水面垃圾清理无人船的制作方法
1.本发明涉及水面垃圾清理领域,具体涉及一种水面垃圾清理无人船。
背景技术:
2.现有技术中有两种办法对水面固体垃圾进行清理:人工乘船使用渔网进行人工捞取。这种办法大量耗费人力物力,而且效率很低,人工成本高,工作时间受光线和天气限制。市面上存在一些清理水面垃圾的无人化设备,例如公开号为cn108265689a的中国发明专利申请公开了一种河道清理机,机体呈长方体,机体的机壳一侧设有入水管道,机壳内设有控制板、小型水泵、滤网板、电池,小型水泵为泵体;其要点是所述机壳的入水管道两侧对称设有螺旋桨和螺旋桨电机,泵体内设有叶轮电机,螺旋桨电机、叶轮电机通过线路与核心处理部分的控制板连接,泵体的第一入水孔一端与机壳的入水管道连接,泵体的第一入水孔另一端通过泵体的出水孔与滤网板连接,出水孔的孔口高出滤网板的平面,滤网板下方的机壳设有排水孔。该河道清理机漂浮于水面自动行进或遥控行进,垃圾和河水经过泵体排到滤网板上过滤。另外现有技术中多数清理水面垃圾的无人化设备采用人工遥控进行使用,清理效果受操作者操作水平限制,智能化不高。其他智能化的清理水面垃圾的设备体积很大,外观臃肿,只适合捞取污染重的水域面积比较大的水面上的垃圾,不适合捞取公园,校园池塘,景观湖泊等小面积水域的水面漂浮垃圾。
技术实现要素:
3.本发明所要解决的技术问题在于:现有技术中水面垃圾清理不便的技术问题。
4.本发明是通过以下技术手段实现解决上述技术问题的:一种水面垃圾清理无人船,包括设备主体,设备主体前端设置开口,所述设备主体上设置有驱动装置;
5.设备主体中设置有垃圾回收仓,垃圾回收仓前端设置开口,垃圾回收仓的开口位于设备主体的开口中;
6.所述设备主体能够漂浮在水面,垃圾回收仓开口的一部分位于水面以下,另一部分位于水面以上,垃圾回收仓中设置有抽水装置,抽水装置与垃圾回收仓内部空间之间设置有垃圾过滤网,抽水装置能够将垃圾回收仓开口处的水抽至垃圾回收仓内部空间中,并排出至设备主体外部;
7.所述设备主体上还设置有遥控模块和导航模块;
8.还包括控制单元,所述驱动装置、抽水装置均由控制单元控制,所述遥控模块和导航模块均连接至控制单元。
9.本发明中的水面垃圾清理无人船在实际应用时,操作者可通过遥控模块对无人船进行遥控操作,或者,无人船也可通过导航模块进行水面自主导航运行,实际工作时,驱动装置能够驱动整个无人船移动,为其提供动力,当发现水面垃圾时,驱动装置带动无人船移动至垃圾附近,并确保垃圾位于垃圾回收仓开口前方,然后抽水装置开始工作,并将前方的水及垃圾吸入垃圾回收仓内部空间中,水经过垃圾过滤网后排出至设备主体外部,而垃圾
则被垃圾过滤网拦住,进而将垃圾收集在垃圾回收仓内部,相对于现有技术,能够方便的实现水面垃圾清理,减轻劳动强度,清理效率较高,成本低,受环境限制较小,另外其整体结构、原理较为简单,结构紧凑,可适用于公园、校园池塘、景观湖泊等水域,能够实现水面上落叶、柳絮等固体垃圾的收集清理等。可以通过手动遥控或自主导航控制,设备上装有导航模块,可以实时的记录设备所在的位置;设备的位置信息可通过设备中的数传电台传输至后端电脑中,使用者可通过电脑设置设备的行动范围,规划设备的行动路径,以及设备收集垃圾后自动回航的时间以及位置,使设备进行无人化工作。使用者亦可通过电脑中设备的位置,进行手动遥控操作,兼具遥控及自主导航,操作较为智能。
10.优化的,所述设备主体上设置有摄像头。
11.摄像头能够观察水面情况,观察到垃圾后,可控制设备行进至垃圾处并进行收集,摄像头中的图像传输至设备内的控制单元,设备在水面上巡航时可进行垃圾分辨,分辨出垃圾及所在的位置后,将垃圾吸入设备的垃圾回收仓中,达到收集垃圾的效果;设备的位置信息以及摄像头中的图像可传输至后端电脑中,使用者可通过电脑设置设备的行动范围,规划设备的行动路径,以及设备收集垃圾后自动回航的时间以及位置,使设备进行无人化工作。使用者亦可通过电脑中设备的位置,显示的摄像头中的图像进行手动遥控操作。
12.优化的,所述设备主体上设置有照明灯,照明灯能够照射到设备主体前方。
13.照明灯能够为设备提供照明,使其能够在光线较暗的环境中工作,避免其受光线及天气的影响。
14.优化的,所述设备主体的两侧各设置一个支架,支架上设置有浮筒。
15.使用左右两个浮筒的“双体”设计,具有很好的抗风浪性能和灵活机动性能,解决了常规单体清理船因风力偏离巡航轨迹的问题,使设备在工作时更加平稳。
16.优化的,所述驱动装置包括一对推进器,推进器分别安装在两支架上。
17.推进器安装在两侧支架上,能够灵活地控制设备的运动,机动性较好。
18.优化的,所述浮筒前端设置有能够检测障碍物的超声波模块,超声波模块连接至控制单元,所述超声波模块外部设置有前罩。
19.超声波模块能够在设备航行时探测出障碍物,并将信息传输至控制单元,使设备合理避障。
20.优化的,所述设备主体上方设置有太阳能板,太阳能板能够为驱动装置、抽水装置、控制单元供电。
21.优化的,所述设备主体前端开口处铰接设置有前盖板。
22.优化的,所述设备主体前后贯通,垃圾回收仓后端封闭,垃圾回收仓插入设备主体中,所述垃圾回收仓与设备主体之间通过卡扣连接。
23.垃圾收集完成后,拆卸掉卡扣,即可将装有垃圾的垃圾回收仓取下,并将垃圾倒出处理,随后装上即可进行下次收集,装拆方便。
24.优化的,设备主体及垃圾回收仓的开口均为扁长形。
25.扁长形的开口能够尽可能的增加收纳垃圾的宽度,增加工作面范围,收集效率更高,且能够收集更宽的垃圾。
26.本发明的优点在于:
27.1.本发明中的水面垃圾清理无人船在实际应用时,操作者可通过遥控模块对无人
船进行遥控操作,或者,无人船也可通过导航模块进行水面自主导航运行,实际工作时,驱动装置能够驱动整个无人船移动,为其提供动力,当发现水面垃圾时,驱动装置带动无人船移动至垃圾附近,并确保垃圾位于垃圾回收仓开口前方,然后抽水装置开始工作,并将前方的水及垃圾吸入垃圾回收仓内部空间中,水经过垃圾过滤网后排出至设备主体外部,而垃圾则被垃圾过滤网拦住,进而将垃圾收集在垃圾回收仓内部,相对于现有技术,能够方便的实现水面垃圾清理,减轻劳动强度,清理效率较高,成本低,受环境限制较小,另外其整体结构、原理较为简单,结构紧凑,可适用于公园、校园池塘、景观湖泊等水域,能够实现水面上落叶、柳絮等固体垃圾的收集清理等。可以通过手动遥控或自主导航控制,设备上装有导航模块,可以实时的记录设备所在的位置;设备的位置信息可通过设备中的数传电台传输至后端电脑中,使用者可通过电脑设置设备的行动范围,规划设备的行动路径,以及设备收集垃圾后自动回航的时间以及位置,使设备进行无人化工作。使用者亦可通过电脑中设备的位置,进行手动遥控操作,兼具遥控及自主导航,操作较为智能。
28.2.摄像头能够观察水面情况,观察到垃圾后,可控制设备行进至垃圾处并进行收集,摄像头中的图像传输至设备内的控制单元,设备在水面上巡航时可进行垃圾分辨,分辨出垃圾及所在的位置后,将垃圾吸入设备的垃圾回收仓中,达到收集垃圾的效果;设备的位置信息以及摄像头中的图像可传输至后端电脑中,使用者可通过电脑设置设备的行动范围,规划设备的行动路径,以及设备收集垃圾后自动回航的时间以及位置,使设备进行无人化工作。使用者亦可通过电脑中设备的位置,显示的摄像头中的图像进行手动遥控操作。
29.3.照明灯能够为设备提供照明,使其能够在光线较暗的环境中工作,避免其受光线及天气的影响。
30.4.使用左右两个浮筒的“双体”设计,具有很好的抗风浪性能和灵活机动性能,解决了常规单体清理船因风力偏离巡航轨迹的问题,使设备在工作时更加平稳。
31.5.推进器安装在两侧支架上,能够灵活地控制设备的运动,机动性较好。
32.6.超声波模块能够在设备航行时探测出障碍物,并将信息传输至控制单元,使设备合理避障。
33.7.垃圾收集完成后,拆卸掉卡扣,即可将装有垃圾的垃圾回收仓取下,并将垃圾倒出处理,随后装上即可进行下次收集,装拆方便。
34.8.扁长形的开口能够尽可能的增加收纳垃圾的宽度,增加工作面范围,收集效率更高,且能够收集更宽的垃圾。
附图说明
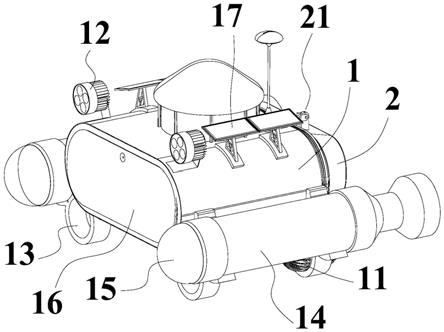
35.图1-4为本发明实施例中水面垃圾清理无人船不同视角的示意图(前盖板关闭);
36.图5为本发明实施例中水面垃圾清理无人船前盖板开启时的示意图;
37.图6为本发明实施例中垃圾回收仓与设备主体分离时的示意图(前盖板关闭);
38.图7-8为本发明实施例中垃圾回收仓与设备主体分离时的示意图(前盖板开启);
39.图9为本发明实施例中连接杆的示意图;
40.图10为本发明实施例中挂耳的示意图;
41.其中,
42.设备主体-1、驱动装置-11、照明灯-12、支架-13、浮筒-14、前罩-15、前盖板-16、太
阳能板-17、圆筒-18、上盖-19;
43.垃圾回收仓-2、卡扣-21、连接杆-211、挂耳-212、横杆-213、卡钩-214;抽水装置-3、垃圾过滤网-31;
44.卫星天线-4。
具体实施方式
45.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
46.如图1、2所示,一种水面垃圾清理无人船,包括设备主体1、垃圾回收仓2、抽水装置3、遥控模块、导航模块、控制单元。
47.如图5所示,设备主体1前端设置开口,如图3所示,所述设备主体1上设置有驱动装置11;如图5所示,设备主体1中设置有垃圾回收仓2,垃圾回收仓2前端设置开口,垃圾回收仓2的开口位于设备主体1的开口中。
48.所述设备主体1能够漂浮在水面,垃圾回收仓2开口的一部分位于水面以下,另一部分位于水面以上,垃圾回收仓2中设置有抽水装置3,如图8所示,抽水装置3与垃圾回收仓2内部空间之间设置有垃圾过滤网31,本实施例中,所述垃圾过滤网31为圆环形,圆环形垃圾过滤网31上开设若干个过滤孔,抽水装置3能够将垃圾回收仓2开口处的水抽至垃圾回收仓2内部空间中,并排出至设备主体1外部。
49.所述设备主体1上还设置有遥控模块和导航模块;还包括控制单元,所述驱动装置11、抽水装置3均由控制单元控制,所述遥控模块和导航模块均连接至控制单元。
50.如图8所示,所述设备主体1前后贯通,设备主体1及垃圾回收仓2的开口均为扁长形。具体的,如图6所示,所述设备主体1、垃圾回收仓2的截面形状均为腰型孔形状。
51.如图4所示,垃圾回收仓2后端封闭,进一步的,所述垃圾回收仓2的后端收口之后封闭,所述抽水装置3包括设置在垃圾回收仓2后端下方的抽水叶片以及抽水电机,抽水电机带动抽水叶片旋转,能够将垃圾回收仓2中的水抽出。
52.如图2所示,垃圾回收仓2插入设备主体1中,具体是从设备主体1的后方向前插入,垃圾回收仓2的后端及抽水装置3从设备主体1后端伸出,所述垃圾回收仓2与设备主体1之间通过卡扣21连接。
53.如图2所示,卡扣21设置在设备主体1上方与垃圾回收仓2后端上方之间,卡扣21可采用现有技术中的卡扣,本实施例中,卡扣21的具体结构为,如图2、9、10所示,卡扣21包括铰接在垃圾回收仓2后端上方的连接杆211,铰接轴沿水平方向,所述设备主体1后端上方设置有挂耳212,挂耳212上设置横杆213,连接杆211的端部设置卡钩214,卡钩214能够卡在挂耳212的横杆213上,进而实现将垃圾回收仓2连接在设备主体1上。
54.如图7所示,所述设备主体1前端开口处铰接设置有前盖板16。铰接位置位于设备主体1前端下方,铰接轴沿左右方向,前盖板16关闭时,前盖板16与设备主体1之间卡接。
55.如图3所示,所述设备主体1顶部设置有竖直的圆筒18,圆筒18顶部通过螺纹连接有上盖19,上盖19为弧形的顶盖。所述圆筒18中装有设备的电路、电池、遥控模块、导航模
块、控制单元等,本实施例中,所述遥控模块采用现有技术,如采用现有技术中的apm飞控系统进行智能控制,导航模块采用现有技术,如现有技术中的bdm卫星导航系统,即北斗卫星导航系统,或者采用gps导航系统,即全球定位系统,或者采用现有技术中的其他导航系统,如图2所示,所述设备主体1顶部设置有卫星天线4。控制单元为现有技术,其主要作用是接受遥控控制,以及根据导航系统的指引,控制设备零部件的工作,可采用现有技术中的plc等进行控制。
56.所述设备主体1上设置有摄像头。摄像头设置在圆筒18或者上盖19上,且镜头朝前。
57.如图1所示,所述设备主体1上设置有照明灯12,照明灯12能够照射到设备主体1前方。照明灯12设置两个,分别位于设备主体1前端顶部两侧。
58.如图3、4所示,所述设备主体1的两侧各设置一个支架13,支架13上设置有浮筒14。所述驱动装置11包括一对推进器,推进器分别安装在两支架13上。
59.支架13的主要作用是将浮筒14以及推进器与设备主体1连接在一起,其不限于特定形状,本实施例中,如图3、4所示,所述支架13包括两个圆弧部、一个圆环,两个圆弧部分别与设备主体1侧下方以及浮筒14贴合,并通过焊接或者螺栓螺母安装在一起,所述推进器安装在支架13的圆环中,所述推进器可采用现有技术中的常规推进器,如螺旋桨等,本实施例中的推进器包括推进叶片以及推进电机,推进电机带动推进叶片旋转实现驱动。
60.所述浮筒14前端设置有能够检测障碍物的超声波模块,超声波模块连接至控制单元,所述超声波模块外部设置有前罩15。超声波模块为现有技术,超声波模块能够将检测的信息传送至控制单元。
61.如图2所示,所述设备主体1上方设置有太阳能板17,太阳能板17能够为驱动装置11、抽水装置3、控制单元供电。进一步的,所述设备主体1顶部两侧各设置两个太阳能板支架,所述太阳能板17架设在太阳能板支架上,太阳能板17能够将产生的电能储存在圆筒18中的电池中。
62.设备上装有太阳能板17,即太阳能充电板,可在工作时补充能源,同时设备的电池为可拆卸模块,便于更换,设备上盖19位置安装有无线充电模块,当设备返回岸边时,可通过配套的充电基站(船坞)进行无线充电。一个区域可投放多台设备进行协同使用,设备间相互联系,达到很好的效果。
63.工作原理:
64.如图1所示,本发明中的水面垃圾清理无人船在实际应用时,操作者可通过遥控模块对无人船进行遥控操作,或者,无人船也可通过导航模块进行水面自主导航运行,实际工作时,驱动装置11能够驱动整个无人船移动,为其提供动力,当发现水面垃圾时,驱动装置11带动无人船移动至垃圾附近,并确保垃圾位于垃圾回收仓2开口前方,然后抽水装置3开始工作,并将前方的水及垃圾吸入垃圾回收仓2内部空间中,水经过垃圾过滤网31后排出至设备主体1外部,而垃圾则被垃圾过滤网31拦住,进而将垃圾收集在垃圾回收仓2内部,相对于现有技术,能够方便的实现水面垃圾清理,减轻劳动强度,清理效率较高,成本低,受环境限制较小,另外其整体结构、原理较为简单,结构紧凑,可适用于公园、校园池塘、景观湖泊等水域,能够实现水面上落叶、柳絮等固体垃圾的收集清理等。可以通过手动遥控或自主导航控制,设备上装有导航模块,可以实时的记录设备所在的位置;设备的位置信息可通过设
备中的数传电台传输至后端电脑中,使用者可通过电脑设置设备的行动范围,规划设备的行动路径,以及设备收集垃圾后自动回航的时间以及位置,使设备进行无人化工作。使用者亦可通过电脑中设备的位置,进行手动遥控操作,兼具遥控及自主导航,操作较为智能。
65.摄像头能够观察水面情况,观察到垃圾后,可控制设备行进至垃圾处并进行收集,摄像头中的图像传输至设备内的控制单元,设备在水面上巡航时可进行垃圾分辨,分辨出垃圾及所在的位置后,将垃圾吸入设备的垃圾回收仓2中,达到收集垃圾的效果;设备的位置信息以及摄像头中的图像可传输至后端电脑中,使用者可通过电脑设置设备的行动范围,规划设备的行动路径,以及设备收集垃圾后自动回航的时间以及位置,使设备进行无人化工作。使用者亦可通过电脑中设备的位置,显示的摄像头中的图像进行手动遥控操作。
66.照明灯12能够为设备提供照明,使其能够在光线较暗的环境中工作,避免其受光线及天气的影响。
67.使用左右两个浮筒14的“双体”设计,具有很好的抗风浪性能和灵活机动性能,解决了常规单体清理船因风力偏离巡航轨迹的问题,使设备在工作时更加平稳。
68.推进器安装在两侧支架13上,能够灵活地控制设备的运动,机动性较好。
69.超声波模块能够在设备航行时探测出障碍物,并将信息传输至控制单元,使设备合理避障。
70.垃圾收集完成后,拆卸掉卡扣21,即可将装有垃圾的垃圾回收仓2取下,并将垃圾倒出处理,随后装上即可进行下次收集,装拆方便。
71.扁长形的开口能够尽可能的增加收纳垃圾的宽度,增加工作面范围,收集效率更高,且能够收集更宽的垃圾。
72.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1