一种水利大坝水下检测的机器人的制作方法
1.本实用新型涉及检测机器人技术领域,尤其涉及一种水利大坝水下检测机器人。
背景技术:
2.目前,我国是世界上水库大坝拥有最多的国家,且土石坝占多数,由于时间的推移,许多不利因素例如水流的冲刷、气候的变化、风化等导致水下构筑物出现了裂缝、破损等隐患。如此隐患不仅仅会为坝体带来不可控因素也同样会对水库大坝的生活圈、生产圈带来非常可怕的不可控因素。
3.裂缝、破损后混凝土的瓦解会逐渐进入坝内,递增型破坏直至坝体全部溃烂导致坍塌。目前我国水下检测主要靠人携带检测装置进行水下大面积作业,水下区域特别是深水区水压大,对人而言,具有很大的健康隐患;且环境很多未知性,具有较大的安全隐患。
技术实现要素:
4.本实用新型是基于目前水利大坝水下及深水下的检测存在不优、人力下水进行坝体的检测耗费时间与精力的同时还存在着效率低、精度低,并且深水环境下的健康隐患等不利因素下而提供的一种基于水库大坝水下及深水下的检测机器人,可以解决水下检测精度低与人工检测的众多问题,从而更优的提高水利大坝的安全性。
5.为了实现上述技术问题,本实用新型采用的技术方案是:一种水利大坝水下检测的机器人,包括机体,所述机体内设置有压载水舱与控制器,且机体外部连接推进器与尾翼,机体的下方装有平衡固定防护杆,所述推进器包括180度自由切换推进器、水平推进器以及水平大功率推动器,所述180度自由切换推进器、水平推进器布置在机体两侧,所述水平大功率推动器布置在机体尾部与尾翼相连接;所述压载水舱的左部顶端设有通气口,所述通气口连接有通气管道,且通气管道上设置有通气阀门,压载水舱的右部顶端设置有输水口,所述输水口连接有输水管道,且输水管道上设置有水泵与水阀门。
6.进一步的,所述机体上部前端还设置有水下相机。
7.进一步的,所述机体两端的前端还设置有led灯。
8.进一步的,所述机体的前端中部下方还设置有数字成像声呐。
9.进一步的,所述机体的后方下部还设置有尾翼。
10.进一步的,所述机体的上部后端还设置有有线缆口。
11.本实用新型提供的一种基于水库大坝水下及深水下的检测机器人,可以解决水下检测精度低与人工检测的众多问题,从而更优的提高水利大坝的安全性。
附图说明
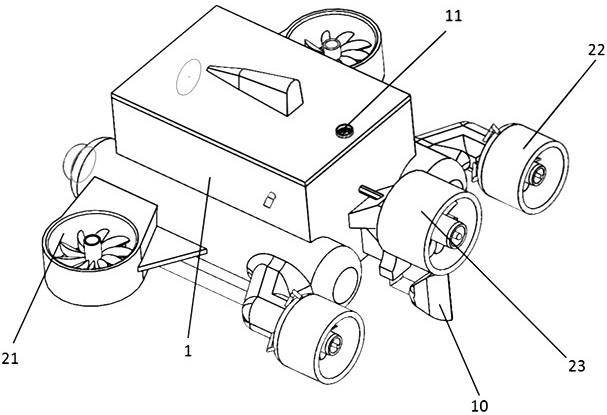
12.图1为本实用新型的整体结构示意图;
13.图2为本实用新型的前部结构示意图;
14.图3为本实用新型的后部结构示意图;
15.图4为本实用新型的底部结构示意图;
16.图5为本实用新型的压载水箱结构示意图;
17.图6为本实用新型的压载水箱内部放大图;
18.附图标记:机体1、180度自由切换推进器21、水平推进器22、水平大功率推动器23、平衡固定防护杆3、竖直距离传感器51、水平距离传感器52、压力传感器53、压载水舱6、通气管道61、通气阀门62、输水管道63、水泵64、水阀门65、水下相机7、led灯8、数字成像声纳9、尾翼10、有缆接口11。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护范围。
20.请参阅图1
‑
图6,本实用新型提供一种水利大坝水下检测的机器人,包括机体1,所述机体内设置有压载水舱6与控制器,且机体外部连接推进器与尾翼10,机体的下方装有平衡固定防护杆3,所述推进器包括180度自由切换推进器21、水平推进器22以及水平大功率推动器23,所述180度自由切换推进器、水平推进器布置在机体两侧,所述水平大功率推动器布置在机体尾部与尾翼相连接;所述压载水舱6的左部顶端设有通气口,所述通气口连接有通气管道64,且通气管道上设置有通气阀门62,压载水舱的右部顶端设置有输水口,所述输水口连接有输水管道63,且输水管道63上设置有水泵64与水阀门65。
21.所述机体上部前端还设置有水下相机7。
22.所述机体两端的前端还设置有led灯8。
23.所述机体的前端中部下方还设置有数字成像声呐9。
24.所述机体的后方下部还设置有尾翼10。
25.所述机体的上部后端还设置有有线缆口11。
26.其中需要说明的是:所述机体1,其材质为防水材质,水下检测机器人机体内部装有压载水舱与控制器,且机体外部连接推进器与尾翼,机体的下方装有平衡固定防护杆,方便放置与减少机体底部磨损,同样有利于机体整个在水底的探查。
27.所述推进器,水下检测机器人一共搭载五枚推进器,其中两枚分别为对称于水下检测机器人机体两侧的可控制180度自由切换推进器21,连接在对称于水下检测机器人机体两端的水平柱体上,通过180度的切换可以控制在水下自由的移动和更加为之精准的定位。后方搭载两枚对称于机体的水平推进器22,且机体后端中部也搭载了一枚相对于两边更为强力的水平大功率推动器23,与左右两端的2枚推进器合作,更加效率的让水下检测机器人在水流中移动。处于机体后端推进器可以控制水下检测机器人的前进或后退,处于机体两侧的可控制180度自由切换推进器可以控制水下巡检机器人在水下的自由运转,通过前中端的可控制180度自由切换推进器与水下巡检机器人后端的水平强力推进器的合作作用,可以控制水下检测机器人沿坝面且基于裂缝位置倾斜移动。
28.所述平衡固定防护杆3,水下检测机器人机体底部安装平衡固定防护杆,其作用方便放置与减少机体底部磨损,同样有利于机体在水底的探查。
29.所述控制器,采用目前市面上的软件对水下检测机器人进行全面控制,搭载的控制器连接定位模块,数字成像声呐,水下相机,压力传感器,竖直距离传感器,水平距离传感器,通过线缆传输到操作端,生成多项检测图,已达到更方便查看与记录。
30.所述传感器,水下检测机器人机体内部前端搭载一枚竖直距离传感器51,机体内部后方搭载一枚水平距离传感器52,机体下方中部搭载一枚压力传感器53,进行高精度水深检测,竖直距离传感器可以检测水下检测机器人与水库大坝底部的距离,水平距离传感器可以检测水下检测机器人与水利大坝坝面的距离,压力传感器可以检测水下检测机器人可以有效地控制水下检测机器人在水下的深度,使水下检测机器人在水下的深度得以更加精确的调节,以及内部搭载的温度仪可以使水下检测机器人检测到水下的温度。
31.所述压载水舱6,压载水舱在水下检测机器人机体内部,压载水舱左部顶端打有通气口,连接通气管道61,且通气管道上设置有通气阀门62,压载水舱右部顶端设置有输水口,连接输水管道63,且输水管道上设置有水泵64与水阀门65。当水下检测机器人需要下潜时,首先打开水泵,其次打开水阀门,水通过连接压载水舱的输水管道流入压载水舱,同时压载水舱内的空气,进行空气压缩,通过连接压载水舱的通气管道排出压载水舱内的空气,通过改变密度,将水下检测机器人的总重力变大,以更好的使水下检测机器人下潜。当水下检测机器人需要上浮时,首先打开水泵,其次打开水阀门,进行空气压缩,通过连接水箱的输水管道,将水箱内的水流出,排出水箱内的水,通过改变密度,将水下检测机器人的总重力变小,以更好的使水下检测机器人上浮。
32.所述水下相机7,水下相机搭载于水下检测机器人机体上部前端,搭载的摄像头采用高分辨率成像,并且有简洁的用户操作页面方便于用户操作,且内部同样搭载可调式亮度led灯,更优的提供在水下以及深水下光线不足,浑浊的情况下更清晰的观测与探查且记录坝面的状况。并其内设更为大容量的内部储存,更优的储存坝面裂缝截图以及选取视频的下载。
33.所述led灯8,led灯搭载于水下检测机器人对称与机体两端的安装固定水平柱体前端,主要用于在水下,光照条件不足、水质浑浊的情况下提供高强度照明,与水下相机内部搭载的led相结合,更优的便于搭载的相机更清晰的对坝面进行记录与扫描。
34.所述数字成像声呐9,声呐搭载于水下检测机器人机体的前端中部水下相机下方,其频率可以达到1mhz,其最大的工作深度达到1000米,其中换能器具有流体补偿功能,采用rs232接口,其码率可达到230.4kbps,且配合水下相机6可以实现检测大坝坝面裂缝尺寸及深度。
35.所述尾翼10,尾翼搭载于水下检测机器人机体后方下部,尾翼可以控制水下检测机器人在水下左右的移动,通过与推进器的合作关系,可以达到在水中灵活的移动和调整位置。
36.所述有线缆口11,有线缆口搭载于水下检测机器人集体上部后方中部,用于机器人与控制器之间的信息传送和充电,可拆卸。
37.所述无线传输,无线传输主要用于水下检测机器人将在水下检测的各项数据通过无线传输,传输至控制器中。
38.所述控制器 4,主要用于对机器人运动控制、运动画面监控、数据信息采集显示,主要用于操控水下检测机器人工作及大坝坝面裂缝位置、裂缝尺寸、裂缝深度、水位上升与
下降、水压水温等信息监测。
39.水下检测机器人主要采用遥控巡检方式,通过控制器4与有缆接口11连接来操控水下检测机器人在水下检测,也可通过无线传输功能控制机器人运动。下潜的时候,首先打开水泵64,其次打开水阀门65,水通过连接压载水舱6的输水管道流入压载水舱6,同时压载水舱6内的空气,进行空气压缩,通过连接压载水舱6的通气管道排出压载水舱内的空气,同时配合机体1上搭载两枚分别为对称于水下检测机器人机体两侧的可控制180度自由切换推进器21,后方两枚对称于机体1的水平推进器22,机体1后端中部的水平大功率推动器23。通过可控制180度自由切换推进器21、水下巡检机器人后端的水平推进器22、水平大功率推动器23、压载水箱6的合作作用,控制水下检测机器人在水中自由移动,精准沿坝面且基于裂缝位置倾斜移动。其控制器通过水下相机7、数字成像声纳9将水下检测机器人定位在水下倾斜坝面上,并通过竖直距离传感器51、水平距离传感器52、压力传感器53调整精准的位置,在180度自由切换推进器21、水平推进器22、水平大功率推动器23的合作作用下使水下检测机器人沿着大坝坝面的侧壁从上往下移动,通过水下相机7、数字成像声纳9对坝面进行扫描且检测。通过竖直距离传感器51、水平距离传感器52分析水位与水下检测机器人与大坝坝面的各项距离指数,通过压力传感器53分析水下温度与水压。
40.在水下检测机器人检测的同时,裂缝检测数据、水位上升下降数据、水压水温数据通过无线传输或有缆传输11 将以上数据传送到控制器视频画面显示中并且将其储存在数据库。操作员对水下检测机器人检测到的裂缝位置、裂缝尺寸,裂缝深度等反馈数据进行记录和报备,并根据检测到的相关数据对裂缝位置进行补救措施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1