万向抓地锚、浮动式系泊系统和海上风力发电机组的制作方法
1.本实用新型涉及抓地锚技术领域,尤其涉及一种万向抓地锚、浮动式系泊系统和海上风力发电机组。
背景技术:
2.目前,漂浮式风机通常采用锚链和与锚链连接的抓地锚固定,当其中一个方向的锚链断裂后,漂浮式风机失去了在该方向上所受的拉力,同时,由于现有的抓地锚大都为单向抓力锚,仅能承受一个方向的锚力,导致漂浮式风机在某一方向上的锚链断裂后,原有的受力平衡体系被破坏,使得漂浮式风机随海上风浪的晃动较为剧烈,在海上的漂浮位移过大,降低了漂浮式风机的安全性。
3.因此,如何提高漂浮式风机的安全性,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供一种万向抓地锚,以提高漂浮式风机的安全性。
5.为了实现上述目的,本实用新型提供了如下技术方案:
6.一种万向抓地锚,包括锚链和与所述锚链转动连接的抓地锚本体,所述锚链远离所述抓地锚本体的一端能够与待固定设备连接;
7.其中,所述抓地锚本体包括多个能够安插在待锚入部位的锚爪,多个所述锚爪包括至少一个第一锚爪和至少一个第二锚爪,所述第一锚爪安插在待锚入部位后能够承受第一锚力和第三锚力,所述第二锚爪安插在待锚入部位后能够承受第二锚力和第三锚力,所述第一锚力沿第一方向,所述第二锚力沿第二方向,所述第三锚力沿第三方向,并且所述第一方向、所述第二方向和所述第三方向能够构成三维空间。
8.优选地,在上述万向抓地锚中,所述锚爪上设有便于嵌入待锚入部位的锚牙,所述锚爪与所述锚牙为一体成型件。
9.优选地,在上述万向抓地锚中,所述锚牙为直线型锚牙。
10.优选地,在上述万向抓地锚中,所述锚牙为折角型锚牙。
11.优选地,在上述万向抓地锚中,所述锚牙为折弯型锚牙。
12.优选地,在上述万向抓地锚中,相邻的所述锚爪之间的夹角相等。
13.优选地,在上述万向抓地锚中,所述抓地锚本体与所述锚链通过转动连接件连接,所述转动连接件包括呈中空结构的锚冠、套接于所述锚冠的内部的转动件和设置于所述锚冠与所述转动件之间的滚动件。
14.优选地,在上述万向抓地锚中,所述滚动件为滚珠,并且所述转动件的外壁上设有用于安装所述滚珠的导向结构。
15.优选地,在上述万向抓地锚中,所述导向结构为与所述滚珠的外壁适配的球形凹
陷部。
16.优选地,在上述万向抓地锚中,所述转动连接件还包括设置于所述转动件的锚环。
17.一种浮动式系泊系统,包括浮动式平台和多个如上任意一项所述的万向抓地锚,所述万向抓地锚的锚链连接所述浮动式平台,所述万向抓地锚的锚爪安插在待锚入部位。
18.优选地,在上述浮动式系泊系统中,所述万向抓地锚的数量为四个,分别为第一万向抓地锚、第二万向抓地锚、第三万向抓地锚和第四万向抓地锚,并且所述第一万向抓地锚、所述第二万向抓地锚、所述第三万向抓地锚和所述第四万向抓地锚均布在所述浮动式平台的四周。
19.优选地,在上述浮动式系泊系统中,所述万向抓地锚的数量为三个,分别为第五万向抓地锚、第六万向抓地锚和第七万向抓地锚,并且所述第五万向抓地锚、所述第六万向抓地锚和所述第七万向抓地锚均布在所述浮动式平台的四周。
20.一种海上风力发电机组,包括风力发电机组和如上任意一项所述的浮动式系泊系统,所述风力发电机组设置于所述浮动式平台上。
21.使用本实用新型所提供的万向抓地锚时,将锚链远离抓地锚本体的一端与待固定设备连接,将多个锚爪安插在待锚入部位,由于该万向抓地锚的多个锚爪中至少有一个第一锚爪和至少一个第二锚爪,第一锚爪安插在待锚入部位后能够承受第一锚力和第三锚力,第二锚爪安插在待锚入部位后能够承受第二锚力和第三锚力,第一锚力沿第一方向,第二锚力沿第二方向,第三锚力沿第三方向,第一方向、第二方向和第三方向能够构成三维空间,由于三维空间内的任意一个力均可以分解至第一方向、第二方向和第三方向上,因此,该抓地锚本体能够承受三维空间内任意方向的锚力,亦即该抓地锚本体为万向抓地锚本体,当拉拽待固定设备的多个锚链中的一根断裂,待固定设备失去该锚链的拉力时,亦即原有的受力平衡系统被打破时,其余锚链能够绕抓地锚本体转动,同时抓地锚本体的多个锚爪自动在三维空间上调整受力方向,将待固定设备固定在新的受力平衡位置上,形成新的受力平衡系统。由此可见,使用本实用新型所提供的万向抓地锚时,当漂浮式风机的其中一个万向抓地锚的锚链断裂后,其余万向抓地锚的抓地锚本体能够自动调整受力方向,同时,转动连接的锚链能够使漂浮式风机重新寻找新的受力平衡位置,在新的受力平衡位置上,其余万向抓地锚对漂浮式风机形成新的受力平衡体系,减小了漂浮式风机随海上风浪的晃动程度,减小了漂浮式风机在海上的漂浮位移,提高了漂浮式风机的安全性。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
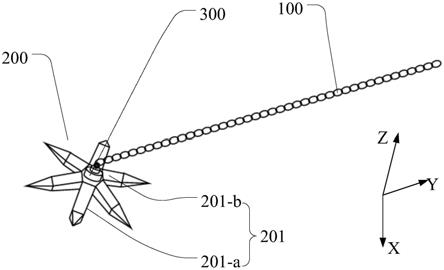
23.图1为本实用新型实施例所提供的一种万向抓地锚的结构示意图;
24.图2为本实用新型实施例所提供的一种抓地锚本体的结构示意图;
25.图3为本实用新型实施例所提供的一种锚爪的结构示意图;
26.图4为本实用新型实施例所提供的另一种锚爪的结构示意图;
27.图5为本实用新型实施例所提供的另一种锚爪的结构示意图;
28.图6为本实用新型实施例所提供的一种转动连接件的结构示意图;
29.图7为本实用新型实施例所提供的一种浮动式系泊系统在锚链断裂前的受力示意图;
30.图8为本实用新型实施例所提供的一种浮动式系泊系统在锚链断裂后的受力示意图;
31.图9为本实用新型实施例所提供的另一种浮动式系泊系统在锚链断裂前的受力示意图;
32.图10为本实用新型实施例所提供的另一种浮动式系泊系统在锚链断裂后的受力示意图。
33.其中,100为锚链,200为抓地锚本体,201为锚爪,201-a为第一锚爪,201-b为第二锚爪,2011为锚牙,300为转动连接件,301为锚冠,302为转动件,3021为导向结构,303为滚动件,304为锚环,400为浮动式平台,401为第一万向抓地锚,402为第二万向抓地锚,403为第三万向抓地锚,404为第四万向抓地锚,405为第五万向抓地锚,406为第六万向抓地锚,407为第七万向抓地锚,x为第一方向,y为第二方向,z为第三方向。
具体实施方式
34.有鉴于此,本实用新型的核心在于提供一种万向抓地锚,以提高漂浮式风机的安全性。
35.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
36.如图1至图10所示,本实用新型实施例公开了一种万向抓地锚,包括锚链100和与锚链100转动连接的抓地锚本体200,锚链100远离抓地锚本体200的一端能够与待固定设备连接。
37.其中,抓地锚本体200包括多个能够安插在待锚入部位的锚爪201,多个锚爪201包括至少一个第一锚爪201-a和至少一个第二锚爪201-b,第一锚爪201-a安插在待锚入部位后能够承受第一锚力和第三锚力,第二锚爪201-b安插在待锚入部位后能够承受第二锚力和第三锚力,第一锚力沿第一方向x,第二锚力沿第二方向y,第三锚力沿第三方向z,并且第一方向x、第二方向y和第三方向z能够构成三维空间。
38.使用本实用新型所提供的万向抓地锚时,将锚链100远离抓地锚本体200的一端与待固定设备(本实用新型实施例中为浮动式平台400)连接,将多个锚爪201安插在待锚入部位(本实用新型实施例中为海床),由于该万向抓地锚的多个锚爪201中至少有一个第一锚爪201-a和至少一个第二锚爪201-b,第一锚爪201-a安插在待锚入部位后能够承受第一锚力和第三锚力,第二锚爪201-b安插在待锚入部位后能够承受第二锚力和第三锚力,第一锚力沿第一方向x,第二锚力沿第二方向y,第三锚力沿第三方向z,第一方向x、第二方向y和第三方向z能够构成三维空间,由于三维空间内的任意一个力均可以分解至第一方向x、第二方向y和第三方向z上,因此,该抓地锚本体200能够承受三维空间内任意方向的锚力,亦即该抓地锚本体200为万向抓地锚本体,当拉拽待固定设备的多个锚链100中的一根断裂,待
固定设备失去该锚链100的拉力时,亦即原有的受力平衡系统被打破时,其余锚链100能够绕抓地锚本体200转动,同时抓地锚本体200的多个锚爪201自动在三维空间上调整受力方向,将待固定设备固定在新的受力平衡位置上,形成新的受力平衡系统。由此可见,使用本实用新型所提供的万向抓地锚时,当漂浮式风机的其中一个万向抓地锚的锚链100断裂后,其余万向抓地锚的抓地锚本体200能够自动调整受力方向,同时,转动连接的锚链100能够使漂浮式风机重新寻找新的受力平衡位置,在新的受力平衡位置上,其余万向抓地锚对漂浮式风机形成新的受力平衡体系,减小了漂浮式风机随海上风浪的晃动程度,减小了漂浮式风机在海上的漂浮位移,提高了漂浮式风机的安全性。
39.需要说明的是,上述万向抓地锚能够但不仅限于用于浮动式平台400的固定,还可以用于船舶或者吊箱的固定,因此,本实用新型对该万向抓地锚的应用领域不作具体限定。
40.应当理解,本实用新型对上述第一方向x、第二方向y和第三方向z的两两之间的夹角不作具体限定,只要是能够构成三维空间的夹角均属于本实用新型保护范围内。
41.如图3至图5所示,锚爪201上设有便于嵌入待锚入部位的锚牙2011,锚爪201与锚牙2011为一体成型件,以便于通过锚牙2011的尖角使得锚爪201能够顺利嵌入待锚入部位,同时通过一体成型结构提高该锚爪201的结构强度,提高该万向抓地锚的承载能力。
42.应当理解,本实用新型对锚爪201的具体形状和尺寸不作限定,只要是能够满足使用要求的形状和尺寸均属于本实用新型保护范围内;优选地,本实用新型提供了三种具体的锚爪201结构。
43.如图3所示,锚牙2011为直线型锚牙2011,亦即锚牙2011自锚爪201的一端向靠近待锚入部位的一侧直线延伸,结构简单,便于加工制造。
44.如图4所示,锚牙2011为折角型锚牙2011,亦即锚牙2011自锚爪201的一端向靠近待锚入部位的一侧倾斜延伸,使锚爪201呈弯折结构,以便于使锚爪201能够深入嵌入待锚入部位,提高锚爪201与待锚入部位的锚接强度。
45.应当理解,本实用新型对上述锚牙2011的倾斜程度和长度均不作具体限定,实际应用中,可以根据力学性能要求适应性地调整锚牙2011的倾斜程度和长度,只要是能够满足使用要求的倾斜程度和长度均属于本实用新型保护范围内。
46.如图5所示,锚牙2011为折弯型锚牙2011,亦即锚牙2011自锚爪201的一端向靠近待锚入部位的一侧按照一定的曲率弯曲延伸,使锚爪201呈弯曲结构,以便于使锚爪201能够深入嵌入待锚入部位,提高锚爪201与待锚入部位的锚接强度。
47.同样地,本实用新型对上述锚牙2011的曲率和长度均不作具体限定,实际应用中,可以根据力学性能要求适应性地调整锚牙2011的曲率和长度,只要是能够满足使用要求的曲率和长度均属于本实用新型保护范围内。
48.进一步地,多个锚爪201可以在抓地锚本体200上随机分布、对称分布、阵列分布或者根据受力需求将锚爪201按照特定形式分布,只要是能够满足使用要求的分布形式均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的相邻的锚爪201之间的夹角相等,以便于使抓地锚本体200受力均衡。
49.具体地,如图1和图2所示的万向抓地锚包括六个锚爪201,相邻的锚爪201之间的夹角相等,亦即相邻的锚爪201之间的夹角为60
°
,以便于使锚链100在与抓地锚本体200相对转动0~360
°
中的任意一角度后,抓地锚本体200均能保持受理均衡。
50.更进一步地,抓地锚本体200与锚链100通过转动连接件300连接,转动连接件300包括呈中空结构的锚冠301、套接于锚冠301的内部的转动件302和设置于锚冠301与转动件302之间的滚动件303,以便于通过滚动件303的滚动实现转动件302和锚冠301之间的转动连接,实现转动锚本体和锚链100之间的转动连接。
51.需要说明的是,滚动件303可以是滚珠或者辊子等类型,只要是能够在锚冠301和转动件302之间滚动的零件类型均属于本实用新型保护范围内;优选地,本实用新型所提供的滚动件303为滚珠。
52.并且,转动件302的外壁上设有用于安装滚珠的导向结构3021,以便于通过导向结构3021为滚珠的转动提供导向作用,防止转动件302相对于锚冠301发生歪斜,导致转动件302与锚冠301之间的转动发生卡滞,影响正常使用。
53.应当理解,上述导向结构3021可以是与滚珠的外壁适配的滚槽或者球形凹陷部等结构,只要是能够对滚珠的滚动起到导向作用的结构均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的导向结构3021为与滚珠的外壁适配的球形凹陷部。
54.本实用新型所提供的转动连接件300还包括设置于转动件302的锚环304,以便于将锚链100连接在锚环304上,实现锚链100与抓地锚本体200之间的连接。
55.此外,本实用新型还公开了一种浮动式系泊系统,包括浮动式平台400和多个如上任意一项所述的万向抓地锚,万向抓地锚的锚链100连接浮动式平台400,万向抓地锚的锚爪201安插在待锚入部位,以便于通过该万向抓地锚固定浮动式平台400。
56.如图7所示,本实用新型的一个实施例中,万向抓地锚的数量为四个,分别为第一万向抓地锚401、第二万向抓地锚402、第三万向抓地锚403和第四万向抓地锚404,并且第一万向抓地锚401、第二万向抓地锚402、第三万向抓地锚403和第四万向抓地锚404均布在浮动式平台400的四周,亦即相邻的万向抓地锚之间的夹角为90
°
,所有万向抓地锚的锚链100均未发生断裂时,第一万向抓地锚401、第二万向抓地锚402、第三万向抓地锚403和第四万向抓地锚404对浮动式平台400的力分别为f1、f2、f3和f4,浮动式平台400所受的外力为f,则f1+f2+f3+f4=f,浮动式受力平台受力平衡,具有较好的稳定性。
57.如图8所示,当第一万向抓地锚401的锚链100发生断裂时,原有的受力平衡体系被打破,第二万向抓地锚402的锚链100、第三万向抓地锚403的锚链100和第四万向抓地锚404的锚链100带动浮动式平台400移动至新的平衡位置,同时,第二万向抓地锚402的抓地锚本体200、第三万向抓地锚403的抓地锚本体200和第四万向抓地锚404的抓地锚本体200自动调整受力方向,形成新的受力平衡体系,此时,第二万向抓地锚402、第三万向抓地锚403和第四万向抓地锚404对浮动式平台400的力分别为f22、f33和f44,f22+f33+f44=f,即浮动式平台400在新的受力平衡体系中受力平衡,减小了设置于浮动式平台400上的漂浮式风机随海上风浪的晃动程度,减小了漂浮式风机在海上的漂浮位移,提高了漂浮式风机的安全性。
58.如图9所示,本实用新型的另一个实施例中,万向抓地锚的数量为三个,分别为第五万向抓地锚405、第六万向抓地锚406和第七万向抓地锚407,并且第五万向抓地锚405、第六万向抓地锚406和第七万向抓地锚407均布在浮动式平台400的四周,亦即相邻的万向抓地锚之间的角度均为120
°
,所有万向抓地锚的锚链100均未发生断裂时,第五万向抓地锚405、第六万向抓地锚406和第七万向抓地锚407对浮动式平台400的力分别为f5、f6和f7,浮
动式平台400所受的外力为f,则f5+f6+f7=f,浮动式受力平台受力平衡,具有较好的稳定性。
59.如图10所示,当第五万向抓地锚405的锚链100发生断裂时,原有的受力平衡体系被打破,第六万向抓地锚406的锚链100和第七万向抓地锚407的锚链100带动浮动式平台400移动至新的平衡位置,同时,第六万向抓地锚406的抓地锚本体200和第七万向抓地锚407的抓地锚本体200自动调整受力方向,形成新的受力平衡体系,此时,第六万向抓地锚406和第七万向抓地锚407对浮动式平台400的力分别为f66和f77,f66+f77=f,即浮动式平台400在新的受力平衡体系中受力平衡,浮动式平台400能够在较小的区域内移动,减小了漂浮式风机在海上的漂浮位移,提高了漂浮式风机的安全性。
60.此外,本实用新型还公开了一种海上风力发电机组,包括风力发电机组和如上任意一项所述的浮动式系泊系统,风力发电机组设置于浮动式平台400上,由于该海上风力发电机组包括了如上任意一项所述的浮动式系泊系统,因此兼具了上述浮动式系泊系统的所有技术效果,本文在此不再一一赘述。
61.本实用新型的说明书和权利要求书及上述附图中的术语“第一”和“第二”等是用于区别不同的对象,而不是用于描述特定的顺序。此外术语“包括”和“具有”以及他们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有设定于已列出的步骤或单元,而是可包括没有列出的步骤或单元。
62.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1