一种海洋资源探测与取样装置的制作方法
一种海洋资源探测与取样装置
[0001]
原案申请号:2018109678456原案申请日:2018年8月23日原案申请人:东莞市凯勒帝数控科技有限公司。
技术领域
[0002]
本发明涉及水下机器人用投放与回收设备领域,尤其涉及一种海洋资源探测与取样装置。
背景技术:
[0003]
随着陆地资源不断的消耗,人们将目光转向了海洋,通过水下机器人对海洋的资源进行探测,现在的水下机器人的投放是直接抛落到海洋里,且回收时,通过牵引绳直接将水下机器人打捞起来,然后就不再进行处理。
[0004]
现在的水下机器人的投放与回收装置,有这样的缺点,不方便对不同型号水下机器人进行固定,且固定杆的角度不能进行调节,并且打捞水下机器人时容易产生晃动,而且不能将水下机器人的移至船板上,同时不方便控制固定杆的角度的固定,因此要对现在的海洋资源探测与取样且辅助人类探知未知领域的装置进行改进。
技术实现要素:
[0005]
本发明的目的在于提供一种海洋资源探测与取样装置,以解决上述背景技术中提出的现有的海洋资源探测与取样且辅助人类探知未知领域的装置在使用时对钻头散热效果不好,不能对钻头进行保护,往往会发生钻头打滑导致钻头断裂的现象,不能对装置和钢轨更好的进行固定和装置在使用时会产生较强的震感的问题。
[0006]
为了实现以上目的,本发明采用的技术方案为:一种海洋资源探测与取样装置,包括底座(1)、连接螺丝(2)、固定架(3)、固定槽(4)、旋转机构(5)、调节机构(6)、回收机构(7)和投放机构(8),所述底座(1)的内部连接有连接螺丝(2),且底座(1)的一侧设置有固定架(3),所述固定架(3)的内侧设置有固定槽(4),所述旋转机构(5)设置在底座(1)的上方,且旋转机构(5)的左侧设置有调节机构(6),所述回收机构(7)设置在旋转机构(5)的上方,所述投放机构(8)设置在回收机构(7)的左下角。
[0007]
进一步的,所述旋转机构(5)包括旋转底座(51)、第一主轴(52)、第一齿轮(53)、活动槽(54)、第一连接杆(55)、旋转盘(56)和连接槽(57),所述旋转底座(51)安装在底座(1)的远离地面的一端,旋转底座(51)的内部设置有第一主轴(52),且第一主轴(52)上设置有第一齿轮(53),旋转底座(51)的右侧设置有活动槽(54),第一连接杆(55)连接在第一齿轮(53)上,旋转盘(56)设置在旋转底座(51)的上方,且旋转盘(56)的下方设置有连接槽(57),连接槽(57)的一侧连接有第一齿轮(53)。
[0008]
进一步的,所述调节机构(6)包括固定杆(61)、调节槽(62)、第一齿槽(63)、第二主轴(64)、第二齿轮(65)、固定盘(66)、第一滑槽(67)、滑块(68)、第二齿槽(69)、第三主轴
(610)、第三齿轮(611)和第二连接杆(612),所述固定杆(61)固定在旋转盘(56)的外侧,固定杆(61)固定在调节槽(62)的左侧,且调节槽(62)的内部设置有第一齿槽(63),第二主轴(64)上固定有第二齿轮(65),且第二齿轮(65)一侧和第一齿槽(63)相连,第二主轴(64)的一侧设置有固定盘(66),且固定盘(66)的内部设置有第一滑槽(67),第一滑槽(67)的内部连接有滑块(68),且滑块(68)的右侧设置有第二齿槽(69),滑块(68)的一侧设置有第二齿轮(65),且第二齿轮(65)另一侧面连接有第二齿槽(69),第二齿轮(65)的下方连接有第三主轴(610),且第三主轴(610)上设置有第三齿轮(611),第三齿轮(611)一侧和第二齿轮(65)连接,且第三齿轮(611)上设置有第二连接杆(612)。
[0009]
进一步的,所述回收机构(7)包括回收电机(71)、牵引绳(72)、定滑轮(73)、固定杆(74)、滑轮(75)、连接杆(76)、合并器(77)、进绳口(78)和出绳口(79),所述回收电机(71)设置在旋转盘(56)远离地面的一端,回收电机(71)上连接有牵引绳(72),且牵引绳(72)设置在定滑轮(73)的上方,固定杆(74)之间设置有滑轮(75),且滑轮(75)的一侧面设置有合并器(77),滑轮(75)的斜角上设置有进绳口(78),连接杆(76)的上方设置有合并器(77),且合并器(77)的下方设置有进绳口(78),合并器(77)的上方设置有出绳口(79)。
[0010]
进一步的,所述投放机构(8)包括固定板(81)、第二滑槽(82)、活动口(83)、第一固定夹(84)、第二固定夹(85)、液压杆(86)和连接卡(87),所述固定板(81)固定在固定杆(74)的一端,固定板(81)的内部设置有第二滑槽(82),且第二滑槽(82)的下方设置有活动口(83),第一固定夹(84)安装在第二滑槽(82)的内部,且第一固定夹(84)的同一侧设置有第二固定夹(85),第一固定夹(84)和第二固定夹(85)之间设置有液压杆(86),且第一固定夹(84)和第二固定夹(85)之间通过连接卡(87)连接。
[0011]
进一步的,所述第一主轴(52)和第一齿轮(53)之间为旋转结构,且第一齿轮(53)和连接槽(57)构成啮合结构,并且连接槽(57)和旋转盘(56)为一体结构,而且旋转盘(56)下方的外部尺寸和旋转底座(51)的内部尺寸相吻合。
[0012]
进一步的,所述调节槽(62)截面为圆形,且调节槽(62)的内部均匀分布有第一齿槽(63),并且第一齿槽(63)之间的齿距和第二齿轮(65)之间的齿距大小相同。
[0013]
进一步的,所述滑块(68)和第一滑槽(67)之间构成滑动结构,且滑块(68)右侧的内部半径和第二齿轮(65)半径大小相同,并且第二齿轮(65)和第二齿槽(69)之间构成卡合结构。
[0014]
进一步的,所述滑轮(75)设置有两个,且滑轮(75)关于合并器(77)构成对称结构,并且滑轮(75)的宽度和进绳口(78)的宽度相同,而且合并器(77)顶部中心位置设置有出绳口(79)。
[0015]
进一步的,所述固定板(81)内部设置有2个第二滑槽(82),且第二滑槽(82)和第一固定夹(84)构成滑动结构,并且第一固定夹(84)和第二固定夹(85)大小相同,而且第一固定夹(84)和第二固定夹(85)之间构成旋转结构,同时第一固定夹(84)和第二固定夹(85)中心位置设置有连接卡(87)。
[0016]
本发明的有益效果为:1、设置有固定架和固定槽,通过固定架和固定槽,将备用的第一连接杆进行固定,使第一连接杆发生损坏,不能进行使用的时候,将备用的第一连接杆从固定槽抽出,进行使用。
[0017]
2、设置有第一主轴、第一齿轮和活动槽,通过将第一齿轮固定在第一主轴上,设置
的活动槽不影响第一连接杆进行旋转,通过对第一连接杆进行旋转,进而使第一连接杆带动第一齿轮进行旋转,旋转到指定位置时,可以将第一连接杆从第一齿轮抽出,方便收纳,当第一连接杆发生损坏时,同理可以将第一连接杆从第一齿轮抽出,又因为第一齿轮上设置有通孔,能对第一齿轮进行固定,所以能对第一连接杆进行更换。
[0018]
3、设置有调节槽、第一齿槽和第二齿轮,通过第二齿轮旋转,因为调节槽内部的第一齿槽和第二齿轮是相啮合的,所以通过第二齿轮旋转,可以使调节槽进行旋转,进而使固定杆的角度改变。
[0019]
4、设置有回收电机、牵引绳和定滑轮,通过启动回收电机,使回收电机旋转,通过定滑轮将牵引绳收回,进而使水下机器人被打捞起,打捞过程更加的方便、快捷。
[0020]
5、设置有第二滑槽、活动口、第一固定夹和第二固定夹,因为第一固定夹和第二固定夹可以在第二滑槽的内部进行滑动,使第一固定夹和第二固定夹下方的距离可以进行改变,方便对不同的水下机器人进行固定。
[0021]
6、设置有第一齿轮、旋转盘和连接槽,通过第一连接杆使第一齿轮旋转,通过第一齿轮带动连接槽,进而使旋转盘在旋转底座上方进行旋转,使固定杆的方向改变,进而将水下机器人移动船板的上方。
[0022]
7、设置有第一齿槽和第二齿轮,因为第一齿槽的齿距和第二齿轮的齿距相同,且二者构成啮合结构,所以通过旋转第二齿轮可以使第一齿槽旋转,进而使调节槽旋转,达到调节固定杆角度的目的。
[0023]
8、设置有第一滑槽、滑块和第二齿槽,当调节好固定杆角度后,通过第一滑槽使滑块滑动,进而使滑块一侧的第二齿槽卡进第二齿轮中,使第二齿轮固定,进而固定固定杆角度,避免第二齿轮因为固定杆重力的原因,导致第二齿轮旋转。
[0024]
9、设置有滑轮和合并器,通过将牵引绳分别固定在两个滑轮的内部,然后再将牵引绳穿进进绳口,从出绳口穿出,使两根牵引绳合并,通过两根牵引绳分别固定在固定板的两头,使打捞水下机器人时,不会发生较大的晃动。
[0025]
10、设置有液压杆,液压杆连接在第一固定夹和第二固定夹之间,通过液压杆伸缩的长度,使第一固定夹和第二固定夹下方打开的距离不同,方便固定不同型号尺寸的水下机器人,该装置更加的实用,使用方便。
附图说明
[0026]
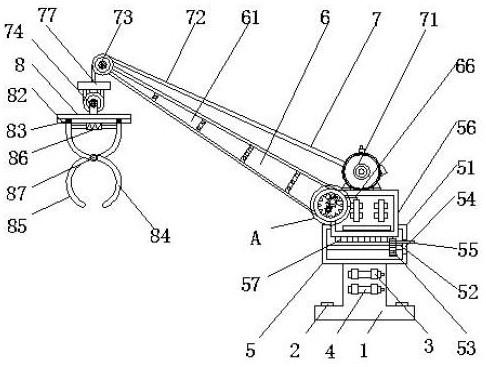
图1为一种海洋资源探测与取样装置的结构示意图;图2为一种海洋资源探测与取样装置的调节槽和第二齿轮连接结构示意图;图3为一种海洋资源探测与取样装置的图1中a处局部放大结构示意图;图4为一种海洋资源探测与取样装置的滑轮和固定板连接结构示意图;图5为一种海洋资源探测与取样装置的图4俯视结构示意图;图6为一种海洋资源探测与取样装置的图4侧视结构示意图。
[0027]
图中所示文字标注表示为:1、底座,2、连接螺丝,3、固定架,4、固定槽,5、旋转机构,51、旋转底座,52、第一主轴,53、第一齿轮,54、活动槽,55、第一连接杆,56、旋转盘,57、连接槽,6、调节机构,61、固定杆,62、调节槽,63、第一齿槽,64、第二主轴,65、第二齿轮,66、固定盘,67、第一滑槽,68、滑块,69、第二齿槽,610、第三主轴,611、第三齿轮,612、第二连接
杆,7、回收机构,71、回收电机,72、牵引绳,73、定滑轮,74、固定杆,75、滑轮,76、连接杆,77、合并器,78、进绳口,79、出绳口,8、投放机构,81、固定板,82、第二滑槽,83、活动口,84、第一固定夹,85、第二固定夹,86、液压杆,87、连接卡。
具体实施方式
[0028]
为了使本领域技术人员更好地理解本发明的技术方案,下面结合附图对本发明进行详细描述,本部分的描述仅是示范性和解释性,不应对本发明的保护范围有任何的限制作用。
[0029]
如图1-图6所示,本发明的具体结构为:一种海洋资源探测与取样装置,包括底座1、连接螺丝2、固定架3、固定槽4、旋转机构5、调节机构6、回收机构7和投放机构8,所述底座1的内部连接有连接螺丝2,且底座1的一侧设置有固定架3,所述固定架3的内侧设置有固定槽4,所述旋转机构5设置在底座1的上方,且旋转机构5的左侧设置有调节机构6,所述回收机构7设置在旋转机构5的上方,所述投放机构8设置在回收机构7的左下角。
[0030]
优选的,所述旋转机构5包括旋转底座51、第一主轴52、第一齿轮53、活动槽54、第一连接杆55、旋转盘56和连接槽57,所述旋转底座51安装在底座1的远离地面的一端,旋转底座51的内部设置有第一主轴52,且第一主轴52上设置有第一齿轮53,旋转底座51的右侧设置有活动槽54,第一连接杆55连接在第一齿轮53上,旋转盘56设置在旋转底座51的上方,且旋转盘56的下方设置有连接槽57,连接槽57的一侧连接有第一齿轮53。
[0031]
优选的,所述调节机构6包括固定杆61、调节槽62、第一齿槽63、第二主轴64、第二齿轮65、固定盘66、第一滑槽67、滑块68、第二齿槽69、第三主轴610、第三齿轮611和第二连接杆612,所述固定杆61固定在旋转盘56的外侧,固定杆61固定在调节槽62的左侧,且调节槽62的内部设置有第一齿槽63,第二主轴64上固定有第二齿轮65,且第二齿轮65一侧和第一齿槽63相连,第二主轴64的一侧设置有固定盘66,且固定盘66的内部设置有第一滑槽67,第一滑槽67的内部连接有滑块68,且滑块68的右侧设置有第二齿槽69,滑块68的一侧设置有第二齿轮65,且第二齿轮65另一侧面连接有第二齿槽69,第二齿轮65的下方连接有第三主轴610,且第三主轴610上设置有第三齿轮611,第三齿轮611一侧和第二齿轮65连接,且第三齿轮611上设置有第二连接杆612。
[0032]
优选的,所述回收机构7包括回收电机71、牵引绳72、定滑轮73、固定杆74、滑轮75、连接杆76、合并器77、进绳口78和出绳口79,所述回收电机71设置在旋转盘56远离地面的一端,回收电机71上连接有牵引绳72,且牵引绳72设置在定滑轮73的上方,固定杆74之间设置有滑轮75,且滑轮75的一侧面设置有合并器77,滑轮75的斜角上设置有进绳口78,连接杆76的上方设置有合并器77,且合并器77的下方设置有进绳口78,合并器77的上方设置有出绳口79。
[0033]
优选的,所述投放机构8包括固定板81、第二滑槽82、活动口83、第一固定夹84、第二固定夹85、液压杆86和连接卡87,所述固定板81固定在固定杆74的一端,固定板81的内部设置有第二滑槽82,且第二滑槽82的下方设置有活动口83,第一固定夹84安装在第二滑槽82的内部,且第一固定夹84的同一侧设置有第二固定夹85,第一固定夹84和第二固定夹85之间设置有液压杆86,且第一固定夹84和第二固定夹85之间通过连接卡87连接。
[0034]
优选的,所述第一主轴52和第一齿轮53之间为旋转结构,且第一齿轮53和连接槽
57构成啮合结构,并且连接槽57和旋转盘56为一体结构,而且旋转盘56下方的外部尺寸和旋转底座51的内部尺寸相吻合。
[0035]
优选的,所述调节槽62截面为圆形,且调节槽62的内部均匀分布有第一齿槽63,并且第一齿槽63之间的齿距和第二齿轮65之间的齿距大小相同。
[0036]
优选的,所述滑块68和第一滑槽67之间构成滑动结构,且滑块68右侧的内部半径和第二齿轮65半径大小相同,并且第二齿轮65和第二齿槽69之间构成卡合结构。
[0037]
优选的,所述滑轮75设置有两个,且滑轮75关于合并器77构成对称结构,并且滑轮75的宽度和进绳口78的宽度相同,而且合并器77顶部中心位置设置有出绳口79。
[0038]
优选的,所述固定板81内部设置有2个第二滑槽82,且第二滑槽82和第一固定夹84构成滑动结构,并且第一固定夹84和第二固定夹85大小相同,而且第一固定夹84和第二固定夹85之间构成旋转结构,同时第一固定夹84和第二固定夹85中心位置设置有连接卡87。
[0039]
具体使用时,先通过液压杆86打开第一固定夹84和第二固定夹85,然后将第一固定夹84和第二固定夹85的开口对准水下机器人,然后再通过液压杆86,使第一固定夹84和第二固定夹85在固定板81内部的第二滑槽82里进行滑动,进而使第一固定夹84和第二固定夹85将水下机器人固定,然后通过旋转第一连接杆55,使第一连接杆55带动第一齿轮53旋转,通过第一齿轮55旋转使连接槽57转动,从而使旋转盘56在旋转底座51内部旋转,通过旋转盘56的旋转,使固定杆61的角度改变,进而使水下机器人离开船板,移动到海面上,然后启动回收电机71,使回收电机71上连接的牵引绳72在定滑轮73上滑动,进而使水下机器人落到海洋中,在液压杆86的作用下,使第一固定夹84和第二固定夹85开口打开,完成对水下机器人的投放,回收水下机器人时,在液压杆86的作用下,使第一固定夹84和第二固定夹85开口打开,将水下机器人固定在第一固定夹84和第二固定夹85内部,然后通过液压杆86,使第一固定夹84和第二固定夹85开口闭合,将水下机器人固定,再通过回收电机71回收牵引绳72,将水下机器人打捞起,牵引绳72在两个滑轮75的作用下,使水下机器人回收时稳定,当水下机器人离开海平面时,旋转第一连接杆55,使第一连接杆55带动第一齿轮53旋转,通过第一齿轮55旋转使连接槽57转动,从而使旋转盘56在旋转底座51内部旋转,通过旋转盘56的旋转,使固定杆61的角度改变,进而使水下机器人离开海面,移动到船板上,然后在通过旋转第二连接杆612,使第三齿轮611带动第二齿轮65旋转,进而使第二齿轮65驱动调节槽62旋转,实现固定杆61角度的改变,当固定杆61角度适宜时,通过第一滑槽67,滑动滑块68,使第二齿槽69卡进第二齿轮65中,对固定杆61角度进行固定,将水下机器人放置到船板上,完成对水下机器人的回收。
[0040]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0041]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本发明的方法及其核心思想,以上所述仅是本发明的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将发明的构
思和技术方案直接应用于其它场合的,均应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1