一种水下机器人的控制系统
1.本实用新型属于竞赛机器人技术领域,具体涉及一种水下机器人的控制系统。
背景技术:
2.水下管道智能巡检机器人项目是工程训练大赛的一子项目,比赛规则如下:机器人比赛场地如图4所示,比赛时,机器人能够沿着水下管道运动,检测管道上的吸附物,并发出警报,并完成移除、回收等任务。任务执行过程中不允许使用包括遥控在内的任何人工交互的手段控制水中机器人及辅助装置。
3.目前实验设备中专门针对竞赛的实验设备较少,学生对于竞赛理解不足,同时为了更加高效、高完成度的完成竞赛任务,为此我们设计了一款适用于竞赛和教学用的水下机器人,并提出了与机器人匹配的控制系统。
技术实现要素:
4.本实用新型所要解决的技术问题便是针对上述现有技术的不足,提供一种水下机器人的控制系统,它能够操控水下机器人灵活的浮潜或水平移动,并能实现自动巡线,并在巡线过程中识别、清理垃圾,完成竞赛任务。
5.本实用新型所采用的技术方案是:一种水下机器人的控制系统,包括机体,所述机体为内部中空的密封结构,所述机体内固定安装有主控器、六路电调控制器、舵机控制器、电源模块、温湿度传感器、压力传感器和电子罗盘,所述机体外两侧对称安装有动力推进器,所述机体前端中部安装有抓取机构和视觉识别装置,所述六路电调控制器与动力推进器连接,所述舵机控制器与抓取机构的驱动机构连接,所述主控器分别与六路电调控制器、舵机控制器、电源模块、温湿度传感器、压力传感器、电子罗盘和视觉识别装置连接。
6.作为优选,所述机体由上壳、中壳和下壳密封拼接构成。
7.作为优选,所述动力推进器包括两个垂直推进器和一个水平推进器,所述水平推进器通过水平安装架固定在机体一侧中部,两个垂直推进器通过垂直安装架对称安装在水平推进器的前后两侧,所述六路电调控制器分别与每个水平推进器和垂直推进器连接。
8.作为优选,所述视觉识别装置包括openmv摄像头、补光灯和异物报警灯,openmv摄像头、补光灯和异物报警灯分别与主控器连接。
9.作为优选,所述抓取机构包括固定架和竖直设置的三组卡爪,三组卡爪分别位于固定架的顶部、中部和底部,三组卡爪通过连接杆在竖直方向上固定对齐,位于固定架顶部和底部的两组卡爪的端部设有相互啮合的齿轮,两组齿轮分别固定连接在固定架的顶部和底部,所述固定架上固定安装有驱动舵机,驱动舵机的输出轴与其中一个齿轮连接,所述驱动舵机与舵机控制器连接。
10.本实用新型的有益效果在于:
11.(1)通过六路电调控制器分别控制每一个水平推进器和垂直推进器,能使机体在水中自由浮潜或水平移动,移动灵活度高;
12.(2)设置的压力传感器和罗盘,用于检测机体在水中的水压和机体姿态,便于实时了解机体的状态;
13.(3)设置视觉识别装置,用于识别水下管道及管道表面的异物,保证机体能随管道行进;
14.(4)设置抓取机构,便于对水下管道表面待清理的异物进行清理。
15.本实用新型可使机体在水中灵活的浮潜或平移,并能根据水下管道进行自动巡线,并在巡线过程中对对水下管道表面的异物进行清理,能有效提高竞赛任务完成度及完成效率。
附图说明
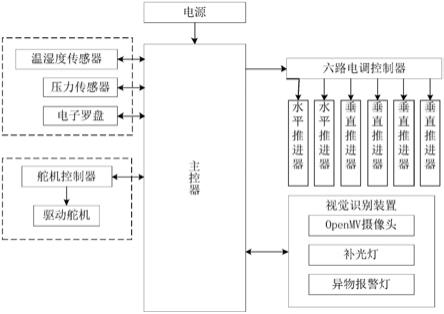
16.图1为本实用新型的系统框图;
17.图2为本实用新型的结构示意图;
18.图3为本实用新型抓取机构示意图;
19.图4为竞赛地图的俯视图。
20.图中:1、机体;2、动力推进器;3、抓取机构;4、视觉识别装置;21、水平推进器;22、垂直推进器;31、固定架;32、卡爪;33、连接杆;34、齿轮;35、驱动舵机;41、openmv摄像头;42、补光灯;43、异物报警灯。
具体实施方式
21.下面将结合附图及具体实施例对本实用新型作进一步详细说明。
22.实施例
23.如图1、图2、图3和图4所示,本实施例提供的水下机器人的控制系统,包括机体1,所述机体1由上壳、中壳和下壳密封拼接构成,机体1内部为中空结构,所述机体1内固定安装有主控器、六路电调控制器、舵机控制器、电源模块、温湿度传感器、压力传感器和电子罗盘;所述温湿度传感器通过i/o口与主控器传递信号,用于检测机体1内部的温湿度;所述压力传感器通过spi总线方式主控器进行通讯,用于检测机体1所受水压,从而得出机体1在水下的深度;所述电子罗盘通过i2c总线方式与主控器进行通讯,用于检测机体1的横滚角、俯仰角和航向角,实时监测机器人自身姿态;所述主控器还分别与电源模块、六路电调控制器和舵机控制器连接,电源模块为每个用电单元供电,六路电调控制器用于单独控制每个水平推进器21和每个垂直推进器22,舵机控制器用于控制抓取机构3的驱动舵机35工作;
24.所述机体1外两侧对称安装有动力推进器2,动力推进器2包括水平推进器21和垂直推进器22,所述水平推进器21通过水平安装架固定在机体1一侧中部,两个垂直推进器22通过垂直安装架对称安装在水平推进器21的前后两侧,水平推进器21用于驱动机体1水平移动,垂直推进器22同于驱动机体1进行浮潜;
25.所述机体1前端中部安装有抓取机构3和视觉识别装置4;
26.所述视觉识别装置4包括openmv摄像头41、补光灯42和异物报警灯43,补光灯42为openmv摄像头41提供补偿光亮,从而使得openmv摄像头41拍摄更加清晰,openmv摄像头41主要用于识别水下管道及管道表面的异物,同时还用于检测机体1在水中当前偏移水下管道的角度、截距,机器人和水下管道之间的距离;
27.所述抓取机构3包括固定架31和竖直设置的三组卡爪32,三组卡爪32分别位于固定架31的顶部、中部和底部,三组卡爪32通过连接杆33在竖直方向上固定对齐,位于固定架31顶部和底部的两组卡爪32的端部设有相互啮合的齿轮34,两组齿轮34分别固定连接在固定架31的顶部和底部,所述固定架31上固定安装有驱动舵机35,驱动舵机35的输出轴与其中一个齿轮34连接,所述驱动舵机35与舵机控制器连接,在检测到有需要清理的异物时,主控器通过舵机控制器操控驱动舵机35工作,完成卡爪32的夹紧,将异物进行抓取清理。
28.使用时,主控器接收到温湿度传感器、压力传感器、视觉识别装置4传输的各个参数信号,并根据这些信号判断机体1的位置和姿态,然后通过六路电调控制器控制每个水平推进器21或垂直推进器22,使机体1在水中行进,行进过程中温湿度传感器、压力传感器、视觉识别装置4不断的向主控器发送水下机体1的状态信息;
29.其中视觉识别装置4提取水下管道和异物图像,将机器人当前偏移水下管道的角度、截距,异物的形状和位置信息实时反馈给所述主控器,主控器根据反馈信息控制机体1沿水下管道运动,在运动过程中若视觉识别装置4识别到异物,将异物形状和位置信息传递给主控器,此时主控器接收到压力传感器反馈的机体1当前深度值和电子罗盘反馈的水下机器人当前姿态信息,主控器向异物报警灯43发送信号,异物报警灯43亮,同时主控器控制机体1调节自身姿态并进行下潜,下潜到异物所在位置时,主控器向舵机控制器发送指令,操控抓取机构3实现异物抓取,抓取异物后,主控器根据视觉识别装置4、压力传感器和电子罗盘实时反馈的信息操控机体1沿水下管道前进至比赛终点。
30.以上所述仅是本实用新型优选的实施方式,但本实用新型的保护范围并不局限于此,任何基于本实用新型所提供的技术方案和发明构思进行的改造和替换都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1