具有动力定位功能的航行器收放装置、回收及布放方法
1.本发明涉及海洋无人航行器领域,具体地,涉及一种具有动力定位功能的航行器收放装置、回收及布放方法。
背景技术:
2.近年以来,小型海洋航行器在海洋环境监测、海底地形扫描、海底线缆铺设、深海探测、极地探测等科考和工程领域的应用越来越广泛。通常所指的小型海洋航行器包括水面无人艇、uuv、rov、auv、arv乃至载人潜航器等等,因其所执行的任务不同而搭载不同的传感器,设计外形也因此各不相同,这给航行器的回收布放带来了很多困难。一般小型海洋航行器都是由母船(科考船、工程船等)携带至作业海域并释放,航行器在完成任务后返回母船周边并回收。海洋航行器回收布放的方式可以分为吊放式、滑道式和坞舱式等,后二者需改造母船自身结构,因此多见于军用航行器布放,绝大多数民用、科考航行器采用的都是吊放式。由于海上风、浪、流等环境因素影响,回收布放过程中航行器自身和母船都处在不断的摇晃运动当中,经常出现航行器脱落、碰撞船体的情况,甚至导致母船和航行器自身的损坏、航行器丢失等严重事件;对于多数水面无人艇、深海潜航器来说,回收布放过程中还需要登上航行器进行人工解挂钩,危险系数高。此外,一般海洋航行器搭载在母船的甲板上,受到母船自身六自由度运动的影响,航行器容易摇晃脱落导致损坏。
3.面对海洋航行器海上回收布放的困难,现有工程实践中除了选取海况较好的时间进行作业外,常见的应对策略还有在航行器顶部设置方便吊挂的结构、设计专用的起吊回收装置等。例如专利文献cn108482587a公开了一种无人艇回收布放系统及使用该系统进行无人艇回收的方法,该设计了一种锥形定位凸台和悬挂吊钩结构,通过锥形凸台结构和无人艇结构结合来实现定位,进而实现无人工辅助情况下吊钩的锁定,避免了人员登上无人艇固定吊索的危险操作。但是该方法针对特定设计的航行器,不具备普适性,且在海况恶劣情况下较难将吊钩准确吊入凸台中,实用性有限;再例如专利文献cn105711749b公开了一种无人水面航行器布放回收方法,同样设计了一种锥形吊锤,并在无人艇上布置了一种缆绳发射系统,实现无人工辅助的情况下固定无人艇和吊钩,但该技术在航行器和母船相对运动幅度大时存在锥形吊锤难以和无人船对位固定的问题;再例如专利文献cn113460274a公开了一种auv自主回收/布放装置及其实现方法,设计了一套机械爪结构用于替换母船原有的吊车,通过机械爪抓取auv(autonomous underwater vessel)实现回收和布放操作,但该技术实际上仍未解决回收过程中航行器和母船相对运动幅度大、难以捕捉的问题,且改装难度大、成本高;再例如专利文献cn105223960a公开了一种无人艇布放回收装置,主要通过设计一套多个伺服电机控制的吊放运动补偿装置,从而实现整个盒状无人艇布放结构在母船摇晃、波浪作用下的稳定,保证无人艇布放过程中的安全性。但是该技术采用的结构调节范围有限,且在装置入水受波浪影响、装置和吊车之间柔性连接的情况下运动补偿能力将下滑;再例如专利文献cn105905245b公开了一种用于水面无人艇布放回收的吊笼,吊笼设计有浮力箱结构,可自主漂浮,但该技术设计中吊笼不具备推进器装置及动力系统,因而
无自主定位与自航能力,海况较高时难以保证航行器进入吊笼中,且不能避免吊笼和航行器互相碰撞、甚至碰撞母船船体损坏的问题。专利文献cn107499460a同样设计了一种航行器回收吊笼,相比前一个吊笼增加了可远程操控的自动门结构,但也存在类似的问题。
4.综上各类现有海洋航行器回收布放装置和技术,主要存在的未解决的难题在于航行器和回收布放装置在回收布放过程中与母船之间的相对运动,因而无法进一步降低航行器回收布放过程的海况要求。同时,过于特殊化的装置设计又不具有广泛的适用性,通常只能用于特定设计的航行器。因此,面对复杂海况下不同种类海洋航行器的回收布放,亟需一种具有航速航向稳定控制能力、适用性广、易于操作的回收布放装置及其回收布放方法。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种具有动力定位功能的航行器收放装置、回收及布放方法。
6.根据本发明提供的一种具有动力定位功能的航行器收放装置,包括:
7.摇篮主体,包括船形本体,所述船形本体内部具有容纳空间,所述容纳空间用于停放航行器;
8.吊车,被配置在母船上并能够驱使所述船形本体在母船甲板和收放位置之间运动;
9.航行控制模块,信号连接所述吊车,能够采集船形本体的位置、姿态、运动信息以及船形本体与母船之间的相对位置信息并能够根据已设定的定位、伴航参数输出相应的控制信号使得航行器处在设定的位置进而实现所述航行器的回收和/或布放作业。
10.优选地,所述航行控制模块包括:
11.采集系统,用于采集船形本体自身位置、姿态、运动信息以及与母船相对位置信息;
12.监控系统,包括布置于船形本体上的无线通讯模块以及连接所述无线通讯模块并布置于母船上的上位工控机,所述上位工控机能够通过所述无线通讯模块实时收集所述采集系统的信息并能够设置所述摇篮主体和母船之间的相对稳定距离参数、航速航向参数;
13.控制系统,包括航行控制器、遥控器以及应急控制器,所述航行控制器能够根据已设定的定位、伴航参数输出相应的推进器控制信号进而能够使得航行器处在设定的位置;所述遥控器、应急控制器分别信号连接航行控制器;
14.执行系统,包括安装在所述船形本体上的推进器装置、引导装置以及压载装置,所述推进器装置能够改变所述船形本体的航速和姿态,所述压载装置通过压载水控制船形本体的吃水深度,所述引导装置布置在所述容纳空间端部并具有闭合状态和打开状态,当所述引导装置处于打开状态时,所述航行器能够进出所述容纳空间,当所述引导装置处于闭合状态时,不允许所述航行器进出所述容纳空间。
15.优选地,所述推进器装置包括多个艉部纵向推进器、艏部侧向推进器以及艉部纵向推进器、艏部侧向推进器各自对应的电子调速器,所述艉部纵向推进器能够提供船形本体纵向前进、纵向后退或转弯的动力,所述艏部侧向推进器能够提供横向运动或转弯的动力。
16.优选地,所述引导装置包括铰接在所述船形本体左右舷侧的两扇门、能够驱动所
述两扇门开合的引导门开关电机以及能够使得两扇门锁紧和解锁的液压销装置;
17.所述压载装置包括分别布置在所述船形本体艏部、艉部的多个压载水舱以及与每个所述压载水舱相连接的压载水泵。
18.优选地,具有如下任一种或任多种特征:
19.所述船形本体的内部沿自身长度方向布置有一排或多排舷侧弹性导向装置、一排或多排底部弹性导向装置,用于引导航行器的纵向运动和/或限制所述航行器横向运动;
20.所述船形本体的底部具有配合所述航行器自身结构的底部空槽以及能够可拆卸的固定在所述底部空槽上的摇篮底板;
21.所述船形本体上布置有一块或多块横向加强筋;
22.所述船形本体上具有多个吊耳;
23.所述船形本体底部具有多个航海固定孔,航海固定孔用于将船形本体锁定在母船上;
24.所述船形本体顶部具有标志小球或具有反光或带颜色的外壳;
25.所述船形本体采用金属外壳、金属桁架或浮力材料制作。
26.优选地,所述采集系统包括如下任一种或任多种部件:
27.传感器,布置于船形本体上并用于采集船形本体自身位置、姿态、运动信息以及与母船相对位置信息;
28.摄像头,布置于所述船形本体顶部;
29.双天线高精度gps;
30.加速度计模块;
31.激光雷达,布置于所述船形本体顶部;
32.深度计,布置于所述船形本体底部。
33.根据本发明提供的一种具有动力定位功能的航行器的回收方法,包括如下步骤:
34.步骤101,启动船形本体上的航行控制模块,根据所回收航行器的类型,选择是否打开船形本体所具有的底部空槽,使用吊索将母船上具有的吊车与船形本体相连,准备进行回收作业;
35.步骤102,通过吊车提升船形本体,控制母船上吊车转动将船形本体吊出舷外,待船形本体平稳后放入水中,在此过程中,保持船形本体重心与母船舷侧的距离大于l/2+d,其中,l为摇篮主体的纵向长度,d为安全间距;
36.步骤103,通过航行控制模块所具有的上位工控机输入航行器的目标位置信息,控制吊车继续释放吊车绳索,使船形本体完全依靠自身浮力漂浮在海面上,船形本体和吊车绳索之间的连接呈松弛状态且运动不受吊车绳索的约束,航行控制模块根据自身具有的采集系统获知的自身的位置和姿态信息,与目标位置、姿态信息对比并计算得到航行控制模块具有的执行系统上的推进器装置应分配的推力并最终转化为推进器装置的油门信号,控制推进器装置完成定位和/或伴航;
37.步骤104,通过遥控的方式打开所述执行系统所具有的引导装置并根据所回收航行器的吃水大小以及浮态,通过遥控的方式给出船形本体的吃水深度和重心调节信号,使得执行系统调整船形本体的吃水和浮态,使得目标回收航行器可驶入船形本体内部的容纳空间;
38.步骤105,目标航行器自主驶入,或通过手动操控航行器驶入容纳空间内部并控制关闭引导装置;
39.步骤106,通过吊车提升船形本体使得航行器和船形本体被一同提升离开水面并最终吊放至母船甲板上的预定存放位置;在起吊出水的过程中,若发现航行器和船形本体整体的重心发生偏移,无法实现平稳起吊,则应取消起吊并重新将船形本体和航行器放入海水中,并再次通过调节船形本体和航行器整体的重心,达到安全起吊的要求后再行起吊作业;
40.步骤107,将放置在预定存放位置的船形本体固定,关闭摇篮的航行控制模块,完成回收过程。
41.优选地,在执行步骤102时,通过上位工控机连接执行系统,输入航行器的目标位置信息:若母船处于海面锚泊的状态,则应设置航行器与母船的距离δx、航行器和母船1的相对航向角δθ;若母船具有一定航速,则还应设置母船航速v,使得航行器以相同的航速航向伴航,其中,母船的航速小于或等于船形本体自身航行的最大速度。
42.根据本发明提供的一种具有动力定位功能的航行器的布放方法,包括如下步骤:
43.步骤201,启动航行控制模块,将放置在母船甲板预定存放位置的船形本体解锁,将母船上吊车连接船形本体;
44.步骤202,控制吊车提升船形本体并转动吊车将载有航行器的船形本体吊出舷外后放入水中,吊装过程中保持船形本体重心与母船1舷侧的距离大于l/2+d,其中,l为摇篮主体的纵向长度,d为安全间距;
45.步骤203,通过航行控制模块所具有的上位工控机输入航行器的目标位置信息,控制吊车继续释放吊车绳索,使船形本体完全依靠自身浮力漂浮在海面上,船形本体和吊车绳索之间的连接呈松弛状态且运动不受吊车绳索的约束,航行控制模块根据自身具有的采集系统获知的自身的位置和姿态信息,与目标位置、姿态信息对比并计算得到航行控制模块具有的执行系统上的推进器装置应分配的推力并最终转化为推进器装置的油门信号,控制推进器装置完成定位和/或伴航;
46.步骤204,通过遥控的方式打开所述执行系统所具有的引导装置并根据所回收航行器的吃水大小以及浮态,通过遥控的方式给出船形本体的吃水深度和重心调节信号,使得执行系统调整船形本体的吃水和浮态,使得位于船形本体内部的航行器处于可完全自主航行的状态;
47.步骤205,通过遥控主动控制船形本体前进使得航行器从打开的引导装置被动退出船形本体;或操控航行器主动从打开的引导装置退出船形本体,待航行器完全离开船形本体后,再次遥控引导装置关闭并锁定;
48.步骤206,通过吊车提升船形本体使船形本体提升离开水面并最终吊放至母船甲板上的预定存放位置,在起吊出水的过程中,若发现船形本体的重心发生偏移,无法实现平稳起吊,则应取消起吊并重新将船形本体放入海水中,并再次通过遥控调节船形本体的重心,达到安全起吊的要求,随后再行起吊作业;
49.步骤207,将放置在预定存放位置的船形本体固定,关闭摇篮的航行控制模块,完成回收过程。
50.优选地,在上位工控机上输入航行器的目标位置信息,若母船1处于海面锚泊的状
态,则应设置船形本体与母船1的距离δx、船形本体和母船的相对航向角δθ;若母船具有一定航速,则还应设置母船航速v,使得航行器以相同的航速航向伴航,其中,母船的航速小于或等于船形本体自身航行的最大速度。
51.与现有技术相比,本发明具有如下的有益效果:
52.1、本发明通过采用具有动力定位功能的摇篮式收放装置,解决了一般海洋航行器在高海况下与母船相对运动剧烈、难以捕捉和回收布放的难题;同时摇篮式收放装置与母船起吊装置采用软连接方式,将二者运动解耦,避免了母船运动对收放装置带来不利影响。
53.2、本发明通过采用包括采集系统、监控系统、控制系统和执行系统的航行控制模块,可实现对装置位置、姿态、航速、吃水多个运动自由度的完全控制,进而自主完成动力定位、母船伴航和航行器回收布放引导等复杂操作,解决了以往海洋航行器回收过程中采用人工辅助解挂钩等低效率、高危险、高成本的问题,可实现在摇篮式收放装置对接过程中运动和姿态的自主稳定、保证高海况下的回收布放过程安全、高效进行。
54.3、本发明解决了海洋航行器与摇篮式收放装置对接过程中,摇篮式收放装置因环境影响(风、浪、流载荷)产生大幅平面运动,难以实现对接的问题。
55.4、本发明可在对接过程中使得摇篮式收放装置的平面位置相对稳定,进而通过操控航行器完成对接。
56.5、本发明通过采用可拆卸插槽式底部空槽结构以及大量防撞弹性导向装置的通用性设计,可适应带传感器艇体和无传感器艇体,适用绝大多数海上航行器的回收布放,并且避免了回收过程中自身乃至摇篮碰撞损坏,通用性好。
57.6、本发明通过采用航行固定装置设计,可将海洋无人装备与收放装置一同可靠固定在母船甲板上,解决了母船航行过程中六自由度运动导致海洋无人装备与收放装置滑移坠落的问题。
58.7、本发明通过采用双引导门的引导装置设计,限制了航行器在进出摇篮装置以及起吊过程中的运动范围,降低了航行器进出摇篮装置的难度,保障了回收布放的安全性。
59.8、本发明通过采用多组不同位置的压载水舱的压载装置设计,可实现摇篮装置自身吃水和重心位置的调整,适应不同吃水和浮态的航行器的回收布放,保证回收布放起吊过程中的安全性。
60.9、本发明通过采用浮式坞舱外形设计和多个动态位置控制推进器,在收放装置与母船运动解耦但不脱钩的情况下,实现收放装置高海况下的动态位置与姿态的稳定控制,保证高海况下高效、稳定地进行航行器的回收布放工作。
附图说明
61.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
62.图1为本发明的立体结构示意图,其中,引导装置处于闭合状态;
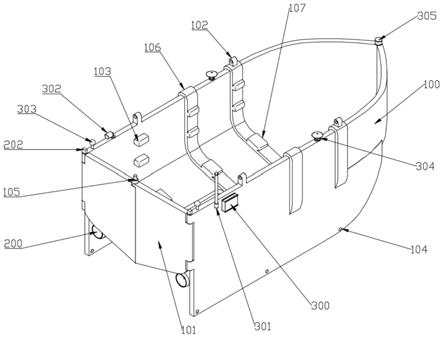
63.图2为本发明的立体结构示意图,其中,引导装置处于打开状态;
64.图3为发明的侧面结构示意图;
65.图4为本发明的结构俯视示意图,其中,摇篮底板未安装在船形本体上;
66.图5为本发明沿轴向方向的侧视示意图,其中,摇篮底板已安装在船形本体上;
67.图6为本发明中收放装置起吊过程示意图;
68.图7为本发明中收放装置起吊过程中吊索松弛时的结构示意图;
69.图8为本发明中航行器收放过程示意图;
70.图9为本发明中下方悬挂传感器的航行器的侧面示意图;
71.图10为本发明中收放装置动力定位示意图;
72.图11为本发明中航行控制模块组成的框式结构示意图。
73.图中示出:
74.1-母船
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
109-摇篮底板
75.2-吊车
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110-摇篮底板定位销
76.3-吊钩
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111-压载水舱
77.4-航行器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120-容纳空间
78.5-吊索
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200-艉部纵向推进器
79.100-船形本体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201-艏部侧向推进器
80.101-引导装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202-引导门开关电机
81.102-吊耳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300-航行控制器
82.103-舷侧弹性导向装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301-通讯天线
83.104-航行固定孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302-摄像头
84.105-液压销装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
303-标志小球
85.106-横向加强筋
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
304-gps天线
86.107-底部弹性导向装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
305-激光雷达
87.108-底部空槽
具体实施方式
88.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
89.实施例1:
90.本发明提供了一种具有动力定位功能的航行器收放装置,包括摇篮主体、吊车2以及航行控制模块,摇篮主体包括船形本体100,船形本体100内部具有容纳空间120,容纳空间120用于停放航行器,船形本体100的内部沿自身长度方向优选布置有一排或多排舷侧弹性导向装置103、一排或多排底部弹性导向装置107,用于引导航行器4从外部进入到容纳空间120时的纵向运动和/或限制航行器4在容纳空间120中时的横向运动。
91.吊车2被配置在母船1上并能够驱使船形本体100在母船甲板和收放位置之间运动,其中,船形本体100上优选具有多个吊耳102,以方便吊车2吊装时吊钩连接;航行控制模块信号连接吊车2,航行控制模块能够控制吊车2的运动,并能够采集船形本体100的位置、姿态、运动信息以及船形本体100与母船1之间的相对位置信息并能够根据已设定的定位、伴航参数输出相应的控制信号使得航行器4处在设定的位置进而实现航行器4的回收和/或布放作业。
92.如图11所示,航行控制模块包括采集系统、监控系统、控制系统以及执行系统,采集系统用于采集船形本体100自身位置、姿态、运动信息以及与母船1相对位置信息;监控系统包括布置于船形本体100上的无线通讯模块以及连接无线通讯模块并布置于母船1上的上位工控机,上位工控机能够通过无线通讯模块实时收集采集系统的信息并能够设置摇篮主体和母船1之间的相对稳定距离参数、航速航向参数;控制系统包括航行控制器300、遥控器以及应急控制器,航行控制器300能够根据已设定的定位、伴航参数输出相应的推进器控制信号进而能够使得航行器4处在设定的位置;遥控器、应急控制器分别信号连接航行控制器300,遥控器用于遥控控制航向控制器300,应急控制器用于在遥控器故障时的控制。
93.进一步地,执行系统包括安装在船形本体100上的推进器装置、引导装置101以及压载装置,推进器装置能够改变船形本体100的航速和姿态,压载装置通过压载水控制船形本体100的吃水深度,引导装置101布置在容纳空间120端部并具有闭合状态和打开状态,当引导装置101处于打开状态时,航行器4能够进出容纳空间120,当引导装置101处于闭合状态时,不允许航行器4进出容纳空间120。
94.推进器装置包括多个艉部纵向推进器200、艏部侧向推进器201以及艉部纵向推进器200、艏部侧向推进器201各自对应的电子调速器,艉部纵向推进器200能够提供船形本体100纵向前进、纵向后退或转弯的动力,艏部侧向推进器201能够提供横向运动或转弯的动力。
95.引导装置101包括铰接在船形本体100左右舷侧的两扇门、能够驱动两扇门开合的引导门开关电机202以及能够使得两扇门锁紧和解锁的液压销装置105;压载装置包括分别布置在船形本体100艏部、艉部的多个压载水舱111以及与每个压载水舱111相连接的压载水泵。
96.船形本体100的底部具有配合航行器4自身结构的底部空槽108以及能够可拆卸的固定在底部空槽108上的摇篮底板109,在对于航行器4下方悬挂传感器时可通过底部空槽108匹配,不影响航行器4在船形本体100中承载;船形本体100上布置有一块或多块横向加强筋106,能够在家船形本体100整体的强度。
97.船形本体100底部具有多个航海固定孔104,航海固定孔104用于当船形本体100放置在母船甲板上时锁定船形本体100。
98.具体地,采集系统包括传感器、摄像头302、双天线高精度gps304、加速度计模块、激光雷达305、深度计,传感器布置于船形本体100上并用于采集船形本体100自身位置、姿态、运动信息以及与母船1相对位置信息;摄像头302布置于船形本体100顶部;激光雷达305布置于船形本体100顶部;深度计布置于船形本体100底部。
99.本发明还提供了一种具有动力定位功能的航行器的回收方法,包括如下步骤:
100.步骤101,启动船形本体100上的航行控制模块,根据所回收航行器4的类型,选择是否打开船形本体100所具有的底部空槽108,使用吊索5将母船1上具有的吊车2与船形本体100相连,准备进行回收作业;
101.步骤102,通过吊车2提升船形本体100,控制母船1上吊车2转动将船形本体100吊出舷外,待船形本体100平稳后放入水中,在此过程中,保持船形本体100重心与母船1舷侧的距离大于l/2+d,其中,l为摇篮主体的纵向长度,d为安全间距,其中,在执行步骤102时,通过上位工控机连接执行系统,输入航行器4的目标位置信息:若母船1处于海面锚泊的状
态,则应设置航行器4与母船1的距离δx、航行器4和母船1的相对航向角δθ;若母船1具有一定航速,则还应设置母船1航速v,使得航行器4以相同的航速航向伴航,其中,母船1的航速小于或等于船形本体100自身航行的最大速度。
102.步骤103,通过航行控制模块所具有的上位工控机输入航行器4的目标位置信息,控制吊车2继续释放吊车绳索,使船形本体100完全依靠自身浮力漂浮在海面上,船形本体100和吊车绳索之间的连接呈松弛状态且运动不受吊车绳索的约束,航行控制模块根据自身具有的采集系统获知的自身的位置和姿态信息,与目标位置、姿态信息对比并计算得到航行控制模块具有的执行系统上的推进器装置应分配的推力并最终转化为推进器装置的油门信号,控制推进器装置完成定位和/或伴航;
103.步骤104,通过遥控的方式打开执行系统所具有的引导装置101并根据所回收航行器4的吃水大小以及浮态,通过遥控的方式给出船形本体100的吃水深度和重心调节信号,使得执行系统调整船形本体100的吃水和浮态,使得目标回收航行器4可驶入船形本体100内部的容纳空间120;
104.步骤105,目标航行器4自主驶入,或通过手动操控航行器4驶入容纳空间120内部并控制关闭引导装置101;
105.步骤106,通过吊车2提升船形本体100使得航行器4和船形本体100被一同提升离开水面并最终吊放至母船1甲板上的预定存放位置;在起吊出水的过程中,若发现航行器4和船形本体100整体的重心发生偏移,无法实现平稳起吊,则应取消起吊并重新将船形本体100和航行器4放入海水中,并再次通过调节船形本体100和航行器4整体的重心,达到安全起吊的要求后再行起吊作业;
106.步骤107,将放置在预定存放位置的船形本体100固定,关闭摇篮的航行控制模块,完成回收过程。
107.本发明还提供了一种具有动力定位功能的航行器的布放方法,包括如下步骤:
108.步骤201,启动航行控制模块,将放置在母船1甲板预定存放位置的船形本体100解锁,将母船1上吊车2连接船形本体100;
109.步骤202,控制吊车2提升船形本体100并转动吊车2将载有航行器4的船形本体100吊出舷外后放入水中,吊装过程中保持船形本体100重心与母船1舷侧的距离大于l/2+d,其中,l为摇篮主体的纵向长度,d为安全间距,其中,在实际操作中,在上位工控机上输入航行器4的目标位置信息,若母船1处于海面锚泊的状态,则应设置船形本体100与母船1的距离δx、船形本体100和母船1的相对航向角δθ;若母船1具有一定航速,则还应设置母船1航速v,使得航行器4以相同的航速航向伴航,其中,母船1的航速小于或等于船形本体100自身航行的最大速度。
110.步骤203,通过航行控制模块所具有的上位工控机输入航行器4的目标位置信息,控制吊车2继续释放吊车绳索,使船形本体100完全依靠自身浮力漂浮在海面上,船形本体100和吊车绳索之间的连接呈松弛状态且运动不受吊车绳索的约束,航行控制模块根据自身具有的采集系统获知的自身的位置和姿态信息,与目标位置、姿态信息对比并计算得到航行控制模块具有的执行系统上的推进器装置应分配的推力并最终转化为推进器装置的油门信号,控制推进器装置完成定位和/或伴航;
111.步骤204,通过遥控的方式打开执行系统所具有的引导装置101并根据所回收航行
器4的吃水大小以及浮态,通过遥控的方式给出船形本体100的吃水深度和重心调节信号,使得执行系统调整船形本体100的吃水和浮态,使得位于船形本体100内部的航行器4处于可完全自主航行的状态;
112.步骤205,通过遥控主动控制船形本体100前进使得航行器4从打开的引导装置101被动退出船形本体100;或操控航行器4主动从打开的引导装置101退出船形本体100,待航行器4完全离开船形本体100后,再次遥控引导装置101关闭并锁定;
113.步骤206,通过吊车2提升船形本体100使船形本体100提升离开水面并最终吊放至母船1甲板上的预定存放位置,在起吊出水的过程中,若发现船形本体100的重心发生偏移,无法实现平稳起吊,则应取消起吊并重新将船形本体100放入海水中,并再次通过遥控调节船形本体100的重心,达到安全起吊的要求,随后再行起吊作业;
114.步骤207,将放置在预定存放位置的船形本体100固定,关闭摇篮的航行控制模块,完成回收过程。
115.实施例2:
116.本实施例为实施例1的优选例。
117.本实施例中,摇篮主体包括船形本体100,如图1至图10所示,船形本体100的艏部具有流线型导流外形,艉部为方形,底部呈中部下凸两侧上凹的v形结构且v形结构朝上开口大于90
°
小于180
°
,优选大于120
°
,船形本体100内部形成容纳空间120,摇篮形的容纳空间120可供航行器4停放。
118.船形本体100可由金属外壳、金属桁架或其他浮力材料制作,强度应足以支撑所搭载航行器4自重以及抵抗一定程度的波浪;引导装置101布置于船形本体100的艉部,具有两扇门,分别与船形本体100的左右舷侧铰接,形成双扇门结构,如图1、图2分别处于引导装置101的闭合状态、打开状态;引导装置101在闭合状态时使用液压销装置105通过液压推出或收回定位销实现引导装置101的锁紧或解锁。
119.在船形本体100内部布置有多个舷侧弹性导向装置103和底部弹性导向装置107,均主要采用弹性材料构成,起到引导航行器进出船形本体100、并依靠自身具有的摩擦力防止航行器碰撞船形本体100内部舷侧和底部的作用;在船形本体100的顶面边缘处设置有4个或更多吊耳102,用于吊车缆绳固定;在船形本体100的后方下部开有方形底部空槽108,以适应不同航行器4下方悬挂布置的测量仪器,如图4、图8、图9所示;另有可装卸的摇篮底板109,可通过插槽的方式完全填充底部空槽108,如图4、图5所示,并采用摇篮底板定位销110使用螺栓固定,如此可根据所布放回收的航行器4类型选择是否打开底部空槽108。
120.船形本体100上布置有一或多块横向加强筋106,其布置于船形本体100的完整横截面(非底部空槽部位)外侧,对船形本体100的横截面进行加厚,起到加强装置横向强度的作用,用于弥补因底部空槽108带来的整体结构横向强度损失。
121.压载水舱111以完全嵌入的方式布置于船形本体100的内部,对船形本体100的外形不造成影响。压载水舱111布置有多个,多个压载水舱111分别位于船形本体100的艏部和艉部,如图3、图4所示,通过控制各个压载水舱111上的压载水泵泵入或泵出海水,可实现摇篮主体的吃水调整以及重心调整。航行固定孔104为船形本体100底部侧边开孔,摇篮主体停放在母船1甲板上时,可配合母船1上对应的销固装置,前后多个销轴插入对应航行固定孔104内,从而限制摇篮主体移动,如图5所示。
122.航行控制模块包括采集系统、监控系统、控制系统和执行系统。其中,采集系统包括布置于船形本体100各处用于采集摇篮主体自身位置、姿态、运动信息以及与母船1相对位置信息的各类传感器,包括布置于船形本体100顶部的摄像头302、双天线高精度gps304、加速度计模块imu、布置于顶部的激光雷达305以及布置于船形本体100底部的深度计等。
123.监控系统包括布置于船形本体100上的短距离无线通讯模块以及布置于母船1的上位工控机,无线通讯模块包括通讯天线301,母船1上的工作人员可通过短距离无线通讯模块实时收集记录和查看采集系统的各类传感器信息,并可以设置航行器收放摇篮主体和母船1之间的相对稳定距离、航速航向等参数。
124.控制系统包括收放摇篮主体的航行控制器300、遥控器和应急控制器,其中,航行控制器300主要根据工作人员已设定的定位、伴航参数,输出相应的推进器控制信号,使得航行器稳定在设定的位置(设定与母船1的距离δx,航速v,以及自身和母船1的相对航向角δθ)。遥控器则可以直接对航行器收放摇篮进行手动控制,包括其航行控制、压载控制和引导门开关控制;在航行控制器300失效时,应急控制器可接管代替航行控制器,其仅具有基础的手动控制功能,保证在紧急状况下航行器收放摇篮的回收。执行系统包括推进器装置、引导装置和压载装置,其中,推进器装置包括艉部纵向推进器200、艏部侧向推进器201以及艉部纵向推进器200、艏部侧向推进器201各自对应的电子调速器,艉部纵向推进器200可提供如图9所示y轴正负方向的动力fy,以及x-y平面内的转动力矩mxy,艏部侧向推进器201可提供x轴正负方向的动力fx和x-y平面内的转动力矩mxy,最少只需左右2个艏部纵向推进器200和1个艏部侧向推进器201即可实现摇篮的自主动力定位功能,本发明并不限于3个推进器的设计,加装更多的纵向和侧向推进器也可以同样实现定位功能,如图标注的3个推进器仅为本装置的一种实施案例。
125.进一步地,引导装置101包括液压销装置105和引导门开关电机202,其中引导门开关电机202位于引导装置101与船形本体100的铰接连接处,该引导门开关电机202的转动可带动引导门开关;压载装置包括压载水舱和压载水泵等通过压载水控制摇篮主体吃水深度的设备,主要根据遥控器给出的吃水深度信号控制摇篮主体各部位压载水舱的压载水泵泵入或泵出海水,从而调节摇篮主体的吃水和重心,举例来说,若欲增大摇篮主体的吃水,同时将摇篮主体重心往艉部方向移动,则应控制所有压载水舱的水泵都泵入海水,并且控制摇篮主体艉部压载水舱比艏部压载水舱泵入更多的海水,直至达到吃水和重心调节要求。
126.如图3、图4所示布置的四个压载水舱仅为本装置的一种实施案例,在装置艏部、艉部和舷侧布置更多的压载水舱也可以同样实现吃水和重心调整的功能;除此之外,在船形本体100顶部靠近引导装置101的位置,布置有标志小球303,标志小球303可根据要求采用反光或带有颜色的外壳,可供航行器4识别和定位。航行器4可通过机器视觉、光学识别等方式通过标志小球303获知本装置的实时位姿信息,从而实现自主驶入或驶出摇篮。本发明装置并不限制所布置的识别标志类型,实际应用过程中可根据所回收的航行器4的功能,将标志小球303替换为定位二维码或在装置表面大面积涂色,标志小球303的设计仅为本装置的一种实施案例。另外,航行控制模块的供电可根据实际使用需求采用船载锂电池供电或母船1电缆供电。
127.海洋航行器回收原理如下:
128.步骤101,启动海洋航行器收放摇篮主体上的航行控制模块;根据所回收的航行器
类型,选择是否打开摇篮底部空槽108;使用吊索5将母船1吊车的吊钩3与摇篮主体上的多个吊耳102相连,将摇篮主体底部的航海固定孔104上的固定销轴移除,完成解锁并准备进行回收作业。
129.步骤102,提升海洋航行器收放摇篮主体,母船1吊车2转动将装置吊出舷外,待装置不再晃动、相对稳定后缓慢放入水中。在此过程中,应保持摇篮主体重心与母船1舷侧的距离大于l/2+d,其中l为摇篮主体的纵向长度,d为安全间距(三级海况下d不小于0.2l,四级海况下d不小于0.3l)以此保证摇篮主体不会在吊放过程中碰撞母船1船体。
130.需要说明的是,在执行步骤102时,工作人员于母船1上通过上位工控机远程连接执行系统,输入海洋航行器的目标稳定位置信息:若母船1处于海面锚泊的状态,则应设置与母船1的距离δx、自身和母船1的相对航向角δθ;若母船1具有一定航速,则还应设置母船1航速v,使得航行器以相同的航速航向伴航。此时母船1的航速不可大于收放摇篮主体自身航行的最大速度,否则无法进行航行器回收布放作业。
131.步骤103,进一步释放吊车绳索,使得航行器收放摇篮主体完全依靠自身浮力漂浮在海面,此时吊钩3和航行器上的吊耳102之间的连接吊索呈松弛状态,但二者不脱钩,摇篮主体不受吊钩3运动的约束,航行器收放摇篮的运动与母船1运动解耦。启动摇篮主体动态位置主动控制系统,根据步骤103设置的目标稳定位置参数,航行控制模块根据自身具有的采集系统获知的自身的位置和姿态信息,与目标位置、姿态对比并计算得到各个推进器应分配的推力,执行系统则进一步将分配的推力转化为各推进器的油门信号,控制推进器完成定位或伴航。其中,两个艉部纵向推进器200均可提供纵向的推力fy,同时可通过左右两个推进器差速转动提供x-y平面内的扭矩mxy;艏部侧向推进器201可提供侧向推力fx,并且其在进行侧向推进时也会产生x-y平面内扭矩mxy。艉部纵向推进器200和艏部侧向推进器201互相配合,可在保持与母船1相同航速的同时保持自身与母船1在x-y平面相对位置的稳定,如图8、图9所示。
132.步骤104,工作人员通过遥控的方式打开液压销装置105,启动引导门开关电机,两扇引导门各自向外转动达到150
°
左右,呈喇叭状开口,方便接纳航行器进入摇篮主体,如图2所示。另外,根据所回收航行器的吃水大小以及浮态,通过遥控器给出摇篮主体的吃水深度和重心调节信号,使得各压载水泵泵入或泵出海水,进而调整摇篮主体的吃水和浮态,使得目标回收航行器可驶入摇篮主体内部的容纳空间120。
133.步骤105,目标航行器自主驶入,或通过手动操控航行器行驶至回收装置附近,等待回收命令。进一步地,航行器可通过识别位于摇篮主体上的标志小球303或其他识别标志(二维码等)获知两扇摇篮引导门的相对位置姿态信息,并将该信息实时发送至航行器控制系统,从而自主从两扇引导门中间驶入摇篮主体内部。在此过程中,引导装置101、舷侧弹性导向装置103和底部弹性导向装置107可在一定程度上限制航行器运动,保证航行器安全驶入摇篮主体。待航行器驶入摇篮主体之后,再次遥控启动引导门开关电机,关闭引导门,遥控锁紧液压销装置105。
134.步骤106,提升吊钩3,吊钩3和摇篮吊耳102之间的吊索再次拉紧,摇篮主体和海洋航行器被一同提升离开水面并最终吊放至母船1甲板上预定存放位置。在起吊出水的过程中,若发现航行器和摇篮主体整体的重心发生偏移,无法实现平稳起吊,则应取消起吊并重新将装置和航行器放入海水中,并再次通过遥控器调节各压载水舱111的压载,进而调整装
置和航行器整体的重心,达到安全起吊的要求,随后再行起吊作业。同时,摇篮主体上的舷侧弹性导向装置103和底部弹性导向装置107可防止内部的航行器在回收过程中由于摇晃撞击损坏自身或摇篮主体结构。
135.步骤107,重新将固定销轴插入摇篮航海固定孔104,完成航海固定。脱离吊钩3,关闭摇篮的航行控制模块,完成回收过程。
136.海洋航行器布放原理如下:
137.步骤201,启动海洋航行器收放摇篮主体上的航行控制模块;使用吊索5将母船1吊车的吊钩3与摇篮上的多个吊耳102相连,将摇篮底部的航海固定孔104上的固定销轴移除,完成解锁并准备进行回收作业。
138.步骤202,提升海洋航行器收放摇篮主体,母船1吊车2转动将装置吊出舷外,待装置不再晃动、相对稳定后缓慢放入水中。应保持摇篮主体重心与母船1舷侧的距离大于l/2+d,其中l为摇篮主体的纵向长度,d为安全间距(三级海况下d不小于0.2l,四级海况下d不小于0.3l),以此保证摇篮主体不会在吊放过程中碰撞母船1船体,其中,在执行步骤202时,工作人员于母船1上通过上位工控机远程连接执行系统,输入海洋航行器的目标位置信息,若母船1处于海面锚泊的状态,则应设置与母船1的距离δx、自身和母船1的相对航向角δθ;若母船1具有一定航速,则还应设置母船1航速v,使得航行器以相同的航速航向伴航。此时母船1的航速设置小于摇篮主体自身航行的最大速度,否则无法进行航行器回收布放作业。
139.步骤203,进一步释放吊车绳索,使得航行器收放摇篮主体完全依靠自身浮力漂浮在海面,此时吊钩3和航行器上的吊耳102之间的连接吊索呈松弛状态,但二者不脱钩,摇篮主体不受吊钩3运动的约束,航行器收放摇篮的运动与母船1运动解耦。启动摇篮主体动态位置主动控制系统,根据步骤103设置的目标稳定位置参数,航行控制模块根据其采集系统获知的自身的位置和姿态信息,与目标位置、姿态对比并计算得到各推进器应分配的推力,执行系统则进一步将分配的推力转化为各推进器的油门信号,控制推进器完成定位或伴航。其中两个艉部纵向推进器200均可提供纵向的推力fy,同时可通过左右两个艉部纵向推进器200差速转动提供x-y平面内的扭矩mxy;艏部侧向推进器201可提供侧向推力fx,并且其在进行侧向推进时也会产生x-y平面内扭矩mxy。艉部纵向推进器200和艏部侧向推进器201互相配合,可在保持与母船1相同航速的同时保持自身与母船1在x-y平面相对位置的稳定,如图8、图9所示。
140.步骤204,工作人员通过遥控打开液压销装置105,启动引导门开关电机202,两扇引导门各自向外转动打开至150
°
左右,呈喇叭状开口,打开的宽度应保证内部航行器可驶出。另外,根据所释放航行器的吃水大小以及浮态,通过遥控器给出摇篮主体的吃水深度和重心调节信号,使得各压载水泵泵入或泵出海水,进而调整摇篮的吃水和浮态,使得内部航行器处于可完全自主航行的状态。
141.步骤205,通过遥控主动控制摇篮主体前进,使得航行器从打开的引导装置101被动退出摇篮主体;或操控航行器主动从打开的引导装置101退出摇篮主体。待航行器完全离开摇篮主体之后,再次遥控启动引导门开关电机,关闭引导门,遥控锁紧液压销装置105。
142.步骤206,提升吊钩3,吊钩3和摇篮吊耳102之间的吊索5再次拉紧,摇篮主体被提升离开水面并最终吊放至母船1甲板上预定存放位置。在起吊出水的过程中,若发现摇篮主体的重心发生偏移,无法实现平稳起吊,则应取消起吊并重新将摇篮主体放入海水中,并再
次通过遥控器调节各压载水舱111的压载,进而调整摇篮主体的重心,达到安全起吊的要求,随后再行起吊作业。
143.步骤207,重新将固定销轴插入摇篮航海固定孔104,完成航海固定。脱离吊钩3,关闭摇篮的航行控制模块,完成回收过程。
144.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
145.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1