一种可进行海底探测的仿生鱼的制作方法
1.本实用新型具体是一种可进行海底探测的仿生鱼,涉及海底探测的仿生鱼相关领域。
背景技术:
2.仿生鱼是以用于探测水中的污染物,并绘制河水的3d污染图,这种机器鱼形似鲤鱼,身上装备有探测传感器,可以发现水中的多种污染物,仿生鱼作为鱼类推进机理和机器人技术的结合点,为研制新型的水下航行器提供了一种新思路,具有重要的研究价值和应用前景,在仿生鱼使用过程中需要用到可进行海底探测的仿生鱼。
3.但是可进行海底探测的仿生鱼一般都是通过外部控制开关启动第一电机,启动电机通过活动件和活动杆杆带动尾鳍骨架进行摆动,通过控制开关启动驱动器,驱动器带动第一仿鱼鳍和第二仿鱼鳍活动,使仿鱼身在海底进行探测,但是传统可进行海底探测的仿生鱼对于探测器支撑效果较差,在使用过程中受海底压强影响探测器容易在仿生鱼头脱落,导致探测效率降低,同时传统可进行海底探测的仿生鱼对于推杆驱动效果较差,导致使用不方便。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种可进行海底探测的仿生鱼。
5.本实用新型是这样实现的,构造一种可进行海底探测的仿生鱼,该装置包括仿鱼身,所述仿鱼身右端设置有仿鱼头,所述仿鱼头内部左下端设置有辅助支撑装置,所述辅助支撑装置包括壳体、第二电机、支撑杆、承载板、第一滑槽、转盘、驱动机构和滑轮,所述壳体背面中部安装有第二电机,所述支撑杆贯穿于壳体顶端中部,所述承载板与支撑杆顶部固定连接,所述壳体内部上下水平相对固定有第一滑槽,所述转盘与壳体内中部转动连接,所述壳体内中部设置有驱动机构,所述转盘前端面等距安装有滑轮,所述壳体与仿鱼头内部左下端固定连接。
6.优选的,所述仿鱼头右端嵌入有探测头,所述仿鱼身前端面右端设置有第一仿鱼鳍,所述仿鱼身顶部右端设置有仿鱼背鳍,所述仿鱼身背面右端设置有第二仿鱼鳍,所述仿鱼身左端设置有仿鱼尾,所述仿鱼头内部安装有探测机,所述仿鱼身内部左下端安装有第一电机,所述第一电机顶部设置有活动板,并且活动板与第一电机输出端转动连接,所述活动板左端固定有活动杆,所述活动杆左端设置有尾鳍骨架,所述仿鱼身内部下端安装有蓄电池,所述仿鱼身内部右下端设置有固定架,所述固定架顶部安装有驱动器,并且驱动器与第一仿鱼鳍背面铰接。
7.优选的,所述驱动机构包括活动件、滑块、第二滑槽和固定板,所述活动件前端面左端固定有滑块,所述滑块与第二滑槽内侧面滑动连接,所述第二滑槽嵌入于固定板中部,所述固定板与支撑杆中部固定连接,所述活动件与第二电机输出端转动连接。
8.优选的,所述第一滑槽内侧面呈光滑平面,并且支撑杆与第一滑槽内侧面滑动连
接。
9.优选的,所述转盘与第二电机输出端转动连接,并且第二电机带动转盘转动角度为360
°
。
10.优选的,所述滑轮共设置有四个,并且滑轮直径设置为3厘米。
11.优选的,所述固定板呈长方体状,并且固定板外表面粘接有一层防水防氧化层。
12.优选的,所述第二滑槽长度设置为10厘米,并且滑块在第二滑槽内侧面滑动距离范围为0
‑
10厘米。
13.优选的,所述支撑杆为钨钢材质。
14.优选的,所述尾鳍骨架为不锈钢材质。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种可进行海底探测的仿生鱼,与同类型设备相比,具有如下改进:
16.优点1:本实用新型所述一种可进行海底探测的仿生鱼,通过在仿鱼头内部左下端设置了辅助支撑装置,通过外部控制开关启动第二电机,第二电机通过输出端带动转盘转动,转盘带动驱动机构活动,驱动机构带动支撑杆活动,使支撑杆在第一滑槽内侧面进行滑动,支撑杆带动承载板进行活动,使承载板对探测器进行支撑,达到辅助支撑探测器的效果。
17.优点2:本实用新型所述一种可进行海底探测的仿生鱼,通过在壳体内中部设置了驱动机构,通过转盘带动活动件进行摆动,活动件带动滑块活动,使滑块在第二滑槽内侧面进行滑动,滑块通过第二滑槽带动固定板活动,固定板带动支撑杆活动,达到驱动支撑杆活动的效果。
附图说明
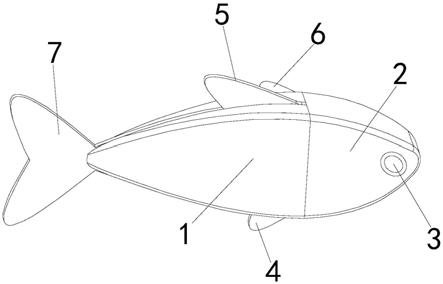
18.图1是本实用新型结构示意图;
19.图2是本实用新型正面剖视结构示意图;
20.图3是本实用新型辅助支撑装置结构示意图;
21.图4是本实用新型辅助支撑装置正面剖视结构示意图;
22.图5是本实用新型驱动机构正面剖视结构示意图。
23.其中:仿鱼身
‑
1、仿鱼头
‑
2、探测头
‑
3、第一仿鱼鳍
‑
4、仿鱼背鳍
‑
5、第二仿鱼鳍
‑
6、仿鱼尾
‑
7、探测机
‑
8、辅助支撑装置
‑
9、第一电机
‑
10、活动板
‑
11、活动杆
‑
12、尾鳍骨架
‑
13、蓄电池
‑
14、固定架
‑
15、驱动器
‑
16、壳体
‑
91、第二电机
‑
92、支撑杆
‑
93、承载板
‑
94、第一滑槽
‑
95、转盘
‑
96、驱动机构
‑
97、滑轮
‑
98、活动件
‑
971、滑块
‑
972、第二滑槽973、固定板
‑
974。
具体实施方式
24.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1和图2,本实用新型通过改进在此提供一种可进行海底探测的仿生鱼,包括仿鱼身1,仿鱼身1右端设置有仿鱼头2,仿鱼头2内部左下端设置有辅助支撑装置9,仿
鱼头2右端嵌入有探测头3,仿鱼身1前端面右端设置有第一仿鱼鳍4,仿鱼身1顶部右端设置有仿鱼背鳍5,仿鱼身1背面右端设置有第二仿鱼鳍6,仿鱼身1左端设置有仿鱼尾7,仿鱼头2内部安装有探测机8,仿鱼身1内部左下端安装有第一电机10,第一电机10顶部设置有活动板11,并且活动板11与第一电机10输出端转动连接,活动板11左端固定有活动杆12,活动杆12左端设置有尾鳍骨架13,尾鳍骨架13为不锈钢材质,具有更长的使用寿命的优点,仿鱼身1内部下端安装有蓄电池14,仿鱼身1内部右下端设置有固定架15,固定架15顶部安装有驱动器16,并且驱动器16与第一仿鱼鳍4背面铰接。
26.请参阅图3和图4,本实用新型通过改进在此提供一种可进行海底探测的仿生鱼,辅助支撑装置9包括壳体91、第二电机92、支撑杆93、承载板94、第一滑槽95、转盘96、驱动机构97和滑轮98,壳体91背面中部安装有第二电机92,有利于更好的对第二电机92进行固定安装,支撑杆93贯穿于壳体91顶端中部,有利于更好的对支撑杆93进行固定安装,承载板94与支撑杆93顶部固定连接,有利于更好的对承载板94进行固定安装,壳体91内部上下水平相对固定有第一滑槽95,第一滑槽95内侧面呈光滑平面,并且支撑杆93与第一滑槽95内侧面滑动连接,以便于支撑杆93更好的在第一滑槽95内侧面进行滑动,转盘96与壳体91内中部转动连接,转盘96与第二电机92输出端转动连接,并且第二电机92带动转盘96转动角度为360
°
,以便于第二电机92更好的带动转盘96进行转动,壳体91内中部设置有驱动机构97,转盘96前端面等距安装有滑轮98,滑轮98共设置有四个,并且滑轮98直径设置为3厘米,以便于达到更好的辅助支撑的效果,壳体91与仿鱼头2内部左下端固定连接。
27.请参阅图5,本实用新型通过改进在此提供一种可进行海底探测的仿生鱼,驱动机构97包括活动件971、滑块972、第二滑槽973和固定板974,活动件971前端面左端固定有滑块972,有利于更好的对滑块972进行固定安装,滑块972与第二滑槽973内侧面滑动连接,第二滑槽973嵌入于固定板974中部,有利于更好的对第二滑槽973进行固定安装,第二滑槽973长度设置为10厘米,并且滑块972在第二滑槽973内侧面滑动距离范围为0
‑
10厘米,以便于滑块972更好的在第二滑槽973内侧面进行滑动,固定板974与支撑杆93中部固定连接,支撑杆93为钨钢材质,具有更强的硬度和耐磨性的优点,固定板974呈长方体状,并且固定板974外表面粘接有一层防水防氧化层,防止经长时间使用导致固定板974外表面生锈或被氧化腐蚀,活动件971与第二电机92输出端转动连接。
28.本实用新型通过改进提供一种可进行海底探测的仿生鱼,按照如下方式运行;
29.第一,首先将本装置移动至需要使用的地方,接着将仿鱼身1放置在海中,通过外部控制开关启动第一电机10,第一电机10通过输出端电动活动板11活动,活动板11带动活动杆12进行活动,活动杆12带动尾鳍骨架13进行摆动,尾鳍骨架13带动仿鱼尾7进行摆动;
30.第二,接着通过外部控制开关启动驱动器16,驱动器16带动第一仿鱼鳍4和第二仿鱼鳍6进行摆动,使仿鱼身1在海底进行活动,通过外部控制开关启动探测机8,使探测机8通过探测头3对海底进行探测;
31.第三,当需要对探测器8进行支撑时,通过外部控制开关启动第二电机92,第二电机92通过输出端带动转盘96转动,转盘96带动活动件971进行摆动,活动件971带动滑块972活动,使滑块972在第二滑槽973内侧面进行滑动,滑块972通过第二滑槽973带动固定板974活动;
32.第四,固定板974带动支撑杆93活动,使支撑杆93在第一滑槽95内侧面进行滑动,
支撑杆93带动承载板94进行活动,使承载板94对探测器8进行支撑,达到辅助支撑探测器8的效果;
33.第五,当本装置使用完毕后,通过外部控制开关控制仿鱼尾7、第一仿鱼鳍4和第二仿鱼鳍6摆动,使仿鱼身1和仿鱼头2露出水面,接着通过外部控制开关关闭第一电机10、探测机8和第二电机92,最后将本装置从海中取出即可。
34.本实用新型通过改进提供一种可进行海底探测的仿生鱼,通过在仿鱼头2内部左下端设置了辅助支撑装置9,通过外部控制开关启动第二电机92,第二电机92通过输出端带动转盘96转动,转盘96带动驱动机构97活动,驱动机构97带动支撑杆93活动,使支撑杆93在第一滑槽95内侧面进行滑动,支撑杆93带动承载板94进行活动,使承载板94对探测器8进行支撑,达到辅助支撑探测器8的效果,通过在壳体91内中部设置了驱动机构97,通过转盘96带动活动件971进行摆动,活动件971带动滑块972活动,使滑块972在第二滑槽973内侧面进行滑动,滑块972通过第二滑槽973带动固定板974活动,固定板974带动支撑杆93活动,达到驱动支撑杆3活动的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1