用于远距离作业的水下航行器的制作方法
1.本技术涉及水下航行器领域,具体而言,涉及一种用于远距离作业的水下航行器。
背景技术:
2.随着国家对于海洋发展战略的大力推进,水下航行器(auv,autonomous underwater vehicle)被大量地应用到海洋工程领域。目前,水下航行器主要采用锂电池组为系统提供能源,其续航力是一个重要指标。为实现更长的续航时间、更远的续航里程,水下航行器的设计中一般采用增加能源携带、提高推进效率、降低水下航行器阻力等措施。
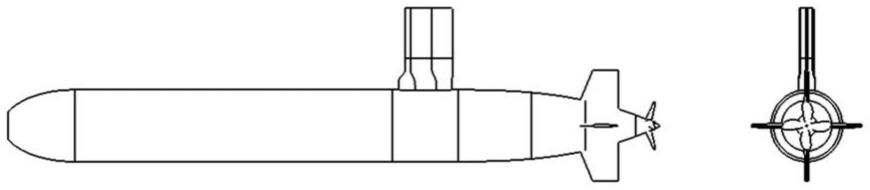
3.在传统的水下航行器上,螺旋桨和推进器多选用十字舵或“x”舵的操纵形式,这两种形式均具有可靠性高、结构简单的特点。如图1所示,十字舵操纵形式的水下航行器具有四个舵,即两个水平舵和两个垂直舵;如图2所示,“x”舵操纵形式的水下航行器也具有四个舵,整体呈x型布置。
4.本技术的发明人发现,在水下航行器实际工作的过程中,根据不同工况,十字舵/“x”舵的阻力占水下航行器总阻力的5%~15%,这对水下航行器的续航力产生了很大的影响,使得水下航行器很难应用于远距离水下航行作业。
5.因此,需要一种水下航行器,具有新的推进器的操纵形式,能够实现水下航行器的远距离作业。
6.在所述背景技术部分,公开的上述信息仅用于加强对本技术的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术信息。
技术实现要素:
7.本技术旨在提供一种水下航行器,能够实现水下航行器航向控制的同时降低航行阻力,进而提高续航力。
8.根据本技术的一方面,提出一种用于远距离作业的水下航行器,包括航行器壳体、推进器、舵部、控制器和外接天线;所述舵部仅包括第一水平舵和第二水平舵,所述第一水平舵和所述第二水平舵具有相同的尺寸;所述第一水平舵可转动地设置在所述航行器壳体的一侧;所述第二水平舵可转动地设置在所述航行器壳体的、与所述第一水平舵相对称的另一侧;所述推进器设置在所述航行器壳体的艉部;所述控制器控制所述第一水平舵旋转和定位,所述控制器还控制所述第二水平舵旋转和定位;所述外接天线用于所述控制器与终端进行信号交互。
9.根据本技术的一些实施例,所述航行器壳体内包括驱动器;所述驱动器在所述控制器的控制下分别驱动所述第一水平舵和所述第二水平舵。
10.根据本技术的一些实施例,所述航行器壳体内还包括动力装置;所述动力装置调配所述水下航行器的能源供给。
11.根据本技术的一些实施例,所述推进器是单螺旋桨结构。
12.根据本技术的一些实施例,所述航行器壳体整体呈细长圆柱体,所述航行器壳体
的艏部呈半椭球体,所述航行器壳体的艉部为流线型锥体,用于降低航行时的水流阻力。
13.根据本技术的一些实施例,所述控制器通过无线电台、wifi、4g、5g、水声通讯、卫星通讯、蓝绿激光通信、中微子通信和量子通信中的一种或多种与终端进行信号交互。
14.根据本技术的一些实施例,所述外接天线设置于所述航行器壳体的顶部。
15.根据本技术的一些实施例,通过转动所述第一水平舵和所述第二水平舵实现所述水下航行器的俯仰运动和横滚运动。
16.根据本技术的一些实施例,所述第一水平舵与所述第二水平舵同步地向所述水下航行器的顶部或底部旋转,以实现所述水下航行器的俯仰运动。
17.根据本技术的一些实施例,所述第一水平舵向所述水下航行器的顶部旋转,所述第二水平舵同时向所述水下航行器的底部旋转,以实现所述水下航行器的左向横滚运动;所述第一水平舵向所述水下航行器的底部旋转,所述第二水平舵同时向所述水下航行器的顶部旋转,以实现所述水下航行器的右向横滚运动。
18.根据本技术的示例实施例,水下航行器的舵部有且仅有两个水平舵,使得水下航行器在航行过程中受到的总阻力小,适于远距离航行。
19.根据本技术的示例实施例,本技术的水下航行器通过控制器分别控制第一水平舵和第二水平舵的旋转和定位,远程实现水平舵实现水下航行器的俯仰运动及深度控制,通过水平舵的差动角度实现水下航行器的横滚运动,进而通过横滚与航向的耦合作用以及横滚姿态下水平舵在航向上产生的驱动力实现水下航行器的航向控制,从而实现水下航行器的空间运动能力。
20.根据本技术的一些实施例,本技术的水下航行器的控制器通过蓝绿激光通信、中微子通信和量子通信中的一种或多种与终端进行信号交互,实现水下航行器的超远距离实时通信,在本技术的水下航行器执行远距离航行作业的过程中,持续保持对水下航行器的控制。
21.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
附图说明
22.通过参照附图详细描述其示例实施例,本技术的上述和其它目标、特征及优点将变得更加显而易见。
23.图1示出传统的水下航行器十字舵操纵形式的结构示意图。
24.图2示出传统的水下航行器“x”舵操纵形式的结构示意图。
25.图3示出根据本技术示例实施例的水下航行器的结构示意图。
26.图4示出根据本技术一些实施例的水下航行器的结构示意图。
27.图5示出根据本技术一些实施例的水下航行器的仰冲状态结构示意图。
28.图6示出根据本技术一些实施例的水下航行器的俯冲状态结构示意图。
29.图7a示出根据本技术一些实施例的水下航行器的左滚状态结构左视图。
30.图7b示出根据本技术一些实施例的水下航行器的左滚状态结构右视图。
31.图7c示出根据本技术一些实施例的水下航行器的左滚状态结构后视图。
32.图8a示出根据本技术一些实施例的水下航行器的右滚状态结构左视图。
33.图8b示出根据本技术一些实施例的水下航行器的右滚状态结构右视图。
34.图8c示出根据本技术一些实施例的水下航行器的右滚状态结构后视图。
35.图9示出根据本技术示例实施例的水下航行器的俯仰运动方法流程示意图。
36.图10示出根据本技术示例实施例的水下航行器的横滚运动方法流程示意图。
37.图11示出根据本技术一些实施例的水下航行器的通信流程框图。
具体实施方式
38.现在将参考附图更全面地描述示例实施例。然而,示例实施例能够以多种形式实施,且不应被理解为限于在此阐述的实施例;相反,提供这些实施例使得本技术将全面和完整,并将示例实施例的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
39.所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本公开的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而没有这些特定细节中的一个或更多,或者可以采用其它的方式、组元、材料、装置或等。在这些情况下,将不详细示出或描述公知结构、方法、装置、实现、材料或者操作。
40.附图中所示的流程图仅是示例性说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解,而有的操作/步骤可以合并或部分合并,因此实际执行的顺序有可能根据实际情况改变。
41.本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其他步骤或单元。
42.本技术提出一种新的水下航行器,能够实现水下航行器航向控制的同时降低航行阻力,进而提高续航力。
43.根据本技术的技术构思,水下航行器的舵部有且仅有两个水平舵,使得水下航行器在航行过程中受到的总阻力小,适于远距离航行。
44.根据本技术的技术构思,通过水平舵实现水下航行器的俯仰运动及深度控制,通过水平舵的差动角度实现水下航行器的横滚运动,进而通过横滚与航向的耦合作用以及横滚姿态下水平舵在航向上产生的驱动力实现水下航行器的航向控制,从而实现水下航行器的空间运动能力。
45.下面将参照附图,对根据本技术实施例的水下航行器进行详细说明。
46.图3示出根据本技术示例实施例的水下航行器的结构示意图。
47.参见图3,示例实施例的水下航行器包括航行器壳体101、推进器103、舵部105、控制器107和外接天线109。
48.如图3所示,舵部105仅包括第一水平舵1051和第二水平舵1053;第一水平舵1051设置在航行器壳体101的一侧,并可在控制器107的控制下旋转至固定角度;第二水平舵1053与第一水平舵1051相对地设置在航行器壳体101的另一侧,并可在控制器107的控制下
旋转至固定角度;推进器103设置在航行器壳体101的艉部;第一水平舵1051和第二水平舵1053在工作时互不干扰,在推进器103的推动下,通过旋转第一水平舵1051和第二水平舵1053,能够实现水下航行器的俯仰运动和横滚运动。外接天线109设置于水下航行器的顶部,用于控制器107与终端进行信号交互。
49.根据示例实施例,推进器103是单螺旋桨结构。航行器壳体101整体呈细长圆柱体。
50.根据本技术的一些实施例,航行器壳体101的艏部呈半椭球体,艉部为流线型锥体,用于降低航行时的水流阻力。根据一些实施例,第一水平舵1051和第二水平舵1053具有相同的尺寸。
51.如图11所示,通信功能是指水下航行器与水面操控台通过某种通信通道进行信息交互。在常规情况下,水下航行器的控制器107和外接天线109具有无线电台、wifi、4g、水声通讯、卫星通讯5种通信通道。其中,无线电台通讯距离数公里到数十功率,wifi通讯距离数十米,水声通讯距离数公里,4g、5g和卫星通讯受信号覆盖影响,距离较远。操控台需要发送的信息包括任务文件、控制指令、水下航行器状态查询,水下航行器需要发送的信息包括任务使命文件接收反馈、控制指令接收反馈、水下航行器状态反馈、水下航行器状态记录文件。按照通信的带宽不同,各种通信通道分别传递不同的信息。
52.根据本技术的一些实施例,在一些特定情况下,控制器107通过蓝绿激光通信、中微子通信和量子通信中的一种或多种与终端进行信号交互。其中优选地,蓝绿激光通信的蓝绿激光波长为450nm~530nm。水下激光通信技术利用激光载波传输信息。由于波长450nm~530nm的蓝绿激光在水下的衰减较其他光波段小得多,因此蓝绿激光作为窗口波段应用于水下通信。蓝绿激光通信的优势是拥有几种方式中最高传输速率。在超近距离下,其速率可到达100mbps级。蓝绿激光通信方向性好,接收天线较小。蓝绿激光水下通信具有海水穿透能力强、数据传输速率快、方向性好、设备轻巧且抗截获和抗核辐射影响能力好等优点。
53.根据本技术的一些实施例,在一些特定情况下,控制器107通过量子通信于终端进行信号交互,量子通信的光子为405nm。量子通信用于解决海水对光的损耗问题。在海水中,由于海水对光线具有很强的吸收和散射作用,对光的传输非常不利,这也是为什么海水乍看起来并不是做为量子通信的好的介质。克服这个困难的方法是利用405nm的光子,这个波段位于海水的“蓝绿窗口”,在此窗口内,海水的吸收较其他波段要弱。
54.根据本技术的一些实施例,外接天线109的数据传输速率不小于20mb/s,这一速度可实时传输视频画面,在本技术的水下航行器航行过程中,通过外接天线实时获取水下航行器的航行环境,确保水下航行器能即时进行俯仰、横滚运动,以克服环境阻碍。优选地,外接天线109的传输速率不小于100mb/s。根据本技术的技术构思,为了实现水下航行的远距离航行以及在水下航行器远距离航行的过程中对水下航行器进行实时操控,通过位于水下航行器顶部的集成多个通信模块的外接天线109和控制器107,本技术的水下航行器使用多种通信方式,在本技术的水下航行器在远距离行驶过程中的通讯稳定。
55.图4示出根据本技术一些实施例的水下航行器的结构示意图。
56.参见图4,一些实施例的水下航行器包括航行器壳体101、推进器103、舵部105、控制器107和外接天线109。
57.如图4所示,舵部105仅包括第一水平舵1051和第二水平舵1053;第一水平舵1051设置在航行器壳体101的一侧,并可在控制器107的控制下旋转至固定角度;第二水平舵
1053与第一水平舵1051相对地设置在航行器壳体101的另一侧,并可在控制器107的控制下旋转至固定角度;推进器103设置在航行器壳体101的艉部;第一水平舵1051和第二水平舵1053在工作时互不干扰,在推进器103的推动下,通过旋转第一水平舵1051和第二水平舵1053,能够实现水下航行器的俯仰运动和横滚运动。外接天线109用于控制器107与终端进行信号交互。
58.如图4所示,航行器壳体101内包括通讯装置1011、驱动器1013和动力装置1015,通讯装置1011用于与控制器107进行信号交互,驱动器1013在控制器107的控制下驱动第一水平舵1051和第二水平舵1053,动力装置1015用于水下航行器的能源供给与调配。
59.图5示出根据本技术一些实施例的水下航行器的仰冲状态结构示意图。
60.参见图5,一些实施例的水下航行器包括航行器壳体101、推进器103和舵部105。舵部105仅包括第一水平舵1051和第二水平舵1053。
61.在水下航行器的仰冲状态下,第一水平舵1051和第二水平舵1053靠近航行器壳体101的艉部的一端向航行器壳体101的顶部方向旋转。在水流的作用下,使航行器的艉部受到一个向下运动的力,航行器整体受到一个仰冲运动的扭矩,从而实现航行器的仰冲。
62.图6示出根据本技术一些实施例的水下航行器的俯冲状态结构示意图。
63.参见图6,一些实施例的水下航行器包括航行器壳体101、推进器103和舵部105。舵部105仅包括第一水平舵1051和第二水平舵1053。
64.在水下航行器的俯冲状态下,第一水平舵1051和第二水平舵1053靠近航行器壳体101的艉部的一端向航行器壳体101的底部方向旋转。在水流的作用下,使航行器的艉部受到一个向上运动的力,航行器整体受到一个俯冲运动的扭矩,从而实现航行器的俯冲。
65.图7a示出根据本技术一些实施例的水下航行器的左滚状态结构左视图。图7b示出根据本技术一些实施例的水下航行器的左滚状态结构右视图。图7c示出根据本技术一些实施例的水下航行器的左滚状态结构后视图。
66.参见图7a、7b、7c,一些实施例的水下航行器包括航行器壳体101、推进器103和舵部105。舵部105仅包括第一水平舵1051和第二水平舵1053。
67.在水下航行器的左滚运动过程中下,第一水平舵1051靠近航行器壳体101的艉部的一端向航行器壳体101的顶部方向旋转,第二水平舵1053靠近航行器壳体101的艉部的一端向航行器壳体101的底部方向旋转,以实现水下航行器的左滚。
68.图8a示出根据本技术一些实施例的水下航行器的右滚状态结构左视图。图8b示出根据本技术一些实施例的水下航行器的右滚状态结构右视图。图8c示出根据本技术一些实施例的水下航行器的右滚状态结构后视图。
69.参见图8a、8b、8c,一些实施例的水下航行器包括航行器壳体101、推进器103和舵部105。舵部105仅包括第一水平舵1051和第二水平舵1053。
70.在水下航行器的右滚运动过程中下,第一水平舵1051靠近航行器壳体101的艉部的一端向航行器壳体101的底部方向旋转,第二水平舵1053靠近航行器壳体101的艉部的一端向航行器壳体101的顶部方向旋转,以实现水下航行器的右滚。
71.图9示出根据本技术示例实施例的水下航行器的俯仰运动方法流程示意图。
72.参见图9,在s901,控制器发出俯仰运动指令。
73.在航行过程中,控制器接收外部指令,发出俯仰运动指令。
74.根据一些实施例,通讯装置接收来自外部的指俯仰运动令,并将信号传递给控制器,控制器根据接收到的指令,对水下航行器其他模块发出俯仰运动指令。
75.在s903,水下航行器仰冲。
76.控制器控制第一水平舵和第二水平舵靠近航行器壳体的艉部的一端向航行器壳体的顶部方向旋转,以实现水下航行器的仰冲。
77.根据一些实施例,接收来自控制器的俯仰运动指令,一方面,驱动器驱动第一水平舵,使第一水平舵的靠近航行器艉部的一端向航行器壳体的顶部方向旋转;另一方面,驱动器驱动第二水平舵,使第二水平舵的靠近航行器艉部的一端向航行器壳体的顶部方向旋转。在水流的作用下,使航行器的艉部受到一个向下运动的力,航行器整体受到一个仰冲运动的扭矩,从而实现航行器的仰冲。
78.根据一些实施例,可以通过闭环控制算法调节舵角的大小,进而调节扭矩的大小,从而实现水下航行器的仰冲角度控制。
79.在s905,水下航行器俯冲。
80.控制器控制第一水平舵和第二水平舵靠近航行器壳体的艉部的一端向航行器壳体的底部方向旋转,以实现水下航行器的俯冲。
81.根据一些实施例,接收来自控制器的俯仰运动指令,一方面,驱动器驱动第一水平舵,使第一水平舵的靠近航行器艉部的一端向航行器壳体的底部方向旋转;另一方面,驱动器驱动第二水平舵,使第二水平舵的靠近航行器艉部的一端向航行器壳体的底部方向旋转。在水流的作用下,使航行器的艉部受到一个向上运动的力,航行器整体受到一个俯冲运动的扭矩,从而实现航行器的俯冲。
82.根据一些实施例,可以通过闭环控制算法调节舵角的大小,进而调节扭矩的大小,从而实现水下航行器的俯冲角度控制。
83.根据一些实施例,本技术的第一水平舵和第二水平舵仅针对实施例中的命名以及定位,本技术不限于实施例中的水平舵具体安装位置。
84.图10示出根据本技术示例实施例的水下航行器的横滚运动方法流程示意图。
85.参见图10,在s1001,控制器发出横滚运动指令。
86.在航行过程中,控制器接收外部指令,发出横滚运动指令。
87.根据一些实施例,通讯装置接收来自外部的指俯仰运动令,并将信号传递给控制器,控制器根据接收到的指令,对水下航行器其他模块发出横滚运动指令。
88.在s1003,水下航行器左滚。
89.控制器控制第一水平舵靠近航行器壳体的艉部的一端向所述航行器壳体的顶部方向旋转,所述控制器控制第二水平舵靠近航行器壳体的艉部的一端向航行器壳体的底部方向旋转,以实现所述水下航行器的左滚。
90.根据一些实施例,接收来自控制器的横滚运动指令,一方面,驱动器驱动第一水平舵,使第一水平舵的靠近航行器艉部的一端向航行器壳体的顶部方向旋转;另一方面,驱动器驱动第二水平舵,使第二水平舵的靠近航行器艉部的一端向航行器壳体的底部方向旋转。在水流的作用下,使航行器的艉部受到向左翻滚的扭矩,从而实现航行器的左滚。
91.根据一些实施例,可以通过闭环控制算法调节舵角的大小,进而调节扭矩的大小,从而实现水下航行器的左滚角度控制。
92.在s1005,水下航行器右滚。
93.控制器控制第一水平舵靠近航行器壳体的艉部的一端向所述航行器壳体的底部方向旋转,所述控制器控制第二水平舵靠近航行器壳体的艉部的一端向航行器壳体的顶部方向旋转,以实现所述水下航行器的右滚。
94.根据一些实施例,接收来自控制器的横滚运动指令,一方面,驱动器驱动第一水平舵,使第一水平舵的靠近航行器艉部的一端向航行器壳体的底部方向旋转;另一方面,驱动器驱动第二水平舵,使第二水平舵的靠近航行器艉部的一端向航行器壳体的顶部方向旋转。在水流的作用下,使航行器的艉部受到向右翻滚的扭矩,从而实现航行器的左滚。
95.根据一些实施例,可以通过闭环控制算法调节舵角的大小,进而调节扭矩的大小,从而实现水下航行器的右滚角度控制。
96.以上对本技术实施例进行了详细描述和解释。应清楚地理解,本技术描述了如何形成和使用特定示例,但本技术不限于这些示例的任何细节。相反,基于本技术公开的内容的教导,这些原理能够应用于许多其它实施例。
97.通过对示例实施例的描述,本领域技术人员易于理解,根据本技术实施例的技术方案至少具有以下优点中的一个或多个。
98.根据本技术的示例实施例,水下航行器的舵部有且仅有两个水平舵,使得水下航行器在航行过程中受到的总阻力小,适于远距离航行。
99.根据本技术的示例实施例,通过水平舵实现水下航行器的俯仰运动及深度控制,通过水平舵的差动角度实现水下航行器的横滚运动,进而通过横滚与航向的耦合作用以及横滚姿态下水平舵在航向上产生的驱动力实现水下航行器的航向控制,从而实现水下航行器的空间运动能力。
100.根据本技术的一些实施例,水下航行器航行过程中,通过俯仰调节,在推进器推力作用下,水下航行器近似沿俯仰方向运动(水下航行器速度方向和俯仰姿态方向存在一个小的角度,即攻角),进而实现深度调节。通过闭环算法,调节水下航行器的俯仰角,从而实现深度控制。
101.根据本技术的一些实施例,水下航行器产生横滚运动后,双水平舵以当时舵角度为零点,转动正角度,双水平舵产生的俯仰扭矩,在横滚作用下可分解航向扭矩和俯仰扭矩。通过调节横滚角度的大小,可以调节航向扭矩和俯仰扭矩的分配关系,进而实现转向速度的大小。此时水下航行器进入螺旋转向运动,实现航向调节。
102.根据本技术的示例实施例,本技术的水下航行器通过控制器分别控制第一水平舵和第二水平舵的旋转和定位,远程实现水平舵实现水下航行器的俯仰运动及深度控制,通过水平舵的差动角度实现水下航行器的横滚运动,进而通过横滚与航向的耦合作用以及横滚姿态下水平舵在航向上产生的驱动力实现水下航行器的航向控制,从而实现水下航行器的空间运动能力。
103.根据本技术的一些实施例,本技术的水下航行器的控制器通过蓝绿激光通信、中微子通信和量子通信中的一种或多种与终端进行信号交互,实现水下航行器的超远距离实时通信,在本技术的水下航行器执行远距离航行作业的过程中,持续保持对水下航行器的控制。
104.以上具体地示出和描述了本技术的示例性实施例。应可理解的是,本技术不限于
这里描述的详细结构、设置方式或实现方法;相反,本技术意图涵盖包含在所附权利要求的精神和范围内的各种修改和等效设置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1