一种用于海上风电场的无人机自动机库的制作方法
1.本实用新型属于风力发电技术领域,尤其涉及一种用于海上风电场的无人机自动机库。
背景技术:
2.海上风电的无人机巡检一般从运维船甲板平台进行起降,稍有风浪便无法使用自动起降,只能采用人工起降,风浪较大时作业难度大,无人机起降和更换电池困难,严重影响无人机巡检效率和作业安全;此外,由于船只出海受到出海窗口期限制,由于海洋潮位的变化一天中只有在特定的时间才能出海,否则只能等待下次窗口期才能出海进行无人机的巡检作业,影响了巡检效率。
技术实现要素:
3.本实用新型的目的在于提供一种用于海上风电场的无人机自动机库,解决了现有技术中存在的上述不足。
4.为了达到上述目的,本实用新型采用的技术方案是:
5.本实用新型提供的一种用于海上风电场的无人机自动机库。包括机库本体;所述机库本体设置在海上风电场升压站;
6.所述机库本体的内腔中设置有用于无人机起落的无人机起落平台,所述无人机起落平台上设置有用于对无人机进行充电的充电单元;
7.所述无人机起落平台和充电单元连接有控制系统。
8.优选地,所述充电单元为无线充电面板;所述无线充电面板与控制系统连接。
9.优选地,所述无人机起落平台包括本体,所述本体的中心位置处设置有用于无人机起落的无人机锁定区域,所述无人机锁定区域的正下方设置有无人机充电单元;所述无人机锁定区域的上表面设置有用于提供机库本体位置信息的二维码。
10.优选地,所述本体上还设置有用于对无人机进行定位固定的推杆式无人机固定装置。
11.优选地,所述推杆式无人机固定装置包括上层单元和下层单元,上层单元包为两根上层滑动固定杆、上层推杆电机和上层固定杆滑轨,其中,所述两根上层滑动固定杆滑动安装在上层固定杆滑轨上;
12.所述上层推杆电机设置有两个,两个上层推杆电机分别与两根上层滑动固定杆驱动连接;
13.下层单元包括两根下层滑动固定杆、下层推杆电机和下层固定杆滑轨,其中,两根下层滑动固定杆滑动安装在下层固定杆滑轨上;所述下层推杆电机与两根下层滑动固定杆驱动连接;
14.所述下层推杆电机设置有两个,两个下层推杆电机分别与两根下层滑动固定杆驱动连接。
15.优选地,两根上层滑动固定杆布置在无人机起落平台上设置的无线充电面板为中心的两侧;
16.两根下层滑动固定杆布置在无人机起落平台上设置的无线充电面板为中心的两侧;
17.所述下层滑动固定杆的运动方向与上层滑动固定杆的运动方向互相垂直。
18.优选地,所述机库本体为表面具有防腐蚀和防盐雾的立方体结构。
19.优选地,所述机库本体上置于对称位置的两个侧面均开设有水平对开的机库门;
20.所述机库门上设置有用于实现机库门自动开闭的第一驱动单元;
21.所述第一驱动单元与控制系统连接。
22.和现有技术相比较,本实用新型具备如下优点:
23.本实用新型提供的一种用于海上风电场的无人机自动机库,能够实现海上风电巡检用无人机在海上升压站存储、充电以及自动起降和巡检功能,不需要依靠运维船出海作业即可远程控制无人机实现全天候的海上风电巡检;解决了背景技术中存在的海上无人机巡检效率低的问题。
24.进一步的,自动机库两侧设置均可打开的对开门,以及可推出的无人机起降平台相对于现有的顶部打开设计能够有效减少无人机起降时海上风电盐雾和水汽对自动机库内部电子器件的腐蚀,提高自动机库的可靠性并减少维护次数。
附图说明
25.图1是推杆式无人机固定装置的主视图;
26.图2是推杆式无人机固定装置的侧视图;
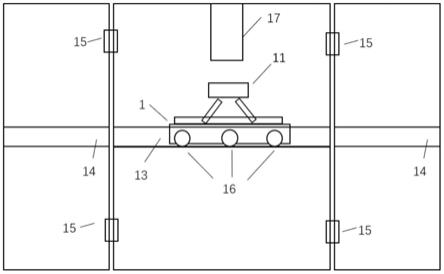
27.图3两侧机库门打开条件下的自动机库的主视图;
28.其中,1、无人机起落平台2、上传推杆电机3、下层推杆电机4、上层滑动固定杆5、下层滑动固定杆6、二维码7、无人机锁定区域8、充电单元9、上层固定杆滑轨10、下层固定杆滑轨11、无人机12、无人机起落架13、第二凹槽轨道14、第一凹槽轨道15、第一驱动单元16、第二驱动单元17、电池更换单元。
具体实施方式
29.下面结合附图,对本实用新型进一步详细说明。
30.本实用新型提供的系统一种用于海上风电场的无人机自动机库,包括用于向无人机提供起降平台的机库本体。
31.所述机库本体设置在海上风电场升压站上。
32.所述机库本体为表面具有防腐蚀和防盐雾的金属立方体结构。
33.所述机库本体置于对称位置的两个侧面均开设有水平对开的机库门。
34.所述机库门上的第一驱动单元15连接有控制系统。
35.每个机库门的内壁上均开设有第一凹槽轨道14,所述第一凹槽轨道14沿水平方向开设。
36.所述机库本体的内腔中设置有无人机起落平台1、、第二驱动单元16、充电单元8和电池更换单元17,其中,所述机库本体内腔中设置有第二凹槽轨道13,所述第二凹槽轨道13
与第一凹槽轨道14对接连接,形成无人机起落平台1的滑行轨道。
37.所述无人机起落平台1与第二驱动单元16驱动连接,用于实现通过第二驱动单元带动无人机起落平台1沿滑行轨道来回水平移动。
38.所述充电单元与无人机之间通过无线装置连接,用于向无人机充电。
39.所述充电单元为无线充电面板。
40.电池更换单元包括多自由度机械手和无人机备用电池,其中,所述多自由度机械手用于更换无人机的电池。
41.所述第二驱动单元与控制系统连接;所述控制系统与数据采集单元连接。
42.所述数据采集单元用于获取气象信息、无人机当前位置信息和距离,以及无人机起落信息。
43.所述无人机起落平台1包括本体,所述本体的中心位置处设置有用于无人机起落的无人机锁定区域7,所述无人机锁定区域7的正下方设置有无人机充电单元;所述无人机锁定区域7的上表面设置有用于提供机库本体位置信息的二维码。
44.所述本体的底部设置有滑轮;同时,所述本体与滑行轨道滑动连接。
45.所述本体上还设置有用于对无人机进行固定的推杆式无人机固定装置。
46.所述推杆式无人机固定装置包括上层单元和下层单元,上层单元包为两根上层滑动固定杆4、上层推杆电机和上层固定杆滑轨9,其中,所述两根上层滑动固定杆4滑动安装在上层固定杆滑轨9上;所述上层推杆电机设置有两个,两个上层推杆电机分别与两根上层滑动固定杆4驱动连接。
47.所述上层固定杆滑轨9安装在无人机起落平台的侧边处。
48.两根上层滑动固定杆4布置在无人机起落平台上设置的无线充电面板为中心的两侧。
49.下层单元包括两根下层滑动固定杆5、下层推杆电机和下层固定杆滑轨10,其中,两根下层滑动固定杆5滑动安装在下层固定杆滑轨10上;所述下层推杆电机与两根下层滑动固定杆5驱动连接。
50.所述下层推杆电机设置有两个,两个下层推杆电机分别与两根下层滑动固定杆5驱动连接。
51.所述下层固定杆滑轨10安装在无人机起落平台的剩余侧边处。
52.所述上层固定杆滑轨9和下层固定杆滑轨10形成框型结构。
53.两根下层滑动固定杆5布置在无人机起落平台上设置的无线充电面板为中心的两侧。
54.所述下层滑动固定杆5的运动方向与上层滑动固定杆4的运动方向互相垂直。
55.所述推杆式无人机固定装置的工作过程:
56.当无人机降落在起落平台后,无人机向自动机库的控制系统发送请求锁定信号,自动机库的控制系统启动推杆电机,进而通过上层滑动固定杆4和下层滑动固定杆5推动无人机的起落架,将无人机精确移动至指定位置并通过上层滑动固定杆4和下层滑动固定杆5将无人机起落架进行固定。
57.自动机库的工作过程:
58.当无人机需要降落停机时,通过导航系统获取自动机库的位置信息和距离;同时
通过无线通信系统向机库本体的数据采集单元实时传输当前自身的位置信息和距离;
59.控制系统根据接收到的无人机当前位置信息和距离,控制第一驱动单元的启停,进而实现机库门的开闭;
60.当机库门打开时,控制系统控制第二驱动单元的启停,进而带动无人机起落平台移动至自动机库外侧,便于无人机的降落。
61.当无人机需要起飞作业时,风电场运行人员对控制系统下达巡检指令,控制系统通过数据采集单元获取气象信息,根据气象信息选取处于背风处的自动机库门,进而控制第一驱动单元的启停,进而实现该处于背风处的机库门的开闭;
62.当机库门打开时,控制系统控制第二驱动单元的启停,进而带动无人机起落平台移动至自动机库外侧,便于无人机的起飞;
63.自动机库感应到无人机降落后由推杆电机推送至指定位置后,即接通无线充电面板的电源供电,开始对无人机进行无线充电,充电过程中无人机时刻检测剩余电量,在充满后向自动机库发送信息,自动机库控制断开充电面板的电源供电。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1