一种水下机器人
1.本发明涉及机器人领域,特别涉及一种水下机器人。
背景技术:
2.目前在进行浅水区的水下研究时,可以采用水下机器人进行水样采集、水下图像检测、水质检测等工作。水下机器人一般包括船体和驱动船体移动的驱动器,在船体上搭载用于进行水样采样、图像检测、水质检测等工作的设备,通过推进器使船体移动至所需采样、检测的水域。
3.由于船体不仅需要前进,还要能够调节前进的方向,因此目前市面上出现了采用矢量推进器进行驱动的水下机器人,通过矢量推进器提供前进推力以及使船体俯仰、偏航、横滚和反推的推进力和力矩,以便进行船体的驱动和控制。现有的矢量推进器如申请公布号为cn109515666a的中国专利所公开的一种水下机器人的矢量推进器,其传动原理是将螺旋桨轴安装在一个支架上,通过该支架绕另一支架旋转,而另一支架又绕箱体旋转,且此两个旋转方向正交,从而实现螺旋桨轴全方位摆动,具体的如图1所示,通过安装螺旋桨轴的支架5绕y轴旋转,以及另一支架2绕z轴旋转,并且带动螺旋桨轴一起绕z轴旋转,而螺旋桨轴本身可以沿着安装螺旋桨轴的支架5旋转副旋转,因此螺旋桨轴在空间可以以o点为中心沿y轴和z轴旋转,为了实现传动,其方案设置两条传动链,一是摆转轴系传动链,实现尾部推进器上下摆动,二是滚转轴系传动链,实现尾部推进器整体左右水平滚转,以便调整尾部推进器的姿态,从而使尾部推进器相对水下航行器产生矢量推力。其中摆转轴系传动链通过平面高副传动实现其件1与支架2之间的传动,支架2和支架5之间转动副连接;滚转轴系传动链通过件3与件4之间的锥齿轮副进行传动,件4与支架5固接绕y轴转动。这种结构的摆转轴系传动链和滚转轴系传动链的传动件相互嵌套,结构较为复杂;件4随件5绕y轴转动时必然会导致件3随之转动,解耦性较差,不便于控制;其设计只可以获得在任意回转角度下的
‑
30
°
至 +30
°
范围内的偏转,偏转范围相对较小。
技术实现要素:
4.本发明的目的是针对现有推进器偏转范围相对较小的问题,提供一种水下机器人。
5.本发明的上述技术目的是通过以下技术方案得以实现的:一种水下机器人,包括船体和推进器,所述推进器成对设置且对称设置在船体两侧,每个所述推进器包括基架、输入机构一、输入机构二、中间连接机构、输出机构、螺旋桨装置、驱动器一和驱动器二,基架固定在船体的侧壁上,输入机构一和输入机构二分别转动连接在基架上,输入机构一与基架间的转动轴线a平行于船体的高度方向,输入机构二与基架间的转动轴线b平行于船体的宽度方向,中间连接机构与输入机构二转动连接且二者间的转动轴线c垂直于轴线b,输出机构与中间连接机构转动连接且二者间的转动轴线d垂直于轴线c,输出机构与输入机构二转动连接且二者间的转动轴线e垂直于轴线a,轴线d和轴
线e互相垂直,轴线a、轴线b、轴线c、轴线d、轴线e相交于一点,驱动器一驱动输入机构一绕轴线a转动,驱动器二驱动输入机构二绕轴线b转动,螺旋桨装置固定设置在输出机构上,螺旋桨的旋转轴线垂直于轴线e。
6.较佳的,所述基架包括叉座和u形的叉头,叉座与叉头的底部一体连接二者分设在底部的两侧,叉头包括两相对设置的叉臂,叉座位于两叉臂间,输入机构一至少包括叉头一(221),叉头一呈u型,两叉臂一(2211)相对设置,驱动器一(270)固定设置在其中的一个叉臂(2121)上,驱动器一的输出端穿过对应侧的叉臂上设置的轴孔二固定连接对应侧的叉臂一(2211),驱动器一的输出端与轴孔二转动配合,另一叉臂一与相对应侧的叉臂转动连接,在驱动器一的驱动下叉头一绕轴线a相对于叉臂转动;输入机构二包括轴状的叉座二和u形的叉头二,叉头二的两叉臂二(2321)相对设置,叉座二与叉头二分别位于叉座二的底部二的两侧,叉座二穿过底部二上设置的轴孔一与轴孔一转动配合连接,叉头二与叉头位于同侧,叉座二与驱动器二的输出端固定连接,驱动器二驱动叉头二绕轴线b转动;输出机构包括连接头、输出轴,连接头设置在输出轴的一端,输出轴的另一端穿过底座一上的轴孔三通过螺旋桨连接件与螺旋桨装置连接,输出轴的轴线为e轴线,通过轴孔三与输入机构一转动配合连接,所述的中间连接机构位于两叉臂一间,输入机构二通过其叉臂二与中间连接机构绕轴线c转动连接,连接头与中间连接机构绕轴线d转动连接,基架通过叉座与船体连接,驱动器一和驱动器二分别为舵机。
7.较佳的,所述的中间连接机构呈环形,包括相对设置的两个连接部一和相对设置的两个连接部二,连接部一与连接部二交错设置首尾相连形成一体的环形结构,叉头二的两叉臂二分别转动地连接在两相对设置的连接部一上,连接头转动地连接在两相对设置的连接部二之间。
8.较佳的,连接部二为圆心角大于180
°
的缺口环,叉头二的端部设有缺口的环形轴孔,缺口环的开口背向叉座二,缺口环开口的圆心角小于180
°
,连接部二转动地设置在所述缺口的环形轴孔内,缺口环的开口宽度m和缺口的环形轴孔的开口的宽度n均大于输出轴的直径p。
9.较佳的,螺旋桨装置包括导管、固定在导管内的螺旋桨支架、转动连接在螺旋桨支架上的桨毂、多个均匀固定在桨毂圆周上的叶片以及驱动桨毂转动的螺旋桨驱动器,桨毂与螺旋桨支架之间的转轴轴线与导管的轴线重合,桨毂和叶片均位于导管内,输出机构与导管的外圆周壁固定连接。
10.较佳的,所述船体包括外壳和固定在外壳两侧的浮体,外壳呈流线型结构且内部中空,叉座位于外壳内部,外壳内部固定设置有电源组件、主控制板、水样采集器、姿态传感器和惯性传感器,外壳外侧设置有深度计和水质传感器,电源组件、水样采集器、姿态传感器、惯性传感器、深度计、水质传感器以及各个驱动器的i/o接口与主控制板上对应的i/o接口电连接,外壳的各处开口均设置防水结构,水样采集器的进水口从船体底部伸出。
11.较佳的,外壳的上表面固定设置有太阳能电池板,太阳能电池板的i/o接口与主控制板上对应的i/o接口电连接。
12.较佳的,外壳内部设置有密封舱一和密封舱二,电池组件设置在密封舱一内,主控制板、姿态传感器和惯性传感器设置在密封舱二内,密封舱一和密封舱二上的各处开口均设置防水结构。
13.较佳的,外壳内部的前端设置有摄像头和照明灯,外壳前端设置有透明端盖,船体外壁上设置有无线信号传输器,无线信号传输器与摄像头电连接。
14.较佳的,螺旋桨的旋转轴线垂直于轴线d,所述输入机构一还包括叉座一,叉座一一体设置在叉头一的底部一上,与叉臂一分别设置在底部一的两侧,轴孔二贯穿叉座一,输入机构一以轴线e对称,输入机构二以轴线b对称,基架以轴线b对称。
15.本发明具有以下有益效果:本发明的水下机器人包括船体和对称设置在船体两侧的推进器,每个推进器包括基座、输入机构一、输入机构二、中间连接机构、输出机构和螺旋桨装置,基座固定在船体上,输入机构一与基座间的转动轴线a平行于船体的高度方向,输入机构二与基座间的转动轴线b平行于船体的宽度方向,驱动器一驱动输入机构一转动,驱动器二驱动输入机构二转动,中间连接机构与输入机构二转动连接且二者间的转动轴线c垂直于转动轴线b,输出机构包括连接头和输出轴,连接头转动连接在中间连接机构上且二者间的转动轴线d垂直于轴线c,输出轴与输入机构二转动连接且二者间的转动轴线e垂直于轴线a,连接头与输出轴之间固定连接且轴线d和轴线e互相垂直,螺旋桨装置固定设置在输出机构上,螺旋桨的旋转轴线垂直于轴线e,轴线a、轴线b、轴线c、轴线d、轴线e相交于一点,使基座、输入机构一、输入机构二、中间连接机构、输出机构整体形成一个基于球面两自由度正交并联机构,采用这样结构的推进器,螺旋桨装置的偏转范围可以绕x轴旋转360
°
、绕z轴转动接近180
°
,偏转范围大,能够实现上下、左右、前后方向上的精准定位;基座、输入机构一、输入机构二、中间连接机构、输出机构之间只通过转动副连接,结构相对简单,解耦性好便于进行控制;采用这样的结构可以将驱动器一和驱动器二固定设置在基座上,避免了驱动器增加负载,有助于提高水下机器人能源利用效率和船体搭载效率。
附图说明
16.图1是现有矢量推进器的传动原理图;图2是本发明水下机器人的结构示意图;图3是本发明实施例结构中基架、输入机构一、输入机构二、中间连接机构和输出机构之间的连接结构示意图;图4是本发明实施例结构另一视角的基架、输入机构一、输入机构二、中间连接机构和输出机构连接结构示意图;图5是发明另一实施例结构的推进器的示意图,其中省略了螺旋桨装置;图6是发明另一实施例中缺口环连接部一开口宽度、缺口的环形轴孔开口宽度n与输出轴直径p的关系示意图;图7是螺旋桨装置的结构示意图;图8是船体内部结构的示意图。
17.附图标记说明,100、船体;110、外壳;111、前端盖;112、后端盖;130、密封舱一;140、密封舱二;200、推进器;210、基架;211、基架座;212、基架头;2121、基架臂;213、驱动器基座;220、输入机构一;221、叉头一;2211、叉臂一;222、叉座一;
230、输入机构二;231、叉座二;232、叉头二;2321、叉臂二;2322、缺口环;240、中间连接机构;241、连接部一;2411、缺口的环形孔;242、连接部二;250、输出机构;251、连接头;252、输出轴;253、螺旋桨连接件;260、螺旋桨装置;261、导管;262、螺旋桨支架;263、桨毂;264、叶片;265、驱动器壳;270、驱动器一;280、驱动器二;300、摄像头;301、照明灯;400、太阳能电池板;500、水样采集器;600、无线信号传输器。
具体实施方式
18.以下结合附图对本发明作进一步详细说明。其中相同的零部件用相同的附图标记表示。为了便于说明,下面将u形结构两个互相平行的自由端称之为u形结构的臂,将两个臂之间的结构称之为u形结构的底部。
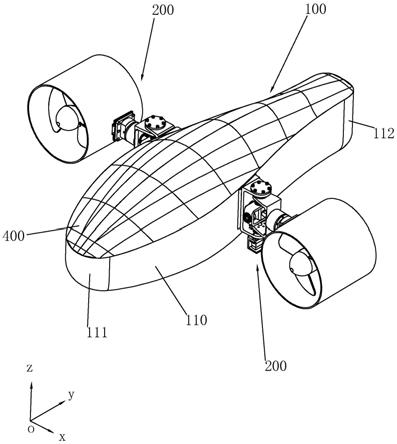
19.一种水下机器人,如图2所示,包括船体100和推进器200。如图2所示,推进器200设置有两个,且对称设置在船体100的两侧,这有助于提高船体100的稳定性。当然,也可以成对地设置4个或6个或更多对推进器,视具体需要而定,为保持稳定,成对设置的推进器对称设置在船体的两侧。为便于说明,以图2所示的位置为原点位置。在图2所示的位置上,船体处于水平状态,船体的长度方向与y轴方向一致,船体的高度方向与z轴方向一致,船体的宽度方向与x轴方向一致。在此o点位置,轴线a沿z轴方向设置、轴线b沿x轴方向设置、轴线c沿y轴方向设置,轴线a、轴线b、轴线c相交于一点o。轴线c垂直于轴线b,轴线d垂直于轴线c,轴线e垂直于轴线d和轴线a。
20.结合图2、图5和图7所示,推进器200包括由基架210、输入机构一220、输入机构二230、中间连接机构240、输出机构250构成的一个基于球面两自由度正交并联机构,驱动并联机构运动的驱动器一270和驱动器二280以及螺旋桨装置260。
21.其中基架210作为并联结构的承载装置,对并联机构、驱动器进行支撑。基架210固定设置在船体100上,相对于船体静止不动。输入机构一220为一刚性件,在驱动器一270的驱动作用下以轴线a为轴相对于基架210摆动,输入机构一通过输出机构250与螺旋桨连接,输出机构为刚性件,沿轴线e方向设置,由于轴线a与船体100的高度方向平行,轴线e与船身的宽度方向一致,因而驱动装置一驱动输入机构一绕轴线a转动或摆动从而带动输出机构和螺旋桨在水平面内摆动,用于调节螺旋桨的前后摆动角度。如图4所示,输入机构二230在驱动器二的驱动作用下沿轴线b与基架210相对转动,输入机构二通过中间连接机构240与输出机构连接,从而与螺旋桨连接,由驱动器二280驱动输入机构二230绕轴线b相对于基架210转动,轴线b与船体100的宽度方向平行,在驱动器二的驱动下,输入机构二绕轴线b转动从而带动输入机构二及输出机构和螺旋桨转动,用于调节螺旋桨的俯仰角度。为了使输入机构一和输入机构二在同时运动时输出机构能实现360度无死角运动,输入机构二230与中
间连接机构240绕轴线c转动连接,输出机构250与中间连接机构240绕轴线d转动连接,轴线d垂直于轴线c并相交于o点。
22.中间连接机构240既与输入机构二230转动连接又与输出机构250转动连接,用于将输入机构二230上的输入传递到输出机构250上,轴线c垂直于轴线b。除中间连接机构240外,输出机构250还与输入机构一220转动连接,输入机构一220和输入机构二230的输入同时作用在输出机构250上,输出机构250与输入机构二230之间的转动轴线为轴线e,轴线e垂直于轴线d,轴线e垂直于轴线a。轴线a、轴线b、轴线c、轴线d、轴线e相交于一点,使基座210、输入机构一220、输入机构二230、中间连接机构240、输出机构250整体形成一个基于球面两自由度正交并联机构。螺旋桨装置260固定设置在输出机构250上,螺旋桨的旋转轴线垂直于轴线e,最好螺旋桨的旋转轴线还垂直于轴线d,有助于简化控制时的运算。采用上述结构的推进器200,通过驱动器一270驱动输入机构一220转动可以使螺旋桨装置260的前后摆动范围达到绕z轴转动接近180
°
,通过驱动器二280驱动输入机构二转动可以使螺旋桨装置俯仰范围达到绕x轴旋转360
°
,螺旋桨偏转范围大,且能够实现上下、左右、前后方向上的精准定位;基架210、输入机构一220、输入机构二230、中间连接机构240、输出机构250之间只通过转动副连接,结构相对简单,解耦性好,便于进行控制。驱动器一270和驱动器二280均固定设置在基架210上,有助于减少驱动器负载,提高水下机器人能源利用效率和船体100搭载效率。
23.优选采用如下结构的基架210、输入机构一220、输入机构二230、中间连接机构240及输出机构250。基架210呈u型叉杆形,包括基架座211和基架头212,基架座211用于支撑输入机构一并与船体固定连接,基架头212呈u型,包括两相对设置的基架臂2121和基架头底部,船体100的侧壁上开设有与基架座211相适配的连接口(图中未示出),基架座211从连接口处伸入船体100内部,基架座211与船体100固定连接。基架座211与基架臂2121分别位于基架头底部的两侧,基架头底部居中设置在两基架臂2121间,在基架头底部在两个基架臂2121中间沿轴线b设有轴孔一。基架座211可以设置为框架状,以便于在其内部安置驱动器二。输入机构一的结构与基架210的结构大体相同,包括叉座一222和叉头一221,叉头一221包括两相对设置的叉臂一和底部一,叉臂一和叉座一222分别位于底部一的两侧,底部一居中设置在两叉臂一间,叉座一222和底部一上设置有轴孔二,轴孔一的轴线为轴线e。叉头一的两叉臂转动地连接在叉头的两叉臂上,驱动器一的输出端沿轴线a设置,其穿过叉头的下叉臂后与叉头一的下叉臂一固定连接,驱动器一的输出端与叉头的下叉臂转动连接。
24.输入机构二230的结构与输入机构一220的结构大体一致,包括叉座二231和叉头二232,叉头二232包括两相对设置的叉臂二和底部二,叉臂二和叉座二分别位于底部二的两侧,叉头二232位于两叉臂二的中间位置,底部二居中位于两叉臂二232间。叉座二231呈轴状穿过轴孔一,叉座二231与基架座211处于同一侧,叉座二231通过轴孔一与基架210转动连接,叉座二231与驱动器二280的输出端同轴固定连接,驱动器二280固定设置在基架座211的框架内部。
25.叉头一221位于基架头212的两臂之间,叉头一221的两臂分别与基架头212的两臂转动连接,叉头一221与基架头212的转动轴线为轴线a;叉座一222上设有用于与输出机构250连接的轴孔二,轴孔二的轴线即为轴线e。叉头二232位于基架头212的两臂之间,用于与中间连接机构240连接。中间连接机构240呈矩形环状,包括两个用于连接输入机构二230的
连接部一241和两个用于连接输出机构250的连接部二242,连接部一241和连接部二242均为矩形板状,两个连接部一241彼此相对设置,两个连接部二242彼此相对设置,两个连接部一241与两个连接部二242交错设置首尾相连形成一体的环形结构,两个连接部一241分别与对应侧的叉头二232的两叉臂二转动连接,连接部一241与叉头二232之间的转动轴线即为轴线c。输出机构250包括连接头251、输出轴252和螺旋桨连接件253,输出轴252穿过叉座一222上的轴孔二与输入机构二230转动连接从而与输入机构一220转动连接。输出轴250通过连接头251与连接部二242转动连接。连接头251位于两个连接部二242之间与两个连接部二242转动连接,连接头251与连接部二242之间的转动轴线为轴线d。输出轴通过螺旋桨连接件253与螺旋桨装置260固定连接。可以在位于下方的基架头212上固定设置驱动器基座213,用于设置驱动器一270,驱动器一270固定设置在驱动器基座213上,驱动器一270的输出端穿过基架头212与叉头一221固定连接。上述结构的基架210、输入机构一220、输入机构二230、中间连接机构240、输出机构250的结构简单,架体与架体之间的连接清晰、明了,便于拆装。基架头212、叉头一221和叉头二232的u形结构,以及中间连接机构240的环形结构均可以增加转动副的支撑位置,有助于提高机构的稳定性。
26.如图5和图6所示,中间连接机构240还可以采用另一种结构,将中间连接结构设置为缺口环结构,连接部一241上设置环形缺口2411,叉头二232的叉臂二上开设有缺口的环形轴孔2322,缺口的环形轴孔的开口背向叉座二231,缺口的环形轴孔与连接部一241的外形相适配,缺口的环形轴孔与连接部一241之间通过半月轴承转动连接,连接部一241缺口环的圆心角大于180
°
,缺口的环形轴孔的圆心角小于180
°
,保证转动时连接部二不会从缺口的环形轴孔的开口掉出,此外由于叉头二232的叉臂二与缺口的环形轴孔的大于180度的面接触,可以增大结构稳定性。如图6所示,缺口环开口的宽度m、缺口的环形轴孔开口的宽度n以及半月轴承圆周上的开口的宽度均大于输出轴252的直径p,这样输出轴252转动时可以进入缺口环内,可以扩大输出机构绕轴线d转动的范围,使螺旋桨装置260绕z轴转动的角度达到甚至超过180
°
,进而扩大螺旋桨的偏转范围,不会在运行过程中产生死角。此外,螺旋桨装置260可绕z轴转动的角度超过180
°
,可以使船体100两侧的螺旋桨装置260彼此正相对或正相背,在此时两个螺旋桨装置260产生的推力可以完全抵消,从而可以使螺旋桨产生的推力快速消失,有助于快速稳定船体100。
27.螺旋桨装置可以采用市面上能采购到的任意一种用于水下设备的螺旋桨装置,本发明优选导管螺旋桨,驱动器一和驱动器二优选舵机。如图7所示,导管螺旋桨包括导管261、螺旋桨支架262、桨毂263、叶片264、驱动器壳265和螺旋桨驱动器(图中未示出)。螺旋桨驱动器固定设置在驱动器壳265内,驱动器壳265位于导管261内,螺旋桨支架262用于支撑驱动器壳265,螺旋桨支架262的一端与导管261的内壁固定连接,另一端与驱动器壳265的外壁固定连接。支撑桨毂263和螺旋桨驱动器,桨毂263转动连接在驱动器壳265上,叶片264设置有多个且均匀的固定在桨毂263圆周上,螺旋桨驱动器驱动桨毂263转动,桨毂263与驱动器壳265之间的转动轴线与导管261的轴线重合且垂直于轴线e,桨毂263和叶片264均位于导管261内,螺旋桨连接件253与导管261的外圆周壁固定连接。导管261可以增加螺旋桨装置的推力,并能有效降低螺旋桨的噪音,同时有利于防止水下生物、渔网等杂物缠绕在叶片264上。
28.如图2所示,船体100最好设置为流线型结构,有助于减小流动阻力,有利于增强机
器人浅水的吃水能力。如图8所示,船体100包括外壳110和浮体,浮体增加船体100的浮力,浮体对称设置在船体的两侧且位于船体的外侧,这样可以形成较大力矩,有助于增加船体的稳定性,减少翻船的可能性。机器人整体浸没在水中时,浮心略高于重心 使船可以定深航行。如图8所示,外壳110内部中空用于安装部分采集和检测所用的设备,外壳110内部固定设置有电源组件(图中未示出)、主控制板(图中未示出)、水样采集器500、姿态传感器(图中未示出)和惯性传感器(图中未示出),其中水样采集器500的进水口从外壳110的底部伸出船体100,以便于采集水样。船体100的外壁上固定设置有深度计和水质传感器(图中未示出),在本实施例中水质传感器包括用于检测水体ph值的ph传感器、用于检测水体浑浊度的浊度传感器以及用于检测水中溶解氧含量的溶解氧传感器。外壳110的各处开口均设置防水结构,信号接收器设置在船体100的底部。为了提高机器人的续航能力可以在外壳110的上表面固定设置太阳能电池板400,通过太阳能补充能源。外壳110内部的前端可以设置摄像头300和照明灯301,用于观察水中的景象,外壳110前端设置透明的前端盖111,使摄像头300的视野和照明灯301的照明范围能够穿透外壳110,外壳110的后端设置有可拆卸固定连接的后端盖112,以便于从后端盖112处对船体100内部的结构进行安装与拆卸。电源组件、水样采集器500、姿态传感器、惯性传感器、水质传感器、深度计、太阳能电池板400、照明灯301、摄像头300和各个驱动器的i/o接口分别与主控制板上的对应i/o接口连接。优选在船体100的外壁上固定设置无线信号传输器600,无线信号传输器600的输入端与摄像头300的图像输出接口电连接,这样便于摄像头300将拍摄到的图像通过无线信号传输器600发射的无线信号实时传输给使用者。优选在外壳110内部设置有密封舱一130和密封舱二140,将电池组件设置在密封舱一130内,将主控制板、姿态传感器和惯性传感器设置在密封舱二140内,外壳110和密封舱构成了双层的密封结构,有助于防水,外壳110、密封舱一130和密封舱二140上的各处开口均设置防水结构,其中需要进行电连接处可以采用水密接插件连接以实现防水。
29.本发明的浅水水下机器人,将作为驱动器的舵机安装到基架上,减小了机构的转动惯量,降低了作动电机的载荷,提升了机构运动的灵活性,进一步优化了机构的运动特性。
30.相比于串联机构中单个作动电机单独控制单个自由度,并联机构推进器结构紧凑,通过两个作动电机同时控制机构的多个自由度,从而提高了机构的刚度、运动精度、机构的运动速度等、减小了相同负载下电机的负荷,同时也避免了使用大型零件,从而减小了机构的体积,提高了水下机器人能源利用效率和搭载能力,能节约能源,增大航程。
31.由于采用正交的并联机构,推进器运动解耦性好,极大地简化控制算法,加快系统的响应速度,降低了控制难度。
[0032] 本发明结构的矢量推进器则可避免低速控制难题,在低速的时候也能够实现很好的运动控制。解决了采用常规的鳍舵式推进器的水下机器人,不采用辅助推进器时航行速度低于2~3 kn,鳍舵不能为水下机器人提供足够的偏转力矩的技术难题。
[0033]
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1