一种基于不完全齿轮与齿条啮合的仿生青蛙跳跃机器人
本发明属于仿生机器人,具体为一种基于不完全齿轮与齿条啮合的仿生青蛙跳跃机器人。
背景技术:
1、随着当前机器人技术的发展,机器人可以完成许多人类所不能完成的任务,例如:太空探索、抢险救灾、精密操作或是承受高负荷的工作量等。仿生机器人是通过从生物体上学习其生物特性:灵活性、生物运动特性、环境自适性等一系列的优秀特质,从而对原有的机械化设备进行改造使其具备最合理、最有优势的结构特点。例如,现有研究者通过分析猫在爬墙过程中其半身的结构,研制了一种机器猫,其跳跃动作不追求运动中整体达到的高度,而是像猫那样通过四肢的协调动作越过障碍物。对于仿生青蛙机器人,由于青蛙的独特骨骼结构及其出色的腿部力量,所以仿生青蛙机器人具有卓越的越障能力和良好的机动性能,因此受到更多科研工作者的关注。在目前市面上的仿青蛙机器人,多半都是通过齿轮组实现跳跃,但其机械零件数目较多,结构较为复杂,使得自身重量加大,造成跳起后在空中重心不稳易导致侧翻。现有技术中的仿生青蛙机器人还存在弹跳能力不足,故障率较高,传动不灵活的现象。
技术实现思路
1、针对现有技术存在的上述问题,本发明的目的是提供一种基于不完全齿轮与齿条啮合的仿生青蛙跳跃机器人,可实现不停向前跳跃,落地平稳,所述机器人结构简单紧凑,传动蓄力灵活高效,零件数目少,便于拆装,具备很强的弹跳能力。
2、为了实现上述目的,本发明所采用的技术方案是:
3、一种基于不完全齿轮与齿条啮合的仿生青蛙跳跃机器人,包括躯体部、前肢部、后肢部、后腿蓄力导向部、齿条,躯体部模仿青蛙的躯体,前肢部模仿青蛙的前腿和前掌,后腿部模仿青蛙的后腿和后掌,躯体部包括外壳和设在外壳内的驱动机构,所述驱动机构通过带动齿条为后腿蓄力导向部积蓄势能,所述后腿蓄力导向部通过释放势能实现所述机器人的跳跃并为后肢部的跳跃进行导向。
4、作为上述技术方案的进一步改进:
5、外壳内设有机体,所述前肢部包括两条前肢,所述前肢的一端铰接在机体上、另一端支撑在地面上,所述后肢部包括两条后肢,所述后肢的一端铰接在机体上、另一端支撑在地面上,所述前肢和后肢上都设置有至少一个转动副,使所述前肢和后肢形成多节式可弯曲和伸展的结构。
6、所述驱动机构包括舵机、舵机齿轮和不完全齿轮,舵机通过舵机齿轮传递驱动至不完全齿轮,齿条的一端衔接不完全齿轮、另一端固定连接所述后肢部,随着不完全齿轮的周期性转动,齿条交替啮合不完全齿轮和脱离与不完全齿轮的啮合。
7、所述后腿蓄力导向部包括蓄力弹簧、导杆和紧固环,导杆的一端连接所述后肢部、另一端穿过机体后固定连接可防止导杆脱离机体的紧固环,蓄力弹簧位于机体和所述后肢部之间、套接在导杆外。
8、所述后腿蓄力导向部还包括可调节套筒,可调节套筒套接在导杆外,可调节套筒的一端连接机体、另一端连接蓄力弹簧,蓄力弹簧的另一端连接所述后肢部,可调节套筒的长度可调。
9、所述驱动机构还包括前传动轴、后传动轴和双齿轮轴,前传动轴和后传动轴平行间隔布置且各自可转动地安装在机体上,不完全齿轮安装在前传动轴上,双齿轮轴安装在后传动轴上,双齿轮轴上设有两个外径不同的齿轮,其中一个和不完全齿轮啮合、另一个和舵机齿轮啮合。
10、每条所述前肢包括减震弹簧以及依次铰接的上臂杆、前臂杆和前掌,上臂杆的远离前臂杆的一端通过铰接件铰接在机体上,减震弹簧的两端分别连接前臂杆的中部和上臂杆的中部,前掌支撑在地面上。
11、每条所述后肢包括依次铰接的衔接杆、大腿杆、小腿杆和后掌,衔接杆的远离大腿杆的一端铰接在机体上,后掌支撑在地面上,大腿杆、小腿杆和后掌连接成u形,且u形开口朝向所述前肢。
12、两条后肢的两个后掌一体连接或固定连接。
13、所述后腿蓄力导向部设有两个,两个后腿蓄力导向部分别连接两条所述后肢。
14、本发明的有益效果是:
15、1、本方案采用三级传动,首先通过舵机带动两级齿轮将动力传递到不完全齿轮上,再通过不完全齿轮与齿条啮合,将舵机的旋转运动转换为齿条的直线运动,通过齿条对机体的反作用压缩蓄力弹簧,当不完全齿轮旋转到空齿位置,被压缩的蓄力弹簧迅速释放,后腿迅速绷直,实现向前跳跃动作,所述机器人结构简单紧凑,传动蓄力灵活高效,零件数目少,便于拆装,具备很强的弹跳能力。
16、2、前腿的上臂杆上端与机体铰接,使得前腿与机体角度可自适应调节,便于寻找仿生青蛙跳跃机器人的最佳跳跃姿势,上臂杆与前臂杆之间连接有减震弹簧,从而实现落地平稳,有效适用于多种复杂的地形。
17、3、机体可通过导杆和齿条的导向作用实现前后移动,导杆前段安装的两个紧固环在释放终了时与机体前端面刚性碰撞,为所述机器人的跳跃提供反作用力,可调节套筒可实现在不改变仿生青蛙跳跃机器腿部尺寸结构的条件下,改变可调节套筒长度从而实现弹跳力的可调节,结构合理、易调节蓄力弹簧蓄力。
18、4、通过不完全齿轮周期性的与齿条啮合和脱离啮合实现所述机器人的不停向前跳跃,前肢部和后肢部的收缩与伸展灵活迅速,两个后掌一体式连接,保证两个后掌的动作一致,落地更平稳。
技术特征:
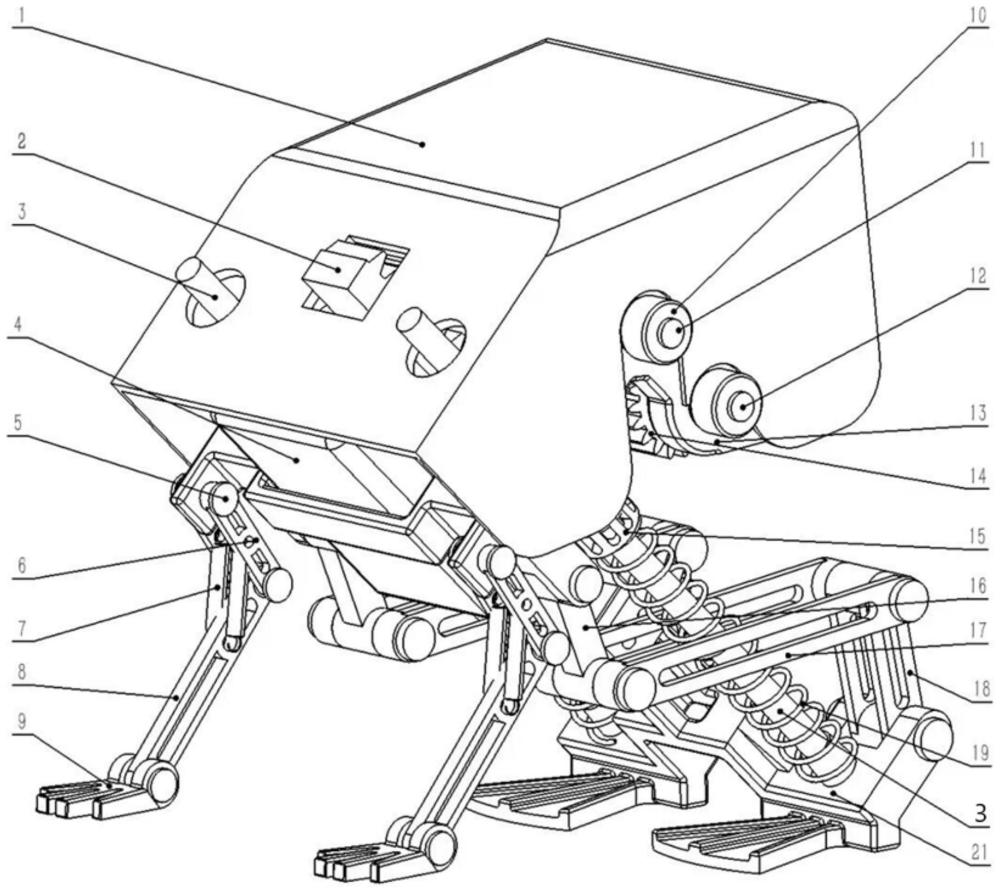
1.一种基于不完全齿轮与齿条啮合的仿生青蛙跳跃机器人,其特征在于,包括躯体部、前肢部、后肢部、后腿蓄力导向部、齿条(2),躯体部模仿青蛙的躯体,前肢部模仿青蛙的前腿和前掌,后腿部模仿青蛙的后腿和后掌,躯体部包括外壳(1)和设在外壳(1)内的驱动机构,所述驱动机构通过带动齿条(2)为后腿蓄力导向部积蓄势能,所述后腿蓄力导向部通过释放势能实现所述机器人的跳跃并为后肢部的跳跃进行导向。
2.根据权利要求1所述的机器人,其特征在于:外壳(1)内设有机体(13),所述前肢部包括两条前肢,所述前肢的一端铰接在机体(13)上、另一端支撑在地面上,所述后肢部包括两条后肢,所述后肢的一端铰接在机体(13)上、另一端支撑在地面上,所述前肢和后肢上都设置有至少一个转动副,使所述前肢和后肢形成多节式可弯曲和伸展的结构。
3.根据权利要求2所述的机器人,其特征在于:所述驱动机构包括舵机(23)、舵机齿轮(24)和不完全齿轮(22),舵机(23)通过舵机齿轮(24)传递驱动至不完全齿轮(22),齿条(2)的一端衔接不完全齿轮(22)、另一端固定连接所述后肢部,随着不完全齿轮(22)的周期性转动,齿条(2)交替啮合不完全齿轮(22)和脱离与不完全齿轮(22)的啮合。
4.根据权利要求3所述的机器人,其特征在于:所述后腿蓄力导向部包括蓄力弹簧(19)、导杆(3)和紧固环(10),导杆(3)的一端连接所述后肢部、另一端穿过机体(13)后固定连接可防止导杆(3)脱离机体(13)的紧固环(10),蓄力弹簧(19)位于机体(13)和所述后肢部之间、套接在导杆(3)外。
5.根据权利要求4所述的机器人,其特征在于:所述后腿蓄力导向部还包括可调节套筒(15),可调节套筒(15)套接在导杆(3)外,可调节套筒(15)的一端连接机体(13)、另一端连接蓄力弹簧(19),蓄力弹簧(19)的另一端连接所述后肢部,可调节套筒(15)的长度可调。
6.根据权利要求3所述的机器人,其特征在于:所述驱动机构还包括前传动轴(11)、后传动轴(12)和双齿轮轴(14),前传动轴(11)和后传动轴(12)平行间隔布置且各自可转动地安装在机体(13)上,不完全齿轮(22)安装在前传动轴(11)上,双齿轮轴(14)安装在后传动轴(12)上,双齿轮轴(14)上设有两个外径不同的齿轮,其中一个和不完全齿轮(22)啮合、另一个和舵机齿轮(24)啮合。
7.根据权利要求1~6任一所述的机器人,其特征在于:每条所述前肢包括减震弹簧(7)以及依次铰接的上臂杆(6)、前臂杆(8)和前掌(9),上臂杆(6)的远离前臂杆(8)的一端通过铰接件(5)铰接在机体(13)上,减震弹簧(7)的两端分别连接前臂杆(8)的中部和上臂杆(6)的中部,前掌(9)支撑在地面上。
8.根据权利要求1~6任一所述的机器人,其特征在于:每条所述后肢包括依次铰接的衔接杆(16)、大腿杆(17)、小腿杆(18)和后掌(21),衔接杆(16)的远离大腿杆(17)的一端铰接在机体(13)上,后掌(21)支撑在地面上,大腿杆(17)、小腿杆(18)和后掌(21)连接成u形,且u形开口朝向所述前肢。
9.根据权利要求8所述的机器人,其特征在于:两条后肢的两个后掌(21)一体连接或固定连接。
10.根据权利要求8所述的机器人,其特征在于:所述后腿蓄力导向部设有两个,两个后腿蓄力导向部分别连接两条所述后肢。
技术总结
本发明公开了一种基于不完全齿轮与齿条啮合的仿生青蛙跳跃机器人,包括躯体部、前肢部、后肢部、后腿蓄力导向部、齿条,躯体部模仿青蛙的躯体,前肢部模仿青蛙的前腿和前掌,后腿部模仿青蛙的后腿和后掌,躯体部包括外壳和设在外壳内的驱动机构,所述驱动机构通过带动齿条为后腿蓄力导向部积蓄势能,所述后腿蓄力导向部通过释放势能实现所述机器人的跳跃并为后肢部的跳跃进行导向。本发明可实现不停向前跳跃,落地平稳,所述机器人结构简单紧凑,传动蓄力灵活高效,零件数目少,便于拆装,具备很强的弹跳能力。
技术研发人员:李树健,吴群彬,王小华,崔欢,吴亦隽,唐瑶
受保护的技术使用者:湖南科技大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!