一种全海深纯机械定时抛载触发机构的制作方法
[0001]
本发明涉及一种全海深纯机械定时抛载触发机构,属于水下机器人应急抛载技术领域。
背景技术:
[0002]
目前依靠定时手段释放压载的方式有:如授权公告号为cn102323777b,名称为“一种深水auv应急抛载方法”,通过嵌入主控系统中的电子信号来实现定时主动释放抛载,或者当主控系统与嵌入系统的通讯中断时主动释放抛载。该发明采用的依靠电子信号及其通讯中断的触发方式存在以下问题:
①
其定时抛载系统并不独立于auv,并且需要主控系统与抛载系统的通信稳定,影响了抛载的可靠性。
②
并未在专利中看到有关深水大外压问题的处理办法。
[0003]
也有利用纯机械定时方式的抛载结构:如申请公布号为cn109131802a,名称为“一种水下机器人多模式抛载装置”,该结构主要采用一种冗余设计将电磁驱动机构、电机驱动机构、纯机械定时驱动机构共同作用于同一抛载,提高了抛载可靠性。该发明存在以下问题:
①
冗余结构使整体抛载机构变的复杂。
②
发明中未见触发机构至外部抛载的运动传递过程中采用特殊密封设计,不适用于全海深大外压环境。传统的o形圈密封,会在环境大外压作用时被挤压,增大其与接触面产生的摩擦力,全海深环境下该摩擦力巨大,很难克服,无法有效传递触发机构运动。
[0004]
本发明解决了全海深大外压环境下,机械定时抛载触发机构的运动有效传递及可靠密封问题。实现了仅依靠纯机械机构完成触发水下抛载动作,并有效的规避了大外压下密封件会对执行机构产生的巨大摩擦力,更加实现了动作过程中保持密封面不产生相对滑动,提高可密封的可靠性。该发明具有结构简单,可靠性强、可用作于全海深环境的优点,可对全海深环境下作业的水下机器人提供独立、可靠的安全保护。
技术实现要素:
[0005]
本发明的目的是克服传统机械定时抛载触发机构难以应用于全海深大外压环境而提供一种具有特殊密封结构的纯机械定时抛载触发机构,该机构可以平衡环境压力,实现在全海深大外压下仅需较小的机械力驱动即可执行抛载触发动作,且动作过程中不会产生密封面的相对滑动,提高了密封的可靠性。
[0006]
本发明的目的是这样实现的:包括定时器壳体、设置在定时器壳体内的定时器、与定时器壳体端面连接的滑轴壳、设置在滑轴壳内的滑轴、设置在传动轴与定时器壳体之间的发条,定时器的旋转轴通过联轴器连接有传动轴,传动轴一端设置有切面,滑轴上设置有异形键槽,传动轴的切面端与异形键槽配合,滑轴的两端探出至滑轴壳外且探出部分为锥形,滑轴壳的两个对称平面上覆盖有用于滑轴部分密封的橡胶蒙皮,橡胶蒙皮外由滑轴压盖固定,滑轴壳设置在支架上,支架上还设置有执行轴壳,执行轴壳内设置有执行轴,执行轴壳上下两端设置有执行轴堵头,在执行轴一端设置有调整块,调整块与执行轴凸起之间
设置有弹簧,弹簧压缩距离大于执行轴行程距离。
[0007]
本发明还包括这样一些结构特征:
[0008]
1.橡胶蒙皮设计成碗形,碗形的橡胶蒙皮还将滑轴凸出部分包裹。
[0009]
2.滑轴压盖与橡胶蒙皮的压紧面呈环形,且压紧面远离滑轴。
[0010]
3.转动定时器使其开始计时,定时器输出开始转动,并通过联轴器带动传动轴转动;当在传动轴转动到特定位置时,其与滑轴的限位将被解除,使滑轴在滑轴壳中沿滑轴轴向移动;这时执行轴可通过橡胶蒙皮的形变同步解除限位,实现了规定时间后触发执行轴运动的作用。
[0011]
与现有技术相比,本发明的有益效果是:1、与现有技术相比,本发明的有益效果是:本发明采用压力平衡原理,平衡了抛载触发机构的两侧压力,起到了消除了全海深大外压对抛载触发机构动作时的干扰,达到仅需较小的机械驱动力,即可实现抛载触发动作。2、与现有技术相比,本发明的有益效果是:本发明设计一种橡胶蒙皮的密封方式,依靠橡胶形变,在实现了优点1的同时,其密封面上并不产生相对移动,保证了密封的可靠性。3、与现有技术相比,本发明的有益效果是:本发明利用等压平衡原理设计的滑轴密封结构,可完全依靠滑轴的强度来抵抗全海深大外压,并不会将环境力传递到定时器上,为定时器提供了稳定的工作环境,提高了定时触发抛载释放的可靠性。
附图说明
[0012]
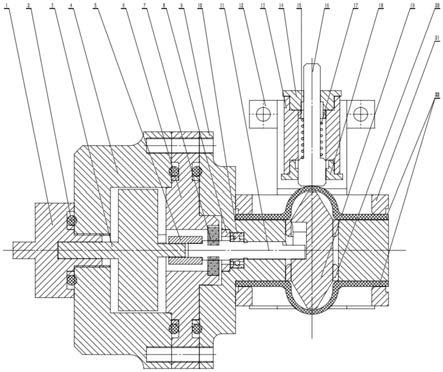
图1为本发明专利的整体剖面示意图。
[0013]
图2为本发明专利的整体等轴测示意图。
[0014]
图3为本发明专利的滑轴示意图。
[0015]
图4为本发明专利的传动轴示意图。
[0016]
图5为本发明专利的滑轴压盖示意图。
具体实施方式
[0017]
下面结合附图与具体实施方式对本发明作进一步详细描述。
[0018]
本发明采用橡胶蒙皮设计滑轴密封结构,该结构可以使抛载机构两侧外压达到平衡,克服了全海深环境对的影响,使仅需弹簧形变作为驱动源即可触发抛载动作,同时,该结构为通过形变来传递运动,避免水下机械运动可能产生的密封面相对滑动。本发明包括增力传动部分、滑轴密封部分以及辅助元件和固定元件:其滑轴密封部分采用橡胶蒙皮覆盖滑轴壳与滑轴并采用滑轴压盖压紧。滑轴两侧探出滑轴壳,且探出部分成锥形。橡胶蒙皮设计成碗形,碗形部分将滑轴凸出部分包裹。滑轴压盖与橡胶蒙皮的压紧面呈环形,且压紧面远离滑轴。
[0019]
定时器的旋转轴通过联轴器与传动轴连接,并在传动轴上安装已经蓄力的发条并使其恢复力的方向与定时器计时转动方向相同。作用及技术效果:放大定时器输出扭矩。传动轴远离定时器一侧有一个切面设计,同时滑轴中也设计一个异形键槽与传动轴配合。作用及技术效果:可以实现当传动轴转动到一定角度的时候在滑轴槽中自由移动。定时器通过定时器上下端盖定位,同时在定时器一侧设计堵头。作用及技术效果:可方便的调整定时器的复位和定时。定时器远离堵头的一侧通过联轴器与传动轴相连接,并在传动轴与滑轴
壳之间设置发条和轴承。作用及技术效果:增加定时器输出扭矩和减少摩擦。在滑轴壳孔与滑轴之间配置减磨垫。作用及技术效果:起到减小滑轴运动摩擦阻力。通过在滑轴壳两个对称平面上覆盖橡胶蒙皮,来对滑轴部分进行密封。作用及技术效果:该密封形式可以平衡全海深两侧外压从而减少所需的驱动力,并且滑轴壳中的滑轴可通过橡胶蒙皮的形变来向外传递运动,避免了密封面的相对滑动,提高了抛载触发机构的可靠性。执行轴壳与滑轴壳被连接在支架上,要保证其弹簧压缩距离大于执行轴行程距离。执行轴安装在执行轴壳中,远离滑轴一侧安装弹簧,并通过执行轴壳与滑轴壳的距离限制使弹簧保持恢复形变趋势。作用及技术效果:可在执行轴解除限位的时候通过弹簧恢复形变产生动作,并达到目标行程。在执行轴一端设计调整块,并配置螺纹副。作用及技术效果:可通过转动调整块来改变弹簧在执行轴壳中的位置。
[0020]
全海深环境下纯机械定时抛载触发机构工作过程如下:
[0021]
首先转动定时器使其开始计时,然后定时器输出开始转动,并通过联轴器带动传动轴转动。当在传动轴转动到特定位置时,其与滑轴的限位将被解除,可使滑轴在滑轴壳中沿滑轴轴向移动。这时执行轴可通过橡胶蒙皮的形变同步解除限位,实现了规定时间后触发执行轴运动的作用。该执行轴与外部抛载块存在配合,其运动可同步触发抛载动作,最终实现水下机器人全海深环境下依靠纯机械定时触发机构完成抛载任务的目的。
[0022]
下面结合附图对本发明专利做进一步详述。分别从整体结构、增力传动部分、滑轴密封部分、其他辅助元件和固定元件部分与实施方式的工作原理5部分进行阐述。
[0023]
整体结构:
[0024]
一种全海深环境下纯机械定时抛载触发机构的整体结构如图1所示,主要由增力传动部分(发条7、传动轴11),滑轴密封部分(包括滑轴壳9、滑轴19、减磨垫20、滑轴压盖21与橡胶蒙皮22),以及辅助元件(包括o型圈2、定时器3、联轴器5、挡片8、轴承10、调整块15、执行轴16、弹簧17)和固定元件(包括定时器堵头1、定时器左端盖4、定时器右端盖6、支撑座12、执行轴壳13、执行轴堵头14,18)组成。
[0025]
增力传动部分:
[0026]
采用联轴器5将定时器3的旋转轴与传动轴11连接。采用销将发条7的内圈固定在传动轴11上,将外圈固定在定时器右端盖6上,并使发条恢复形变的方向与定时器计时转动方向相同,可扩大定时器输出轴转矩。在滑轴壳9与传动轴11之间安装轴承10,采用挡片8进行定位,可减少传动轴11与滑轴壳9之间的摩擦。将堵头、定时器左右端盖4、5及滑轴壳9如图1进行安装,调整定时器3与联轴器5的相对位置,确保定时器3归零或即将归零的时候解除滑轴19的限位,且当给定时器3上紧的时候滑轴19移动被限制,此部分用o型圈完成密封,并用螺丝增加轴向预紧力,压紧o型圈。
[0027]
滑轴密封部分:
[0028]
将减磨垫和滑轴19共同配置在滑轴壳9孔中,其中减磨垫20采用聚四氟乙烯材料并与滑轴壳9成过盈配合,与滑轴19成间隙配合。再如图1所示,将橡胶蒙皮22贴合在滑轴壳9两侧,橡胶蒙皮22碗形结构扣在滑轴19两侧。然后盖上滑轴压盖21,并采用双头螺杆副进行压紧与定位,完成密封安装。
[0029]
其他辅助元件和固定元件部分:
[0030]
如图1,将滑轴堵头14、执行轴壳13、调整块15、弹簧17、滑轴壳堵头18、执行轴16依
次安装,并将执行轴壳13与滑轴壳9通过螺钉连接在支架上,其中弹簧17处于状态并保证其压缩距离大于抛载动作所需的执行轴16行程距离。推动滑轴19置于如图1所处初始位置后,可转动定时器3开始计时,之后通过堵头1压紧o型号圈2完成密封。待定时器3归零,即可带动传动轴11转动,致使滑轴19接触限位,触发执行轴16动作。
[0031]
实施方式的工作原理:
[0032]
定时器计时后其旋转轴开始转动,并带动传动轴转动。当在传动轴转动到特定位置时,其与滑轴的限位将被解除,可使滑轴在滑轴壳中沿滑轴轴向移动,这时给滑轴提供推力的执行轴同步解除限位,实现了规定时间后触发执行轴动作,该执行轴与外部抛载块存在配合,其运动可同步触发抛载动作。
[0033]
综上,本发明专利公开了一种定时抛载触发机构,属于水下机器人应急抛载技术领域,特别是涉及一种可在全海深大外压环境应用的纯机械定时抛载触发机构。该机构结构包括增力传动部分、滑轴密封部分以及辅助元件和固定元件,其中滑轴密封部分为本发明的重点。本发明采用橡胶蒙皮设计抛载触发机构中滑轴密封结构,该结构通过平衡两侧外压,克服了全海深环境下大外压的影响,实现仅需弹簧形变作为驱动源即可完成抛载触发动作。同时,该结构通过形变来传递运动的方式,避免了水下机械运动可能产生的密封面相对滑动,有效的解决了大外压环境下轴向动密封难题。具有结构紧凑,体积小,可靠性强、可用作于全海深环境等优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1