一种基于电磁产生器的避险机器鱼和避险方法
1.本发明属于水下仿生机器鱼技术领域,具体涉及一种基于电磁产生器的避险机器鱼和避险方法。
背景技术:
2.随着对海洋资源的不断开发,人们对海洋资源种类的检测效果和海洋开发环境的实时监测提出了更高要求。同时,随着对海洋的不断探索,海底环境呈现出更加多样化和复杂化,进而导致在水下仿生机器鱼的结构设计和功能实现也趋向于复杂化与多样化,成本也随之增加。
3.机器鱼通常设有动力装置、通讯装置和控制装置。通讯装置用于与用户进行信号连接,动力装置用于为机器鱼提供游动的动力,控制装置用于动力装置的控制。
4.申请人发现,传统的水下仿生机器鱼大部分采用固定重力装置来实现机器鱼在水下的浮力平衡,并没有考虑自身重力改变的智能化,这样就会导致水下仿生机器鱼在发生紧急情况下无法智能显现。其存在以下技术问题:
5.1、机器鱼刚度较差,容易受碰撞损坏;
6.2、机器鱼在水下巡游的摩擦阻力较大,能量利用率偏低;
7.3、在接收到用户指令后,机器鱼难以从水下迅速浮出水面来实现紧急避险;
8.4、当机器鱼无法接收到用户指令时无法从水下迅速浮出水面,经常会失去控制而失踪在水里,增加了人工搜寻和打捞成本。
技术实现要素:
9.针对现有技术中存在的技术问题,本发明的目的之一是:提供一种基于电磁产生器的避险机器鱼,在接收到用户指令或无法接收到用户指令时均能够迅速浮出水面来实现紧急避险。
10.针对现有技术中存在的技术问题,本发明的目的之二是:提供一种基于电磁产生器的避险机器鱼的避险方法。
11.本发明目的通过以下技术方案实现:
12.一种基于电磁产生器的避险机器鱼,包括机器鱼头部和电池;
13.机器鱼头部设有用于与外界信号连接的通讯装置、控制装置、电磁产生器和可磁性吸附的鱼鳞环;
14.电磁产生器连接于电池,用于产生电磁吸附力;
15.鱼鳞环通过电磁产生器产生的电磁吸附力吸附于机器鱼头部表面;
16.控制装置用于接收第一断电指令,并根据第一断电指令断开电池与电磁产生器的连接,以使鱼鳞环从机器鱼头部表面滑落;
17.所述第一断电指令由通讯装置接收外界信号获取,或者当通讯装置与外界通讯的间隔时长大于预设值时生成。
18.进一步,鱼鳞环设有多个,每个鱼鳞环包括多个紧密拼接的鱼鳞片,多个鱼鳞环间隔设于机器鱼头部。
19.进一步,电磁产生器包括多个感应线圈环,多个感应线圈环与多个鱼鳞环一一对应设置。
20.进一步,机器鱼头部设有屏蔽装置,电磁产生器设于屏蔽装置外。
21.进一步,屏蔽装置包括多个线圈挡板,多个线圈挡板与多个感应线圈环一一对应设置。
22.进一步,机器鱼头部下方设有容池器,电池安装于容池器内,机器鱼头部设有刚性固定电连接器,容池器对应设有分离脱落电连接器,容池器与机器鱼头部通过刚性固定电连接器与分离脱落电连接器之间的吸附力连接,控制装置根据第二断电指令断开刚性固定电连接器与分离脱落电连接器的连接;所述第二断电指令由通讯装置接收外界信号获取,或者当通讯装置与外界通讯的间隔时长大于预设值时生成。
23.进一步,刚性固定电连接器与分离脱落电连接器设有对应的啮合面,增加了刚性固定电连接器与分离脱落电连接器的电吸附接触面积,使得机器鱼巡游时容池器不会从机器鱼中脱落。
24.一种基于电磁产生器的避险机器鱼的避险方法,包括以下步骤,接收第一断电指令,根据第一断电指令断开电池与电磁产生器的连接,以使鱼鳞环从机器鱼头部表面滑落,降低机器鱼重量,机器鱼重心靠后且机器鱼头部朝上,从而使得机器鱼能够从水下迅速浮出水面来实现紧急避险;
25.所述第一断电指令由通讯装置接收外界信号获取,或者当通讯装置与外界通讯的间隔时长大于预设值时生成。
26.进一步,还包括以下步骤,接收第二断电指令,根据第二断电指令断开容池器与机器鱼头部的连接以降低机器鱼重量,从而使得机器鱼能够从水下迅速浮出水面来实现紧急避险;所述第二断电指令由通讯装置接收外界信号获取,或者当通讯装置与外界通讯的间隔时长大于预设值时生成。
27.进一步,第一断电指令优先于第二断电指令。
28.与现有技术相比,本发明具有以下优点及有益效果:
29.鱼鳞环通过电磁产生器产生的电磁吸附力吸附于机器鱼头部表面上,提高了机器鱼头部的刚度,使机器鱼头部不容易受碰撞损坏,鱼鳞环还降低了机器鱼头部在水下巡游的摩擦阻力,能量利用率高。遇到紧急情况时,用户可通过与机器鱼的通讯,下发第一断电指令给机器鱼的控制装置,使控制装置断开电池与电磁产生器的连接。如果机器鱼无法接收用户的第一断电指令,当计时器计算通讯装置与外界通讯的间隔时长超过预设值时,控制装置自动断开电池与电磁产生器的连接。电池与电磁产生器之间断开连接后,电磁产生器停止产生电磁吸附力,鱼鳞环失去电磁吸附力后会从机器鱼头部上滑落,降低了机器鱼头部重量,使得机器鱼重心靠后且机器鱼头部朝上,从而机器鱼能够通过动力系统从水下迅速浮出水面来实现紧急避险,节省了人工搜寻和打捞成本。
30.当机器鱼的动力系统出现故障时,机器鱼的控制装置根据第二断电指令断开容池器与机器鱼头部的连接,抛下容池器后更进一步减轻了机器鱼的重量,使得机器鱼受到的浮力大于此时机器鱼自身重量,机器鱼得以依靠浮力自动上浮来实现紧急避险。
31.第一断电指令优先于第二断电指令,在机器鱼动力系统无故障的情形下,只需抛下鱼鳞环便可实现迅速上浮紧急避险,可以保留容池器,减少了损失。
附图说明
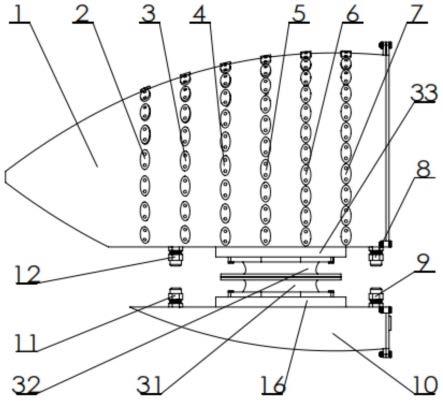
32.图1为本发明实施例的整体结构示意图。
33.图2为本发明实施例的电池组分离单元的结构示意图。
34.图3为本发明实施例的机器鱼头部的分解结构示意图。
35.图4为本发明实施例的刚性固定电连接器与分离脱落电连接器的结构示意图。
36.图5为本发明实施例的分离脱落电连接器的结构示意图。
37.图6为本发明实施例的电磁产生器的结构示意图。
38.图中,1-机器鱼头部;2-第一鱼鳞环;3-第二鱼鳞环;4-第三鱼鳞环;5-第四鱼鳞环;6-第五鱼鳞环;7-第六鱼鳞环;8-防水接头a;9-防水接头b;10-容池器;11-防水接头c;12-防水接头d;13-容池器盖板;14-充电孔;15-电池模块;16-分离脱落端安装座;17-分离脱落端密封圈安装槽;18-分离脱落端通线孔;19-分离脱落端安装孔;20-防水接头c连接孔;21-防水接头b连接孔;22-容池器盖板凸耳;23-头部盖板;24-头部盖板凸耳;25-第一线圈挡板;26-第二线圈挡板;27-第三线圈挡板;28-第四线圈挡板;29-第五线圈挡板;30-第六线圈挡板;31-分离脱落电连接器;32-刚性固定电连接器;33-刚性固定端安装座;34-刚性固定端密封圈安装槽;35-刚性固定端通线孔;36-刚性固定端安装孔;37-防水接头e;38-防水接头f;39-电连接器安装架;40-密封圈盖板;41-电连接器啮合面;42-防水接头连接孔;43-电连接器安装孔;44-第一感应线圈;45-第二感应线圈;46-第三感应线圈;47-第四感应线圈;48-衔铁条;49-第五感应线圈;50-第六感应线圈;51-第七感应线圈;52-第八感应线圈。
具体实施方式
39.下面结合实施例和附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
40.一种基于电磁产生器的避险机器鱼,在发生紧急情况时,电池组分离单元和鱼鳞片包络单元的紧急脱落可以调节机器鱼体整体重力和重心,从而使得机器鱼迅速浮出水面,实现机器鱼的水下紧急避险。
41.如图2、图4、图5所示,电池组分离单元包括容池器10、容池器盖板13、充电孔14、电池模块15、分离脱落端安装座16、分离脱落端密封圈安装槽17、分离脱落端通线孔18、分离脱落端安装孔19、防水接头c连接孔20、防水接头b连接孔21、容池器盖板凸耳22和分离脱落电连接器31,电池组分离单元安装在机器鱼头部1下方,容池器10内部有电池模块15,通过充电孔14对电池模块15进行循环充电,容池器盖板13与容池器10通过容池器盖板凸耳22密封连接,分离脱落电连接器31通过分离脱落端安装孔19、电连接器安装架39、电连接器安装孔43与分离脱落端安装座16固连,密封圈盖板40与分离脱落端密封圈安装槽17紧密贴合实现密封,防水接头f 38通过防水接头连接孔42固定于电连接器啮合面41上,电池模块15的引出线通过分离脱落端通线孔18穿过防水接头f 38,防水接头c11与防水接头c连接孔20固连,防水接头b 9与防水接头b连接孔21固连,刚性固定电连接器32位于机器鱼头部1正下
方,其通过刚性固定端安装孔36、电连接器安装架39、电连接器安装孔43与刚性固定端安装座33固连,密封圈盖板40与刚性固定端密封圈安装槽34紧密贴合实现密封,防水接头e 37通过防水接头连接孔42固定于电连接器啮合面41上,防水接头f 38的引出线通过防水接头e 37、刚性固定端通线孔35进入机器鱼头1内部。在发生紧急情况时,电池模块15停止工作,分离脱落电连接器31、刚性固定电连接器32的电连接器啮合面41脱离啮合,容池器10在自身重力作用下快速脱离机器鱼头部1,从而快速改变机器鱼整体重力和重心,使得机器鱼迅速浮出水面,实现机器鱼的水下紧急避险。
42.如图1所示,鱼鳞片包络单元包括多个均匀间隔包络在机器鱼头部1表面的鱼鳞环,本实施例中包括第一鱼鳞环2、第二鱼鳞环3、第三鱼鳞环4、第四鱼鳞环5、第五鱼鳞环6和第六鱼鳞环7。每个鱼鳞环包括多个紧密拼接的鱼鳞片。鱼鳞环能够增强机器鱼的刚度,尽量避免机器鱼受到碰撞而损伤,同时,鱼鳞环的仿生设计减轻了游动阻力,减少了机器鱼的运动能耗,提高了能量利用率。
43.如图6所示,电磁产生器包括多个与多个鱼鳞环一一对应设置的感应线圈环,本实施例中,每一个感应线圈环包括第一感应线圈44、第二感应线圈45、第三感应线圈46、第四感应线圈47、衔铁条48、第五感应线圈49、第六感应线圈50、第七感应线圈51和第八感应线圈52。
44.如图3所示,屏蔽装置包括多个与多个感应线圈环一一对应设置的线圈挡板,本实施例中包括第一线圈挡板25、第二线圈挡板26、第三线圈挡板27、第四线圈挡板28、第五线圈挡板29和第六线圈挡板30,均匀分布在机器鱼头1内部,将屏蔽感应线圈环对机器鱼头内部电子器件的影响。
45.机器鱼外部主体部分包括机器鱼头部1、头部盖板23和头部盖板凸耳24。机器鱼头部1与头部盖板23通过头部盖板凸耳24密封连接,刚性固定端安装座33位于机器鱼头部1的正下方,防水接头a8、防水接头d12将防水接头b、防水接头c11的引出线导入机器鱼内部,为感应线圈环提供能源,当机器鱼在水下正常巡游时,鱼鳞环在电磁吸附力的作用下紧紧贴合机器鱼头部1外侧,当发生紧急情况时,电池模块15停止工作,电磁产生器产生的电磁吸附力消失,鱼鳞环在自身重力作用下快速脱落,从而快速改变机器鱼整体重力和重心,使得机器鱼迅速浮出水面,实现机器鱼的水下紧急避险。
46.一种基于电磁产生器的避险机器鱼的避险方法,包括以下步骤,接收第一断电指令,根据第一断电指令断开电池与电磁产生器的连接,以使鱼鳞环从机器鱼头部1表面滑落,降低机器鱼重量,机器鱼重心靠后且机器鱼头部1朝上,从而使得机器鱼能够从水下迅速浮出水面来实现紧急避险;
47.所述第一断电指令由通讯装置接收外界信号获取,或者当通讯装置与外界通讯的间隔时长大于预设值时生成。
48.进一步,还包括以下步骤,接收第二断电指令,根据第二断电指令断开容池器10与机器鱼头部1的连接以降低机器鱼重量,从而使得机器鱼能够从水下迅速浮出水面来实现紧急避险;所述第二断电指令由通讯装置接收外界信号获取,或者当通讯装置与外界通讯的间隔时长大于预设值时生成。
49.进一步,第一断电指令优先于第二断电指令。
50.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的
限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1