一种AUV水下对接回收平台的制作方法
本发明涉及水下航行器的,特别是涉及一种auv水下对接回收平台。
背景技术:
1、无人水下航行器作为智能装备代替人在复杂水下环境开展作业的典型代表,有着非常广泛和重要的民用和军事用途。根据工作模式不同,无人水下航行器一般分为自主式(auv)和遥控式(rov)两类。auv自身携带能源,以巡航方式自主独立工作,可自主完成水下结构检测、水中运载、远程探测等任务。由于auv自带能源有限,auv水下长航时工作需要解决能源不足时的补济问题。当前,常用的打捞出水后进行能源补充方法非常费时费力,基于水下移动母船、水底预置坞站等水下动/静平台来实现auv的对接回收和充电维护是一种较好的解决方法。然而由于水下载荷环境、水声通讯和定位误差、auv导航和识别智能化水平等多种因素综合影响,auv水下对接回收难度大、成功率普遍较低。
2、授权公告号为cn110803269b的中国发明专利公开了一种液压联动装置驱动的超大型uuv释放与回收auv装置,包括回收装置,回收装置为一端封闭的框架式筒状结构,另一端为供auv进出的回收/释放口,框架式筒状结构的前端固定有若干个弹性橡胶板,各弹性橡胶板通过弹性紧箍圈连接形成一个筒状结构,通过无弹性牵引绳能够拉动各弹性橡胶板相背活动,从而形成扩口结构,以引导auv进入,待auv进入后松开无弹性牵引绳,使各弹性橡胶板相向活动以进行收口。框架式筒状结构的内部固定有环状auv定位圈,环状auv定位圈为弹性材质,当auv进入后通过摩擦和弹性变形对其进行定位。其中,回收装置以及前端的弹性橡胶板、弹性紧箍圈一起形成了引导结构,引导auv进入,而回收/释放口实际上形成供auv进入的前端进口。
3、上述回收装置在回收auv的过程中,auv进入水平段后是通过具有弹性的auv环状定位圈发生摩擦、形变对auv进行定位,即要求auv环状定位圈的内径必须小于auv的外径。当auv的外径小于auv环状定位圈的内径时则无法完成回收,同时,若auv的外周形状不规则(比如有凸出的部分等)时,auv也无法进入引导结构中完成回收。
技术实现思路
1、本发明的目的在于提供一种auv水下对接回收平台,用以解决现有auv回收装置对待回收的auv的尺寸、外形要求较高而导致适用范围较窄的技术问题。
2、本发明的auv水下对接回收平台的技术方案是:
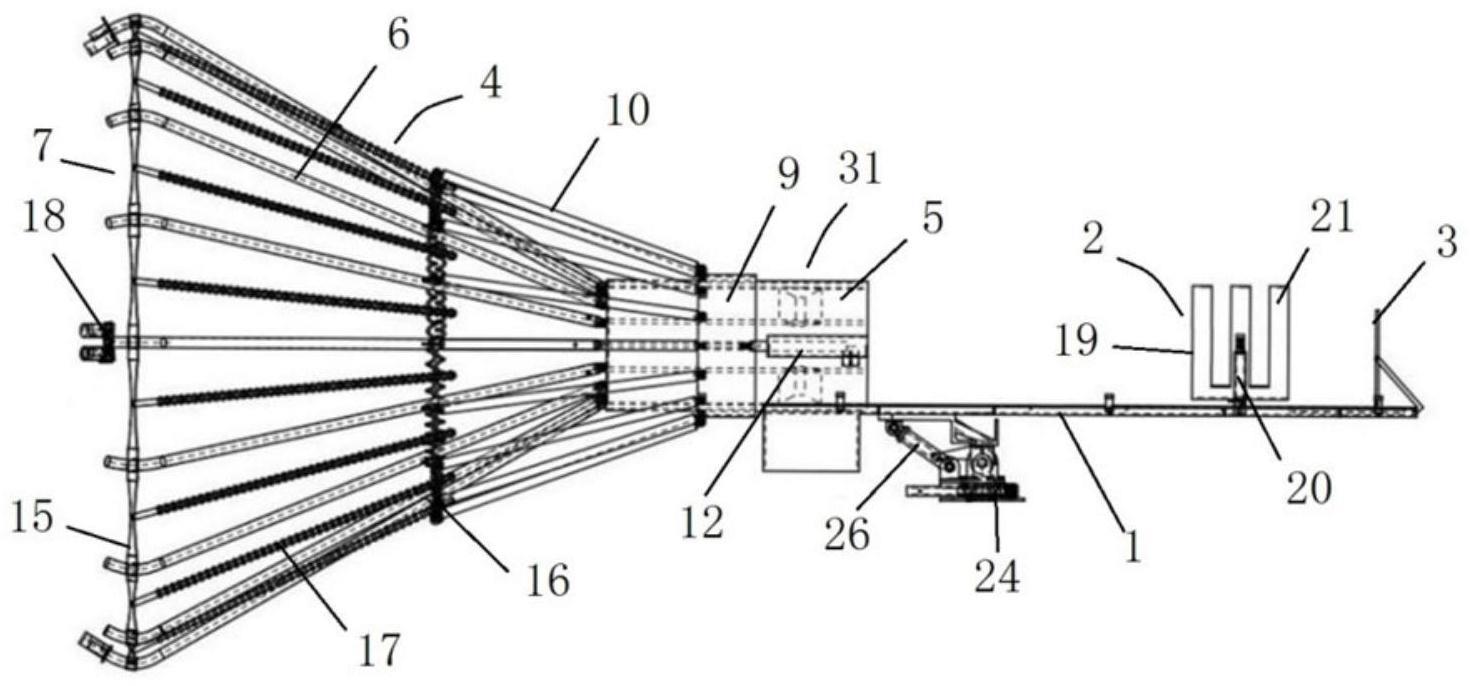
3、auv水下对接回收平台包括引导结构,引导结构具有供auv进入的前端进口,所述前端进口在使用时为扩口结构;auv水下对接回收平台包括支撑平台,所述引导结构固设于该支撑平台上,所述引导结构前后贯通,引导结构内具有供auv的一端穿入并向后穿出的通道,auv水下对接回收平台还包括设于支撑平台上且位于引导结构后方的夹紧装置,夹紧装置包括夹紧臂以及驱动夹紧臂动作的夹紧臂驱动机构,夹紧臂驱动机构用于在auv的相应端穿至夹紧臂处时驱动夹紧臂动作以夹紧固定auv的相应端。
4、有益效果:本发明的auv水下对接回收平台回收auv时,auv通过前端进口进入引导结构,auv向后穿出引导结构内部的通道后并移动至夹紧臂处时,夹紧臂驱动机构驱动夹紧臂动作以将auv进行夹紧定位。auv的固定是依靠引导结构后方的夹紧装置来实现的,引导结构仅起到对auv进行引导的作用,实际设计时,引导结构的通道可以设计的更大,以便使auv穿过,使得各种尺寸、外形的auv均可以通过,进而使得本发明的适用范围更广。
5、进一步地,所述夹紧臂包括左右间隔排布的两个抱爪,两抱爪均铰接在支撑平台上,所述夹紧臂驱动机构用于驱动两抱爪相向摆动以夹紧auv。
6、有益效果:通过两个抱爪相向摆动将auv夹紧,对auv的夹紧效果更好。
7、进一步地,所述抱爪具有至少两个手指,同一抱爪中的各手指前后间隔设置,并且相对设置的两抱爪夹紧auv时,两抱爪的手指依次交错排布。
8、有益效果:抱爪通过模拟人手的构造来对auv进行夹紧,手指的端部在使用时可以位于auv的上方,夹紧效果更好。
9、进一步地,auv水下对接回收平台还包括位于夹紧装置后侧的挡止结构,挡止结构用于与auv挡止配合,所述夹紧装置在auv与挡止结构挡止后将auv夹紧。
10、有益效果:采用挡止结构对auv的位置进行挡止定位,能够对auv进行降速并使夹紧装置可以顺利地对auv进行夹紧。
11、进一步地,auv水下对接回收平台包括安装基座,所述支撑平台绕上下延伸的轴线转动布置在安装基座上,auv水下对接回收平台包括驱动支撑平台绕上下延伸的轴线回转调整的回转驱动机构。
12、有益效果:当auv没有对准引导结构的前端进口时,通过驱动回转驱动机构动作支撑平台转动,以使引导结构的前端进口对准auv,能够更加顺利地对auv进行回收。
13、进一步地,所述引导结构为伞状引导结构,伞状引导结构的前端进口能够外张以形成扩口结构,也能够内收合拢;auv水下对接回收平台包括安装基座,所述支撑平台绕左右延伸的轴线摆动布置在安装基座上,auv水下对接回收平台包括驱动支撑平台绕左右延伸的轴线俯仰摆动的俯仰驱动机构。
14、有益效果:引导结构的前端进口外张形成扩口结构时,前端进口的开口较大以便于auv的进入,支撑平台摆动布置在安装基座上,在俯仰驱动机构的驱动下支撑平台能够上下摆动,即auv在回收成功后能够由水平状态调整至竖直状态,以便于在引导结构的前端进口合拢后将auv回收至水下母船的上下延伸的回收筒中。
15、进一步地,所述引导结构包括固设于支撑平台上的固定套筒,固定套筒的前端铰接有多个导向杆,各导向杆沿固定套筒的周向间隔均布,各导向杆的前端配合形成所述前端进口,引导结构还包括用于驱动各导向杆相互靠拢以实现收口以及相互远离以形成扩口结构的导向杆驱动机构。
16、有益效果:固定套筒的前端铰接有导向杆,各导向杆的前端进口能够收口以及形成扩口结构,使得引导机构的前端进口能够灵活调节,便于对auv进行回收。导向杆为刚性结构,不会因auv的撞击而发生变形。
17、进一步地,导向杆驱动机构包括沿前后方向导向套装在固定套筒外部的滑动套筒,滑动套筒前端与各导向杆之间均铰接装配有推杆,通过滑动套筒的向前移动能够驱动各导向杆相互靠拢,向后移动能够驱动各导向杆相互远离,导向杆驱动机构还包括驱动滑动套筒前后移动的驱动件。
18、有益效果:采用滑动套筒与推杆配合驱动导向杆的扩张与靠拢,结构简单,安装方便。
19、进一步地,引导结构还包括连接各导向杆的弹性件。
20、有益效果:弹性件能够整体上增强引导结构的结构强度,即增强了引导结构的承载能力。
21、进一步地,所述弹性件包括设于导向杆前端的第一弹性件,以及位于第一弹性件后方的第二弹性件,第一弹性件、第二弹性件之间连接有加密杆,加密杆位于任意相邻两导向杆之间。
22、有益效果:加密杆的设置能够减小导向杆之间的间隔缝隙,有效防止auv出现卡滞于各导向杆间隔中的现象。
- 还没有人留言评论。精彩留言会获得点赞!