一种水下航行器的扑翼尾流控制主动减阻方法与流程
[0001]
本发明属于水下航行器减阻技术领域,具体涉及一种水下航行器的扑翼尾流控制主动减阻方法。
背景技术:
[0002]
目前,针对鱼雷、滑翔机等回转体水下航行器的减阻方法,常采用超空泡、沟槽表面、柔性壁面、超疏水表面、微气泡、高分子添加剂等技术。
[0003]
超空泡技术一般用于高航速工况下,且可控性差;超疏水减阻表面的气穴结构在水压的作用下易发生破坏,不适用于水下减阻。沟槽减阻方法的减阻效率相对较差,且沟槽容易被海洋生物附着而失去减阻效果。高分子添加剂主要应用于水下管道等,且应用于水下航行器时存在增大载荷,对环境不友好,添加剂释放困难等因素。
[0004]
前述减阻技术均为被动控制技术,水下航行器机动过程中,减阻效果持续存在,在急速减速过程中,阻力减小将影响减速效果。
技术实现要素:
[0005]
要解决的技术问题
[0006]
为了解决现有方法中减速时机不可控性的问题,本发明提出一种水下航行器的扑翼尾流控制主动减阻方法。弥补了现有水下减阻技术无主动减阻方法的空缺以及被动减阻技术易失效的缺陷。
[0007]
技术方案
[0008]
一种水下航行器的扑翼尾流控制主动减阻方法,其特征在于步骤如下:
[0009]
步骤1:基于已有水下航行器外形特征,获得截面直径d作为特征尺寸,结合航行器巡航速度u0,计算出航行器本地雷诺数;
[0010]
步骤2:根据航行器特征尺寸,选取弦长c=d的naca对称翼型;
[0011]
步骤3:根据雷诺数求出相应截面圆柱脱涡频率f,选取扑动频率f使得扑翼无量纲扑动频率sr=fc/u0取值范围为[0-1],且避免f=f;选取上下震荡幅值a值为[0.1c-1.0c],俯仰运动幅值为θ
max
=π/12;
[0012]
步骤4:将扑翼装置安装距离设定为l=0.5d,安装在航行器轴线位置,采用电机驱动翼型扑动的结构实现减阻;
[0013]
步骤5:采用以下控制率对扑翼运动进行控制:
[0014]
heaving:y=asin(2πft)
[0015]
pitching:θ=θ
max sin(2πf+π/2)
[0016]
式中,y为竖直升沉运动位移,θ为俯仰运动角度。
[0017]
所述步骤2的对称翼型包括naca0020-naca0050。
[0018]
所述步骤4中调整各参数对应关系,扑动频率sr=0.3时,naca0020扑动幅值a范围为[0.1c-0.6c],naca0030扑动幅值a范围为[0.1c-0.7c],而naca0040及naca0050翼型扑动
幅值a范围为[0.1c-0.8c];当sr不取0.3时,naca0020-naca0050各翼型振荡幅值a取为0.5c。
[0019]
有益效果
[0020]
本发明提出的一种水下航行器的扑翼尾流控制主动减阻方法,通过主动控制技术,航行过程中可根据姿态控制要求,随时调整减阻装置的运行,亦可充当鳍舵,提高姿态控制率,节约能源;该方法提出的主动减阻装置为等特征尺寸的机械结构,寿命长,加工安装方便,满足多工况减阻需求。该方法中扑翼装置使得水下航行器尾流得以衰减,实现部分尾流控制效果。
[0021]
基于上述参数方案的设定,所采用的扑翼尾流控制装置安装于航行器轴线位置处,该布局减少水下航行器机动过程中对姿态角等参数的影响。
附图说明
[0022]
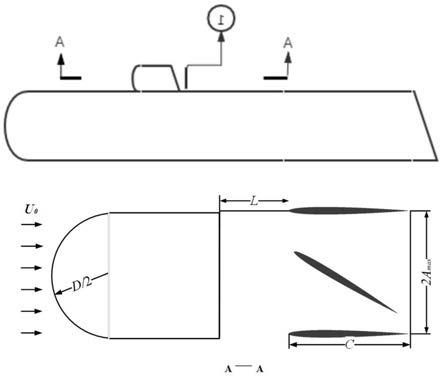
图1为水下航行器的扑翼尾流控制主动减阻装置尺寸参数示意图
[0023]
图2为扑翼控制装置运动参数示意图
具体实施方式
[0024]
现结合实施例、附图对本发明作进一步描述:
[0025]
本发明提供了一种水下航行器的扑翼尾流控制主动减阻方法,包括如下步骤:
[0026]
基于已有水下航行器外形特征,获得截面直径d作为特征尺寸,结合航行器巡航速度u0,计算出航行器本地雷诺数re;
[0027]
根据航行器特征尺寸,选取弦长c=d的naca对称翼型(naca0020-naca0050);
[0028]
根据雷诺数求出相应截面圆柱脱涡频率f。选取扑动频率f,使得扑翼无量纲扑动频率sr=fc/u0取值范围为[0-1],且避免f=f;上下震荡幅值a取值为[0.1c-1.0c],俯仰运动幅值为θ
max
=π/12;
[0029]
该减阻方法采用电机驱动翼型扑动的结构实现减阻效果,且将扑翼装置安装距离设定为l=0.5d,安装在航行器轴线位置;
[0030]
调整各参数对应关系,扑动频率sr=0.3时,naca0020扑动幅值a范围为[0.1c-0.6c],naca0030扑动幅值a范围为[0.1c-0.7c],而naca0040及naca0050翼型扑动幅值a范围为[0.1c-0.8c];当sr不取0.3时,naca0020-naca0050各翼型振荡幅值a取为0.5c。
[0031]
进一步,上述方法中,扑翼运动控制方程确定如下:
[0032]
heaving:y=asin(2πft)
[0033]
pitching:θ=θ
max sin(2πf+π/2)
[0034]
式中,y为竖直升沉运动位移,θ为俯仰运动角度。
[0035]
如图1所示,本发明实施例的水下航行器扑翼尾流控制主动减阻装置1安放于舰桥后,航行过程中,来流绕舰桥形成不同形式涡街的尾涡。安装位置为轴线对称位置,扑翼前缘距上游钝体间距为l=0.5d,d为上游钝体特征尺寸。
[0036]
根据特征尺寸计算当地雷诺数,其中υ为水的运动粘度系数。根据当地雷诺数,得出尾涡脱涡频率f。
[0037]
选取弦长c=d的naca对称翼型,翼型厚度可选取naca0020、naca0030、naca0040以及naca0050等相对厚度较大的标准翼型。
[0038]
在给定翼型弦长情况下,扑动在来流横向运动幅值a选取为弦长c的0.1-1.0倍数,使得扑动运动与来流涡街形成充分交互,从而达到控制尾流尾迹的效用。
[0039]
如图2所示,其运动为正弦周期性扑动运动,其运动的两个分解运动方程表达如下:
[0040]
heaving:y=asin(2πft)
[0041]
pitching:θ=θ
max sin(2πf+π/2)
[0042]
其俯仰分运动幅值θ
max
=π/12,f为扑动频率。
[0043]
周期性运动频率选取根据不同厚度翼型进行限定。首先对无量纲频率计算表达为:sr=fc/u0。其中,u0为水下航行器巡航速度。
[0044]
对于横向运动幅值a限定为a=0.5c的工况,各厚度翼型无量纲扑动频率选取为0.1-1.0时均可达到减阻效果。但应避免扑动频率f=f,来减少对上游结构的振动影响。
[0045]
当固定无量纲扑动频率sr=0.3时,naca0020横向振荡幅值a应取值在范围[0.1c-0.6c]内;naca0030横向振荡幅值a应取值在范围[0.1c-0.7c]内,而naca0040及naca0050翼型扑动幅值a范围为[0.1c-0.8c]。
[0046]
特别地,对于低速小航行器而言,当re为20000,扑动幅值a取为0.1c,无量纲扑动频率sr取为0.3时,该主动减阻装置减阻功率(此处定义为p=delta(drag)*u0)的值可达消耗功率的35倍。
[0047]
进一步,本减阻方法所制装置本身属于增加操纵面的一种形式,其亦可用于操纵性的提升。
[0048]
需要说明的是,尽管本文已经展示并阐述了本发明的实施例,对于本领域的技术及工程人员而言,可以在理解并不脱离本发明原理和精神的情况下,对实施例等进行多样性创作、修改、替换、及变型,本发明的范围由所附权利要求极其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1