三预紧力调节螺栓(104)配合;第三预紧力前端支架(96)下方与髋关节移动板(120)固定连接;第二十一轴承(97)置于第三预紧力前端支架(96)中间;第三预紧力调节螺栓(104)前端置于第二十一轴承(97)中;第五滑轨(105)固定于髋关节移动板(120)上;第五滑块(106)与第五滑轨(105)配合;第三预紧力调节块(99)固定在第五滑块(106)上;第二十二轴承(100)置于预紧力支架3(103)其中;第三预紧力支架(103)固定在髋关节移动板(120)上面;第三电机支架(102)固定在髋关节移动板(120)上;髋关节调节电机(101)与第三电机支架(102)固定连接,髋关节调节电机(101)输出轴与第三预紧力调节螺栓(104)配合;
9、髋部r包括顶盖(131)、旋转电机输出轴(132)、轴承外壳1(133)、收展电机后壳(134)、旋转电机(135)、旋转轴底盖(136)、旋转轴(137)、轴承外壳2(138)、收展电机前壳(139)、后外壳(140)、前外壳(141)、中心支架(142)、收展电机(143)、旋转轴底盖(144)、第六弹簧(145)、旋转轴承(146)、双轴连接件(147)、收展轴(148)、收展轴承(149);
10、双轴连接件(147)上方与旋转轴底盖(144)左侧配合、双轴连接件(147)下方与旋转轴底盖(136)左侧配合;轴承外壳2(138)与第一轴承外壳(133)配合、旋转轴承(146)置于配合体的左侧腔中、收展轴承(149)置于配合体的右侧腔中;旋转电机(135)输出轴与旋转电机输出轴(132)配合,外壳与顶盖(131)相连;旋转电机输出轴(132)固定于旋转轴底盖(144)上方;旋转轴(137)上方穿过旋转轴承(146)与旋转轴底盖(144)下方配合、旋转轴(137)下方与旋转轴底盖(136)配合;收展轴(148)后端与收展电机后壳(134)配合、前端穿过收展轴承(149)、收展电机前壳(139)配合与前外壳(141)左端配合;收展电机(143)输出轴与收展电机(143)背面配合;收展电机后壳(134)与收展电机前壳(139)分别与顶盖(131)前后两排孔位配合;后外壳(140)左端与旋转电机(135)外壳配合,后外壳(140)右端与中心支架(142)配合、前外壳(141)右端与中心支架(142)配合;
11、髋部r与髋部l通过中心支架(142)两侧分别与左右髋部的前外壳(141)和后外壳(140)配合,髋部r与髋关节r通过双轴连接件(147)孔位与髋关节主板(123)上方孔位配合,髋关节r与膝关节r通过髋关节移动(120)两侧孔位与膝关节移动板(83)两侧孔位配合,膝关节r与踝关节r通过膝关节支撑板(80)上方孔位与踝关节移动板(41)上方孔位配合;
12、髋部r与髋部l相同方式配合,髋部l相较于髋部r少了中心支架(142),髋关节l与髋关节r相同方式配合,膝关节l与膝关节r相同方式配合,踝关节l与踝关节r相同方式配合。
13、进一步,所述踝关节r、膝关节r和髋关节r的工作模式一致,踝关节r在工作模式下,踝关节移动板(41)绕中心旋转,带动固定在踝关节主板(6)上的踝关节外齿条(23)旋转,踝关节小齿轮(24)与踝关节外齿条(23)啮合,踝关节小齿轮(24)转动并拉伸第一弹簧(10)、第二弹簧(18),第一弹簧(10)、第二弹簧(18)产生弹簧力作用于踝关节小齿轮(24)轴,通过齿轮间的啮合,作用于踝关节移动板(41),且越偏离零初始位置,第一弹簧(10)、第二弹簧(18)产生的弹簧力力矩越大;同时通过电机输出力矩补偿弹簧力矩使其拟合期望的人体关节力矩轨迹。
14、进一步,预紧力调节器处设置电机,根据情况对预紧力实时调整;能在不需要弹簧的情况下将预紧力调节器调至最高,使弹簧松弛。
15、进一步,齿轮啮合的零力矩位置并非垂直方向上的零点位置,而是根据关节力矩曲线零力矩位置来进行一定角度的偏移。
16、本发明一种主被动混合驱动型下肢双足机器人结构体的优点在于:
17、(1)设计一种主被动结合型双足人形机器人,一方面通过电机的主动控制实现人形机器人步态的自适应切换,另一方面通过一套紧凑的被动机构平衡人形机器人行走时下肢关节所需承受的自身重力力矩,进而减小关节处电机所需要的驱动力矩,能很好的实现轻便紧凑、高效率和长续航的人形机器人设计。
18、(2)本发明采用主被动结合混合驱动方式,利用弹簧提供各关节所需承担的机器人自身重力力矩,利用电机补偿人形机器人运动过程中弹簧力之外的驱动力,一方面减小了对电机功率的需求,提高了机器人续航能力,另一方面实现了机器人步态的自由主动切换。
19、(3)本发明采用电机控制调节弹簧预紧力大小,可以更好地实现弹簧力矩曲线在行走阶段的调节,实现不同步态下对人体行走所需力矩曲线的最佳拟合,最大程度降低对电机力矩的需求。
20、(4)本发明通过弹簧齿轮机构,实现弹簧内置,同时关节处电机采用盘式电机,使得机器人整体结构更加紧凑,减小了机器人整体体积。
21、(5)本发明在各关节移动板和主板之间设计一系列安装孔,实现关节处弹簧力矩零力矩点位置可调,更好的切合不同步态下关节力矩轨迹的变化。
- 还没有人留言评论。精彩留言会获得点赞!