一种声呐单轴稳定装置的制作方法
1.本发明涉及船上设备领域,尤其涉及一种声呐单轴稳定装置。
背景技术:
2.声呐是利用水中声波对水下目标进行探测、定位和通信的电子设备,现有技术中,通常将声呐固定安装在船底,相比于拖曳式连接具有更高的稳定性以及安全性,但是船体受风浪的影响会出现摇摆现象,使得固定安装在船底的声呐跟随船体一同翘摆,从而导致声呐成像模糊,而现有设备只能从竖向对声呐进行位置调整,从而只能使声呐在竖直方向保持平稳,而在水面上的船体往往同时会出现竖向摇摆和横向摇摆的现象,当船体横向摇摆幅度较大时,仍会造成声呐成像模糊的问题。
技术实现要素:
3.为了克服现有设备只能从竖向对声呐进行位置调整,调整后仍会导致声呐成像模糊的缺点,本发明提供一种声呐单轴稳定装置。
4.技术方案:一种声呐单轴稳定装置,包括有顶板、舱体、声呐件、万向球、花键轴、密封环、调节组件和加固组件;顶板下侧固接有舱体;舱体上连接有调节组件;调节组件下侧连接有声呐件;调节组件右侧连接有万向球;调节组件上侧连接有花键轴;通过调节组件、万向球和花键轴相配合对声呐件的位置进行实时调整;通过花键轴转动对声呐件进行竖向位置调整,通过花键轴移动对声呐件进行横向位置调整;花键轴外侧等距套设有四个密封环,四个密封环均与调节组件相连接;密封环轮廓形状与花键轴截面轮廓形状相同;通过四个密封环对调节组件与滑动中的花键轴进行多重密封;调节组件下侧左部连接有用于对声呐件进行调节式加固的加固组件;加固组件与声呐件相接触。
5.此外,特别优选的是,调节组件包括有第一连接块、第一连接杆、第一联动块、联动板、第一锁环、第二锁环、水平传感器、第二联动块、第一圆杆、第一圆盘、滑动块、转轴短杆、第四联动块、伸缩单元、防水单元、防护单元和驱动单元;舱体前侧右部固接有第一连接块;第一连接块内部固接有第一连接杆;第一连接杆下端与万向球焊接;万向球下侧转动连接有第一联动块;第一联动块下侧固接有联动板;联动板下侧左部和下侧右部均焊接有一个第一锁环;两个第一锁环下侧均固接有一个第二锁环;声呐件固定于两个第一锁环和两个第二锁环之间;联动板上侧中部固接有水平传感器;联动板左部转动连接有第二联动块;第二联动块上侧滑动连接有滑动块;滑动块上侧转动连接有转轴短杆;转轴短杆上侧转动连接有第四联动块;第四联动块上侧转动连接有第一圆杆;第一圆杆后端焊接有第一圆盘;第一圆盘中部与花键轴固接;舱体内侧左部连接有伸缩单元;舱体前侧左部连接有防水单元;第一连接杆右侧连接有防护单元;舱体内侧左部连接有驱动单元,并且驱动单元位于伸缩单元右方。
6.此外,特别优选的是,伸缩单元包括有伸缩气缸和第三联动块;舱体内侧左部固接有伸缩气缸;伸缩气缸的伸缩端固接有第三联动块;第三联动块与花键轴转动连接。
7.此外,特别优选的是,防水单元包括有套筒、支撑环、第一管道、第二管道、第二圆盘和第三管道;舱体前侧左部转动连接有套筒;套筒内侧前部和内侧后部均焊接有一个支撑环;花键轴在两个套筒内侧之间滑动;四个密封环卡设于套筒内侧;支撑环与相邻的密封环相接触;套筒内侧固接有若干个第二管道;每个第二管道朝向套筒中心的方向均连通有三个第一管道,且每个第一管道均位于相邻的两个密封环之间;第二管道后端穿过套筒;第二管道为倾斜设置,并且第二管道后部与花键轴中心线的距离大于第二管道前部与花键轴中心线的距离;舱体内壁前侧焊接有第二圆盘;第二圆盘与套筒转动连接;第二圆盘中部贯穿设置有第三管道;第三管道上端穿出舱体。
8.此外,特别优选的是,防护单元包括有第二连接杆、折弯板、第一导热板和第二导热板;第一连接杆上固接有两个第二连接杆;两个第二连接杆之间焊接有一个折弯板,并且折弯板位于第一连接杆右方;折弯板左侧上部焊接有第一导热板;第一导热板后部贯穿于舱体内侧;第一导热板后部焊接有若干个第二导热板。
9.此外,特别优选的是,调节组件还包括有导流块和导流环;第四联动块右侧焊接有导流块;第一圆盘外侧焊接有导流环。
10.此外,特别优选的是,加固组件包括有第二连接块、第二圆杆、第五联动块、弹簧、固定块、第六联动块、限位块和限位环;位于左方的第一锁环上焊接有两个第二连接块;位于左方的第二锁环下侧中部焊接有另一个第二连接块;三个第二连接块远离声呐件中心的一侧均焊接有两个第二圆杆;每相邻两个第二圆杆之间均滑动连接有一个第五联动块;六个第二圆杆上均套设有一个弹簧,弹簧的一端与相邻的第二连接块焊接,弹簧的另一端与相邻的第五联动块焊接;三个第五联动块朝向声呐件中心的一侧均焊接有一个固定块;三个第二连接块内部均滑动连接有一个第六联动块,每个第六联动块均与相邻的固定块配合;固定块远离相邻的第五联动块的一侧设置有若干个倒扣,第六联动块与固定块相接触面设置有若干个倒扣;三个第六联动块左端之间固接有一个限位块;限位块右侧与声呐件相接触;声呐件外侧左部焊接有限位环,限位环与位于左方的第一锁环内侧面相接触,限位环与位于左方的第二锁环内侧面相接触。
11.此外,特别优选的是,花键轴、套筒和四个密封环之间形成有三个第一空腔,第一空腔与相邻的第一管道相连通。
12.此外,特别优选的是,舱体、套筒和第二圆盘之间形成有第二空腔,若干个第二管道均与第二空腔相连通。
13.此外,特别优选的是,折弯板呈v形,并且折弯板尖角方向朝右,折弯板右侧面设置有褶皱。
14.本发明具有如下优点:使用时通过同一个花键轴对声呐件的横向位置和竖向位置进行实时调整,使得声呐件的位置保持稳定,从而大大提高了声呐件的成像效果,避免了现有设备从单一方向对声呐件的位置调整后仍出现成像模糊的问题,通过三个密封环同时对平滑移动的花键轴进行密封,将渗入的清水占存在第一空腔中,避免清水渗透至舱体中,从而避免舱体中的电气元件遇水出现短路现象,花键轴转动时,占存在第一空腔中清水离心流入至第二管道中,通过第二管道的特殊倾斜设置,使得清水在离心流入至第二空腔中,从而及时将第一空腔清水排出,进一步提高密封效果;船体行驶过程中,通过导流块、导流环和折弯板对水流进行导向,降低船体行驶阻
力,同时避免因水流冲击而导致用于调节声呐件的活动部件出现松散的现象,从而避免长时间使用后调节精度下降的问题,折弯板作为导流件和清水紧密接触,还用于换热,对伸缩气缸和电机进行高效散热;通过限位块和限位环避免船体在水面上行驶过程中声呐件因惯性或者水流阻力出现偏移现象,进而避免影响对声呐件位置调整的精度,根据限位环的位置可对限位块的位置进行调节,避免因限位环焊接在声呐件出现偏移而导致限位块无法贴合声呐件左侧的现象。
附图说明
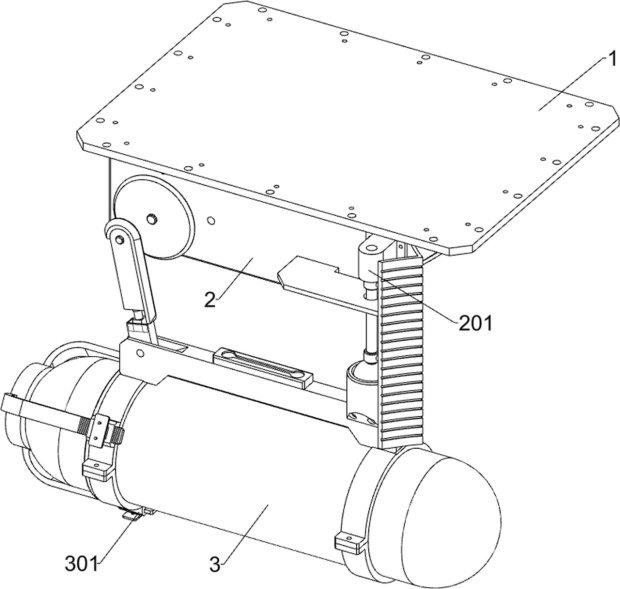
15.图1是本发明声呐单轴稳定装置的第一种结构示意图;图2是本发明声呐单轴稳定装置的第二种结构示意图;图3是本发明调节组件的结构示意图;图4是本发明调节组件的第一种部分结构示意图;图5是本发明调节组件的第二种部分结构示意图;图6是本发明调节组件部分结构的左视图;图7是本发明调节组件的第三种部分结构示意图;图8是本发明调节组件的第四种部分结构示意图;图9是本发明加固组件的结构示意图;图10是本发明加固组件的部分结构示意图。
16.在图中:1-顶板,2-舱体,3-声呐件,201-第一连接块,202-第一连接杆,203-万向球,204-第一联动块,205-联动板,206-第一锁环,207-第二锁环,208-水平传感器,209-第二联动块,2010-第一圆杆,2011-第一圆盘,2012-伸缩气缸,2013-第三联动块,2014-花键轴,2015-套筒,2016-支撑环,2017-密封环,2018-第一管道,2019-第二管道,2020-第二圆盘,2021-第三管道,2022-第二连接杆,2023-折弯板,2024-第一导热板,2025-第二导热板,2026-电机,2027-柱齿轮,2028-直齿轮,2029-导流块,2030-导流环,2031-滑动块,2032-转轴短杆,2033-第四联动块,301-第二连接块,302-第二圆杆,303-第五联动块,304-弹簧,305-固定块,306-第六联动块,307-限位块,308-限位环,91-第一空腔,92-第二空腔。
具体实施方式
17.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。仅此声明,本发明在文中出现或即将出现的上、下、左、右、前、后、内、外等方位用词,仅以本发明的附图为基准,其并不是对本发明的具体限定。
18.实施例1一种声呐单轴稳定装置,如图1-8所示,包括有顶板1、舱体2、声呐件3、万向球203、花键轴2014、密封环2017、调节组件和加固组件;顶板1下侧螺栓连接有舱体2;舱体2上连接有调节组件;调节组件下侧连接有声呐件3;调节组件右侧连接有万向球203;调节组件上侧连接有花键轴2014;花键轴2014外侧等距套设有四个密封环2017,四个密封环2017均与调节组件相连接;密封环2017轮廓形状与花键轴2014截面轮廓形状相同;调节组件下侧左部连接有加固组件;加固组件与声呐件3相接触。
19.调节组件包括有第一连接块201、第一连接杆202、第一联动块204、联动板205、第一锁环206、第二锁环207、水平传感器208、第二联动块209、第一圆杆2010、第一圆盘2011、滑动块2031、转轴短杆2032、第四联动块2033、伸缩单元、防水单元、防护单元和驱动单元;舱体2前侧右部螺栓连接有第一连接块201;第一连接块201内部固接有第一连接杆202;第一连接杆202下端与万向球203焊接;万向球203下侧转动连接有第一联动块204;第一联动块204下侧螺栓连接有联动板205;联动板205下侧左部和下侧右部均焊接有一个第一锁环206;两个第一锁环206下侧均螺栓连接有一个第二锁环207;声呐件3固定于两个第一锁环206和两个第二锁环207之间;联动板205上侧中部固接有水平传感器208;联动板205左部转动连接有第二联动块209;第二联动块209上侧滑动连接有滑动块2031;滑动块2031上侧转动连接有转轴短杆2032;转轴短杆2032上侧转动连接有第四联动块2033;第四联动块2033上侧转动连接有第一圆杆2010;第一圆杆2010后端焊接有第一圆盘2011;第一圆盘2011中部与花键轴2014固接;舱体2内侧左部连接有伸缩单元;舱体2前侧左部连接有防水单元;第一连接杆202右侧连接有防护单元;舱体2内侧左部连接有驱动单元,并且驱动单元位于伸缩单元右方。
20.伸缩单元包括有伸缩气缸2012和第三联动块2013;舱体2内侧左部螺栓连接有伸缩气缸2012;伸缩气缸2012的伸缩端固接有第三联动块2013;第三联动块2013与花键轴2014转动连接。
21.防水单元包括有套筒2015、支撑环2016、第一管道2018、第二管道2019、第二圆盘2020和第三管道2021;舱体2前侧左部转动连接有套筒2015;套筒2015内侧前部和内侧后部均焊接有一个支撑环2016;花键轴2014在两个套筒2015内侧之间滑动;四个密封环2017卡设于套筒2015内侧;支撑环2016与相邻的密封环2017相接触;套筒2015内侧固接有若干个第二管道2019;每个第二管道2019朝向套筒2015中心的方向均连通有三个第一管道2018,且每个第一管道2018均位于相邻的两个密封环2017之间;第二管道2019后端穿过套筒2015;第二管道2019为倾斜设置,并且第二管道2019后部与花键轴2014中心线的距离大于第二管道2019前部与花键轴2014中心线的距离;舱体2内壁前侧焊接有第二圆盘2020;第二圆盘2020与套筒2015转动连接;第二圆盘2020中部贯穿设置有第三管道2021;第三管道2021上端穿出舱体2。
22.防护单元包括有第二连接杆2022、折弯板2023、第一导热板2024和第二导热板2025;第一连接杆202上固接有两个第二连接杆2022;两个第二连接杆2022之间焊接有一个折弯板2023,并且折弯板2023位于第一连接杆202右方;折弯板2023左侧上部焊接有第一导热板2024;第一导热板2024后部贯穿于舱体2内侧;第一导热板2024后部焊接有若干个第二导热板2025。
23.驱动单元包括有电机2026、柱齿轮2027和直齿轮2028;舱体2内侧底部螺栓连接有电机2026,并且电机2026位于伸缩气缸2012右方;电机2026输出轴固接有柱齿轮2027;花键轴2014后侧固接有直齿轮2028;直齿轮2028与柱齿轮2027相啮合。
24.调节组件还包括有导流块2029和导流环2030;第四联动块2033右侧焊接有导流块2029;第一圆盘2011外侧焊接有导流环2030。
25.准备工作时,将顶板1固定连接在船体底部,并且顶板1右方为船体行驶方向,当水平传感器208检测到联动板205出现竖向摇摆时,启动电机2026,电机2026带动柱齿轮2027
转动,柱齿轮2027带动直齿轮2028转动,直齿轮2028带动花键轴2014转动,花键轴2014带动支撑环2016转动,支撑环2016带动套筒2015转动,花键轴2014带动第一圆盘2011转动,第一圆盘2011带动第一圆杆2010进行圆周运动,第一圆杆2010带动第二联动块209运动,第二联动块209带动联动板205左端运动,联动板205带动第一联动块204运动,从而使联动板205绕着万向球203向上或者向下摆动,从而对联动板205的竖向位置进行实时调整,与此同时,水平传感器208检测到联动板205出现横向偏移时,启动伸缩气缸2012,伸缩气缸2012带动第三联动块2013运动,第三联动块2013带动花键轴2014朝向偏摆方向相反的方向运动,花键轴2014在两个支撑环2016内侧进行前后方向的滑动,花键轴2014带动第一圆盘2011运动,第一圆盘2011带动第一圆杆2010运动,第一圆杆2010带动第四联动块2033,第四联动块2033带动转轴短杆2032,转轴短杆2032再带动滑动块2031,接着通过滑动块2031带动第二联动块209运动,第二联动块209带动联动板205左端运动,从而使联动板205绕着万向球203向前或向后摆动,从而对联动板205的横向位置进行实时调整,联动板205带动其上的零件运动,从而对声呐件3的位置进行实时调整,这一过程中,转轴短杆2032与第四联动块2033、转轴短杆2032与滑动块2031之间都会产生相对转动,滑动块2031与第二联动块209之间产生相对滑动,从而适应联动板205偏摆带来的位置、距离的改变,使用时通过同一个花键轴2014对声呐件3的横向位置和竖向位置进行实时调整,使得声呐件3的位置保持稳定,从而大大提高了声呐件3的成像效果,避免了现有设备从单一方向对声呐件3的位置调整后仍出现成像模糊的问题;花键轴2014在支撑环2016内侧滑动过程中,会有部分清水通过花键轴2014与支撑环2016的间隙向舱体2渗透,此时通过设置三个密封环2017同时对渗透的清水进行阻拦,由于花键轴2014与密封环2017为滑动连接,从而使得部分清水渗透至第一空腔91中,花键轴2014转动时,花键轴2014带动支撑环2016转动,支撑环2016带动套筒2015,套筒2015再带动其上的零件转动,从而使第一空腔91中的清水离心运动至第一管道2018中,然后流动至位于第一管道2018外侧的第二管道2019中,套筒2015带动第二管道2019进行圆周运动,由于第二管道2019为倾斜设置,并且第二管道2019后部与花键轴2014中心线的距离大于第二管道2019前部与花键轴2014中心线的距离,从而使清水在第二管道2019中斜向后流动,进而将清水排入至第二圆盘2020内侧的第二空腔92中,之后定期维护时将外置吸水器连通于第三管道2021,然后通过外置吸水器将第二空腔92中的清水吸除,使用时通过三个密封环2017同时对平滑移动的花键轴2014进行密封,将渗入的清水占存在第一空腔91中,避免清水渗透至舱体2中,从而避免舱体2中的电气元件遇水出现短路现象,花键轴2014转动时,占存在第一空腔91中清水离心流入至第二管道2019中,通过第二管道2019的特殊倾斜设置,使得清水在离心流入至第二空腔92中,从而及时将第一空腔91清水排出,进一步提高密封效果;船体行驶过程中,通过导流块2029和导流环2030减小水流对第二联动块209和第一圆盘2011的冲击,通过折弯板2023减小水流对第一连接块201、第一连接杆202、万向球203和第一联动块204的冲击,降低船体行驶阻力,同时避免因水流冲击而导致用于调节声呐件3的活动部件出现松散的现象,从而避免长时间使用后调节精度下降的问题;为了防水,顶板1将伸缩气缸2012和电机2026密封于舱体2中,伸缩气缸2012和电机2026工作过程中会产生大量的热量,此时,热量传导至第一导热板2024上,然后从第一导热板2024传导至第二导热板2025上,再从第二导热板2025传导至折弯板2023上,折弯板2023作为导流件和清水紧密接触,从而使清水对折弯板2023进行降温,而折弯板2023右侧面设置有褶皱,进一
步提高换热效率,从而对实现了对伸缩气缸2012和电机2026进行高效散热。
26.实施例2在实施例1的基础上,如图1-2和图9-10所示,加固组件包括有第二连接块301、第二圆杆302、第五联动块303、弹簧304、固定块305、第六联动块306、限位块307和限位环308;位于左方的第一锁环206上焊接有两个第二连接块301;位于左方的第二锁环207下侧中部焊接有另一个第二连接块301;三个第二连接块301远离声呐件3中心的一侧均焊接有两个第二圆杆302;每相邻两个第二圆杆302之间均滑动连接有一个第五联动块303;六个第二圆杆302上均套设有一个弹簧304,弹簧304的一端与相邻的第二连接块301焊接,弹簧304的另一端与相邻的第五联动块303焊接;三个第五联动块303朝向声呐件3中心的一侧均焊接有一个固定块305;三个第二连接块301内部均滑动连接有一个第六联动块306,每个第六联动块306均与相邻的固定块305配合;固定块305远离相邻的第五联动块303的一侧设置有若干个倒扣,第六联动块306与固定块305相接触面设置有若干个倒扣;三个第六联动块306左端之间固接有一个限位块307;限位块307右侧与声呐件3相接触;声呐件3外侧左部焊接有限位环308,限位环308与位于左方的第一锁环206内侧面相接触,限位环308与位于左方的第二锁环207内侧面相接触。
27.花键轴2014、套筒2015和四个密封环2017之间形成有三个第一空腔91,第一空腔91与相邻的第一管道2018相连通。
28.舱体2、套筒2015和第二圆盘2020之间形成有第二空腔92,若干个第二管道2019均与第二空腔92相连通。
29.折弯板2023呈v形,并且折弯板2023尖角方向朝右,折弯板2023右侧面设置有褶皱。
30.密封环2017为橡胶圈。
31.通过第一锁环206和第二锁环207将声呐件3外侧面固定后,通过限位块307对声呐件3左侧进行限位,避免声呐件3向后滑动,通过位于左方的第一锁环206和第二锁环207同时对限位环308进行限位,避免限位环308向右运动,从而避免声呐件3向右运动,从而避免船体在水面上行驶过程中声呐件3因惯性或者水流阻力出现偏移现象,进而避免影响对声呐件3位置调整的精度;限位环308焊接在声呐件3上可能会出现焊接偏移现象,使限位环308贴合位于左方的第一锁环206和第二锁环207,然后人工推动限位块307向右运动,限位块307带动第六联动块306向右运动,由于第六联动块306和固定块305上的倒钩相啮合,从而使第六联动块306推动固定块305远离声呐件3运动,固定块305带动第五联动块303运动,并对弹簧304进行拉伸,第六联动块306停止运动后,弹簧304回弹带动固定块305运动回原位,对第六联动块306进行固定,从而使限位块307紧密贴合声呐件3左侧,使用时可以根据限位环308的位置对限位块307的位置进行调节,避免因限位环308焊接在声呐件3上出现偏移而导致限位块307无法贴合声呐件3左侧的现象出现。
32.应理解,该实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1