一种多旋翼无人机海上着艇充电装置及充电方法与流程
[0001]
本发明涉及多旋翼无人机配套技术领域,尤其是涉及一种多旋翼无人机海上着艇充电装置及充电方法。
背景技术:
[0002]
近年来,无人机技术飞速发展,其中多旋翼无人机在各个领域有广泛应用。在军事领域,多旋翼无人机执行侦察任务,覆盖范围大,侦察信息多样,还极大地保证了士兵的生命安全;在民用领域,多旋翼无人机在电网巡查、农业喷洒农药和森林监控方面都得到了应用。
[0003]
但是,在多旋翼无人机的应用中普遍存在续航比较差的情况,这极大的限制了多旋翼无人机的飞行半径。现在国家大力发展海洋事业,如果多旋翼无人机的续航问题能得到较好的解决,多旋翼无人机在海洋搜救、目标侦察方面都会有极好的应用。
技术实现要素:
[0004]
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种多旋翼无人机海上着艇充电装置及充电方法。
[0005]
本发明的目的可以通过以下技术方案来实现:
[0006]
一种多旋翼无人机海上着艇充电装置,包括无人船本体,所述的无人船本体上设有充电仓、停机平台和移动轨道,所述的充电仓内设有充电结构,所述的停机平台可移动式设置在所述的移动轨道上,所述的移动轨道部分位于充电仓内,部分位于充电仓外,所述的移动轨道用于停机平台在充电仓内、外的移动运输,所述的停机平台为可在自身所在平面做360
°
旋转运动的旋转式平台,所述的停机平台连接有位姿调节控制器。
[0007]
优选地,所述的充电仓包括仓体,所述的仓体外设有防雨结构,所述的充电结构设置在仓体内。
[0008]
优选地,所述的充电结构包括无人机固定卡口和无线充电器,所述的无人机固定卡口固定在充电仓内部壁面上形成充电位,所述的无线充电器设置在该充电位处。
[0009]
优选地,所述的移动轨道包括横向轨道和纵向轨道,所述的纵向轨道沿无人船本体中轴线方向从充电仓外部向内部延伸铺设,所述的横向轨道设置在充电仓外部并与所述的纵向轨道垂直。
[0010]
优选地,所述的停机平台为圆形平台。
[0011]
优选地,所述的停机平台为电磁吸盘,当所述的电磁吸盘通电上磁之后产生的磁场吸附多旋翼无人机。
[0012]
优选地,所述的位姿调节控制器包括设置在停机平台上用于获取多旋翼无人机初始位姿的摄像头以及根据初始位姿计算停机平台旋转角度、在移动轨道上移动位移的中控器,所述的控制器连接停机平台的驱动执行组件。
[0013]
优选地,所述的充电结构设置多个,进而所述的停机平台对应设置多个,形成多充
电为结构。
[0014]
一种多旋翼无人机海上着艇充电方法,该方法基于所述的充电装置,具体为:
[0015]
首先,根据无人船和多旋翼无人机的交互,多旋翼无人机进入无人船所在海域的基本空域内;
[0016]
然后,多旋翼无人机对停机平台进行定位,调整多旋翼无人机自身位置进入停机平台上方指定空域并悬停在停机平台上空;
[0017]
最后,启动停机平台吸附多旋翼无人机,位姿调节控制器调节停机平台位姿并移动至充电仓内的充电结构位置处,启动充电。
[0018]
优选地,位姿调节控制器调节停机平台位姿的具体过程是:在多旋翼无人机吸附于停机平台前获取多旋翼无人机的初始位姿,根据多旋翼无人机的初始位姿计算停机平台的旋转角度以及移动位移量,根据旋转角度控制停机平台旋转,同时根据移动位移量控制停机平台在移动轨道上的移动,最后使得停机平台运动至充电仓内的充电结构位置处。
[0019]
与现有技术相比,本发明具有如下优点:
[0020]
(1)该用于多旋翼无人机远海任务中途充电的多旋翼无人机海上着艇充电装置,结构简单,原理清晰,可操作性强,可安装于各种大小型船舶尾端;
[0021]
(2)该系统在存在较明显晃动的环境中具有较大优势,一方面通过磁力助力无人机降落在指定区域内可减小误差,另一方面通过磁力固定无人机或释放无人机便于操作;
[0022]
(3)该系统通过无线充电模式为无人机充电,在实现无人机的能源补给的同时还充分保证了安全;
[0023]
(4)本发明装置能够提高多旋翼无人机在远海作业尤其是海上搜救作业的效率,拓展了多旋翼无人机海上应用范围。
附图说明
[0024]
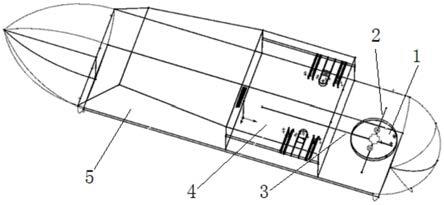
图1为本发明多旋翼无人机海上着艇充电装置的整体结构示意图;
[0025]
图2为本发明充电部分的结构示意图;
[0026]
图3为本发明停机平台电磁吸盘的磁场分布图;
[0027]
图4为本发明多旋翼无人机海上着艇充电方法的流程图。
[0028]
图中,1为停机平台,2为横向轨道,3为纵向轨道,4为充电仓,5为无人船本体,11为平台基座,12为摄像头,41为防雨结构,42为无线充电器,43为无人机固定卡口。
具体实施方式
[0029]
下面结合附图和具体实施例对本发明进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本发明并不意在对其适用物或其用途进行限定,且本发明并不限定于以下的实施方式。
[0030]
实施例
[0031]
如图1,图2所示,一种多旋翼无人机海上着艇充电装置,包括无人船本体5,无人船本体5上设有充电仓4、停机平台1和移动轨道,充电仓4内设有充电结构,停机平台1可移动式设置在移动轨道上,移动轨道部分位于充电仓4内,部分位于充电仓4外,移动轨道用于停机平台1在充电仓4内、外的移动运输,停机平台1为可在自身所在平面做360
°
旋转运动的旋
转式平台,停机平台1连接有位姿调节控制器。
[0032]
充电仓4包括仓体,仓体外设有防雨结构41,充电结构设置在仓体内。
[0033]
充电结构包括无人机固定卡口43和无线充电器42,无人机固定卡口43固定在充电仓4内部壁面上形成充电位,无线充电器42设置在该充电位处。
[0034]
移动轨道包括横向轨道2和纵向轨道3,纵向轨道3沿无人船本体5中轴线方向从充电仓4外部向内部延伸铺设,横向轨道2设置在充电仓4外部并与纵向轨道3垂直。纵向轨道3的长度限制了停机平台1纵向可移动的最大距离,横向轨道2的长度限制了停机平台1横向可移动的最大距离,纵向轨道3的后2/3部分位于充电仓4内部。
[0035]
停机平台1为圆形平台,包括平台基座11,平台基座11表面设置电磁吸盘,当电磁吸盘通电上磁之后产生的磁场吸附多旋翼无人机,电磁吸盘的磁场分布如图3所示。
[0036]
位姿调节控制器包括设置在停机平台1上用于获取多旋翼无人机初始位姿的摄像头12以及根据初始位姿计算停机平台1旋转角度、在移动轨道上移动位移的中控器,控制器连接停机平台1的驱动执行组件。本实施例中在停机平台1上设置两个广角摄像头,两个广角摄像头关于停机平台1的中心点对称,两个广角摄像头之间的距离小于多旋翼无人机任意两个角之间的距离,单个广角摄像头的可视范围大于停机平台1。通过停机平台1上的广角摄像头扫描多旋翼无人机底部的qr码确定多旋翼无人机与停机平台1的相对位置,从而得到多旋翼无人机的初始位姿。
[0037]
如图4所示,一种多旋翼无人机海上着艇充电方法,该方法基于充电装置,具体为:
[0038]
首先,根据无人船和多旋翼无人机的交互,多旋翼无人机进入无人船所在海域的基本空域内;
[0039]
然后,多旋翼无人机对停机平台1进行定位,调整多旋翼无人机自身位置进入停机平台1上方指定空域(停机平台1上空误差允许范围内的空域)并悬停在停机平台1上空;
[0040]
最后,对电磁吸盘通电上磁,产生的磁场吸附多旋翼无人机,采用此种方式一方面用于多旋翼无人机降落的误差矫正,另一方面用于固定多旋翼无人机和无人船的相对位姿,防止因海况恶劣导致的无人船剧烈晃动带来的多旋翼无人机位置改变,位姿调节控制器调节停机平台1位姿并移动至充电仓4内的充电结构位置处,启动充电。其中,位姿调节控制器调节停机平台1位姿的具体过程是:在多旋翼无人机吸附于停机平台1前获取多旋翼无人机的初始位姿,根据多旋翼无人机的初始位姿计算停机平台1的旋转角度以及移动位移量(包括横向平移量和纵向平移量),此处用于调整停在停机平台1上的多旋翼无人机的朝向,其调整目标是将多旋翼无人机的朝向调整至与无人船的朝向一致,根据旋转角度控制停机平台1旋转,同时根据移动位移量控制停机平台1在移动轨道上的移动,最后使得停机平台1运动至充电仓4内的充电结构位置处。充电完毕后,停机平台1承载多旋翼无人机运动至充电仓4外部,多旋翼无人机起飞离开停机平台1。
[0041]
该实施例中充电结构设置1个,从而只能提供1架旋翼无人机的充电,需要说明的是充电结构还可设置多个,进而停机平台1对应设置多个,形成多充电为结构。作为另一个优选实施例,该实施例采用两个停机平台1模式,在此结构中,可设置两个充电结构,沿纵向轨道3方向分布,通过移动轨道设置两组,分别用于两个停机平台1的独立移动,互补干涉。在此结构下,可将多旋翼无人机降落与起飞分开进行,可保证一船载两台多旋翼无人机出海,同一时间至少有一架多旋翼无人机工作。
[0042]
上述实施方式仅为例举,不表示对本发明范围的限定。这些实施方式还能以其它各种方式来实施,且能在不脱离本发明技术思想的范围内作各种省略、置换、变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1