一种水下测绘用精准定位装置及其定位方法与流程
1.本发明属于水下测绘技术领域,特别是涉及一种水下测绘用精准定位装置及其定位方法。
背景技术:
2.水下地形测量包括测点的平面位置和水深测量,平面位置主要采用gnss定位技术确定,水深主要通过各种类型的测深仪得到,由水面高程(水位)减去水深可得测点的水底高程,其他定位方法如断面索法、测量机器人(智能全站仪)极坐标法、无线电定位方法以及人工测深方法。
3.水下测绘的过程中,所投放的水底坐标容易受水下活动或鱼类活动影响发生偏移,导致水下测绘数据准确度发生偏差,且在投放水底坐标时,需要人工逐一下放,测量面较大的情况下,需要勘测人员逐一到达指定位置,较为耗时费力,降低了对水下地形的勘测效率。
4.为此,需要提供一种水下测绘用精准定位装置,通过遥感无人船携带多个水下坐标定位装置,在到达不同位置后,对坐标定位装置进行投放,同时坐标定位装置,在沉入水底后,通过类似船锚结构进行定位。
技术实现要素:
5.本发明的目的是提供一种水下测绘用精准定位装置及其定位方法,通过遥感无人船携带多个水下坐标定位装置,在到达不同位置后,对坐标定位装置进行投放,同时坐标定位装置,在沉入水底后,通过类似船锚结构进行定位,以解决上述技术问题。
6.本发明解决上述技术问题的技术方案如下:一种水下测绘用精准定位装置及其定位方法,包括遥感无人船:所述遥感无人船的底部固定连接有储备箱,所述储备箱的内腔设置有多个沉水外壳,所述沉水外壳的内腔中设置有定位组件,所述定位组件包括固定安装在沉水外壳内腔底部的防水马达一,所述防水马达一的输出轴固定连接有升降螺杆,所述升降螺杆的表面螺纹连接有升降螺套,所述沉水外壳内腔的底部环形设置有三个可滑动的滑动板,所述沉水外壳内腔的底部环形开设有三个与滑动板相适配的矩形滑槽,所述升降螺套的表面环形转动连接有三个拉杆,所述拉杆远离升降螺套的一端与滑动板转动连接,所述滑动板的底部固定连接有锚定件,所述储备箱的内腔设置有投放组件,所述投放组件包括推进组件和拨动组件,所述储备箱的内腔固定连接有中置板,所述沉水外壳的顶部设置有防脱组件,所述沉水外壳顶部的左侧固定安装有勘测仪器一,所述沉水外壳顶部的右侧固定安装有勘测仪器二。
7.优选的,所述推进组件包括固定安装在中置板顶部左侧的防水马达二,所述防水马达二的输出轴贯穿至储备箱的左侧并固定连接有驱动齿轮,所述中置板的顶部设置有与储备箱转动连接的推进螺杆,所述推进螺杆的左端贯穿至储备箱的左侧并固定连接有从动齿轮,所述推进螺杆和从动齿轮相啮合。
8.优选的,所述中置板的顶部滑动连接有位移滑架,所述储备箱内腔前侧和后侧的顶部均开设有与位移滑架相适配的导向滑槽。
9.优选的,所述滑动板的两个窄面均固定连接有防脱卡套,所述防脱卡套与矩形滑槽的内壁滑动连接。
10.优选的,所述拨动组件包括固定连接在位移滑架底部前侧和后侧的单向固定座,所述单向固定座的内腔设置有可转动的斜面拨块,所述中置板顶部的前侧和后侧均开设有与斜面拨块相适配的预留滑槽,所述斜面拨块前侧和后侧的顶部均固定连接有转动柱。
11.优选的,所述斜面拨块通过转动柱与单向固定座转动连接,所述转动柱的表面套设有扭簧,所述扭簧的一端与斜面拨块扣合,所述扭簧的另一端与单向固定座扣合。
12.优选的,所述防脱组件包括固定连接在沉水外壳顶部的吊臂,所述中置板的顶部开设有与吊臂相适配的弧形滑槽,所述吊臂滑动连接在中置板的顶部。
13.优选的,所述吊臂底部的前侧和后侧均嵌入设置有磁块,所述中置板的顶部嵌入设置有两个与磁块相吸合的铁片。
14.优选的,所述沉水外壳内腔的底部环形设置有三个配重块,所述配重块的表面套设有两个定位箍,所述定位箍远离配重块的两端均通过攻丝与沉水外壳的内壁固定连接。
15.一种水下测绘用精准定位装置,其定位方法如下:
16.一、使用者在使用的过程中,通过遥感地面站控制遥感无人船的航线及位置,在遥感无人船向地面站发送指定的位置信息后,遥感无人船停止航行;
17.二、开启防水马达二,防水马达二通过驱动齿轮带动从动齿轮发生转动,使得推进螺杆在中置板的顶部发生旋转,在推进螺杆发生转动的过程中,推进螺杆通过其表面螺纹带动位移滑架先向左侧滑动,位移滑架带动斜面拨块在预留滑槽的内腔中向左滑动,斜面拨块受吊臂的阻挡发生折叠,在位移滑架自右侧首个位移滑架顶部位移后,扭簧带动斜面拨块发生旋转,使得斜面拨块得以复位,随后防水马达二反向转动,通过驱动齿轮和从动齿轮带动推进螺杆反向转动,使得位移滑架向右侧滑动,位移滑架带动斜面拨块向右侧对吊臂进行推动,使得吊臂脱离中置板的顶部,最终使得右侧首个沉水外壳自储备箱内腔底部的右侧滑落,以此类推,在遥感无人船航行至指定位置,通过上述方法对沉水外壳进行定点下放;
18.三、自储备箱内腔下放的沉水外壳受其内腔中配重块的作用快速沉入水底,待沉水外壳沉入水底后,防水马达一启动,带动升降螺杆发生旋转,在升降螺杆转动的过程中其通过表面螺纹对升降螺套向上推进,升降螺套在向上位移的过程中对三根拉杆进行拉动,继而使得三个滑动板带动三个锚定件相向运动,受锚定件形状影响,锚定件插入水底土内,对沉水外壳进行定位,防止沉水外壳受水浪或鱼类作用发生位移;
19.四、最终位于水底的勘测仪器一和勘测仪器二,对水底所需勘测数据进行捕捉,并将数据传输会地面站即可。
20.本发明的有益效果是:本发明通过遥感无人船和投放组件的配合使用,将沉水外壳带动至指定位置进行投放,并通过定位组件的设置,对沉水外壳位于水底位置进行定位,最终通过勘测仪器一和勘测仪器二的配合使用,对水底所需数据进行勘测,解决了水下测绘的过程中,所投放的水底坐标容易受水下活动或鱼类活动影响发生偏移,导致水下测绘数据准确度发生偏差,且在投放水底坐标时,需要人工逐一下放,测量面较大的情况下,需
要勘测人员逐一到达指定位置,较为耗时费力,降低了对水下地形的勘测效率的问题。
附图说明
21.通过结合以下附图所作的详细描述,本发明的上述和/或其他方面的优点将变得更清楚和更容易理解,这些附图只是示意性的,并不限制本发明,其中:
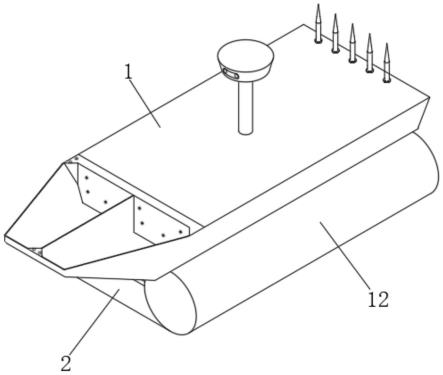
22.图1为本发明一种实施例的立体示意图;
23.图2为本发明一种实施例储备箱的仰视示意图;
24.图3为本发明一种实施例储备箱和投放组件的立体示意图;
25.图4为本发明一种实施例储备箱和推进组件的立体剖视图;
26.图5为本发明一种实施例拨动组件的立体示意图;
27.图6为本发明一种实施例沉水外壳和防脱组件的立体示意图;
28.图7为本发明一种实施例沉水外壳和定位组件的立体示意图;
29.图8为本发明一种实施例定位组件的立体爆炸图。
30.附图中,各标号所代表的部件列表如下:
31.1、遥感无人船,2、储备箱,3、沉水外壳,4、定位组件,401、防水马达一,402、升降螺杆,403、升降螺套,404、滑动板,405、矩形滑槽,406、拉杆,407、锚定件,408、防脱卡套,5、投放组件,51、推进组件,510、防水马达二,511、驱动齿轮,512、推进螺杆,513、从动齿轮,514、位移滑架,515、导向滑槽,52、拨动组件,520、单向固定座,521、斜面拨块,522、预留滑槽,523、转动柱,524、扭簧,6、防脱组件,61、吊臂,62、弧形滑槽,63、磁块,64、铁片,7、中置板,8、配重块,9、定位箍,10、勘测仪器一,11、勘测仪器二。
具体实施方式
32.在下文中,将参照附图描述本发明的水下测绘用精准定位装置及其定位方法的实施例。
33.在此记载的实施例为本发明的特定的具体实施方式,用于说明本发明的构思,均是解释性和示例性的,不应解释为对本发明实施方式及本发明范围的限制。除在此记载的实施例外,本领域技术人员还能够基于本技术权利要求书和说明书所公开的内容采用显而易见的其它技术方案,这些技术方案包括采用对在此记载的实施例的做出任何显而易见的替换和修改的技术方案。
34.本说明书的附图为示意图,辅助说明本发明的构思,示意性地表示各部分的形状及其相互关系。请注意,为了便于清楚地表现出本发明实施例的各部件的结构,各附图之间并未按照相同的比例绘制。相同的参考标记用于表示相同的部分。
35.实施例一
36.图1-8示出本发明一种实施例的一种水下测绘用精准定位装置及其定位方法,包括遥感无人船1:遥感无人船1的底部固定连接有储备箱2,储备箱2的内腔设置有多个沉水外壳3,沉水外壳3内腔的底部环形设置有三个配重块8,配重块8的表面套设有两个定位箍9,定位箍9远离配重块8的两端均通过攻丝与沉水外壳3的内壁固定连接,沉水外壳3的内腔中设置有定位组件4,定位组件4包括固定安装在沉水外壳3内腔底部的防水马达一401,防水马达一401的输出轴固定连接有升降螺杆402,升降螺杆402的表面螺纹连接有升降螺套
403,沉水外壳3内腔的底部环形设置有三个可滑动的滑动板404,滑动板404的两个窄面均固定连接有防脱卡套408,防脱卡套408与矩形滑槽405的内壁滑动连接,沉水外壳3内腔的底部环形开设有三个与滑动板404相适配的矩形滑槽405,升降螺套403的表面环形转动连接有三个拉杆406,拉杆406远离升降螺套403的一端与滑动板404转动连接,滑动板404的底部固定连接有锚定件407,储备箱2的内腔设置有投放组件5,投放组件5包括推进组件51和拨动组件52,储备箱2的内腔固定连接有中置板7,沉水外壳3的顶部设置有防脱组件6,沉水外壳3顶部的左侧固定安装有勘测仪器一10,沉水外壳3顶部的右侧固定安装有勘测仪器二11。
37.实施例二
38.参照图2-5,一种水下测绘用精准定位装置,与实施例一基本相同,更进一步的是:推进组件51包括固定安装在中置板7顶部左侧的防水马达二510,防水马达二510的输出轴贯穿至储备箱2的左侧并固定连接有驱动齿轮511,中置板7的顶部设置有与储备箱2转动连接的推进螺杆512,推进螺杆512的左端贯穿至储备箱2的左侧并固定连接有从动齿轮513,推进螺杆512和从动齿轮513相啮合,中置板7的顶部滑动连接有位移滑架514,储备箱2内腔前侧和后侧的顶部均开设有与位移滑架514相适配的导向滑槽515,通过推进组件51的设置,其中防水马达二510、驱动齿轮511和从动齿轮513的配合使用下,对推进螺杆512起到了驱动旋转的作用,继而使得位移滑架514在推进螺杆512表面螺纹的驱动作用下,可带动斜面拨块521在预留滑槽522的内腔中发生左右滑动,使得吊臂61得以逐个拨动。
39.实施例三
40.参照图2-5,一种水下测绘用精准定位装置,与实施例一基本相同,更进一步的是:拨动组件52包括固定连接在位移滑架514底部前侧和后侧的单向固定座520,单向固定座520的内腔设置有可转动的斜面拨块521,中置板7顶部的前侧和后侧均开设有与斜面拨块521相适配的预留滑槽522,斜面拨块521前侧和后侧的顶部均固定连接有转动柱523,斜面拨块521通过转动柱523与单向固定座520转动连接,转动柱523的表面套设有扭簧524,扭簧524的一端与斜面拨块521扣合,扭簧524的另一端与单向固定座520扣合,通过拨动组件52的设置,其中单向固定座520和斜面拨块521的配合使用,使得斜面拨块521可向右侧进行拨动,在斜面拨块521向左侧滑动时,斜面拨块521折叠收起,同时在扭簧524和转动柱523的配合使用下,使得斜面拨块521得以逐个拨动吊臂61向右侧滑动,继而使得多个沉水外壳3可在不同位置进行下放定位。
41.实施例四
42.参照图6,一种水下测绘用精准定位装置,与实施例一基本相同,更进一步的是:防脱组件6包括固定连接在沉水外壳3顶部的吊臂61,中置板7的顶部开设有与吊臂61相适配的弧形滑槽62,吊臂61滑动连接在中置板7的顶部,吊臂61底部的前侧和后侧均嵌入设置有磁块63,中置板7的顶部嵌入设置有两个与磁块63相吸合的铁片64,通过防脱组件6的设置,其中吊臂61和弧形滑槽62的配合使用,使得沉水外壳3可在斜面拨块521的拨动下逐个进行下放,同时在磁块63和铁片64的配合使用下,使得位于储备箱2内腔的沉水外壳3更为稳定,避免了沉水外壳3自行自储备箱2内腔和滑出的现象发生。
43.一种水下测绘用精准定位装置,其定位方法如下:
44.一、使用者在使用的过程中,通过遥感地面站控制遥感无人船1的航线及位置,在
遥感无人船1向地面站发送指定的位置信息后,遥感无人船1停止航行;
45.二、开启防水马达二510,防水马达二510通过驱动齿轮511带动从动齿轮513发生转动,使得推进螺杆512在中置板7的顶部发生旋转,在推进螺杆512发生转动的过程中,推进螺杆512通过其表面螺纹带动位移滑架514先向左侧滑动,位移滑架514带动斜面拨块521在预留滑槽522的内腔中向左滑动,斜面拨块521受吊臂61的阻挡发生折叠,在位移滑架514自右侧首个位移滑架514顶部位移后,扭簧524带动斜面拨块521发生旋转,使得斜面拨块521得以复位,随后防水马达二510反向转动,通过驱动齿轮511和从动齿轮513带动推进螺杆512反向转动,使得位移滑架514向右侧滑动,位移滑架514带动斜面拨块521向右侧对吊臂61进行推动,使得吊臂61脱离中置板7的顶部,最终使得右侧首个沉水外壳3自储备箱2内腔底部的右侧滑落,以此类推,在遥感无人船1航行至指定位置,通过上述方法对沉水外壳3进行定点下放;
46.三、自储备箱2内腔下放的沉水外壳3受其内腔中配重块8的作用快速沉入水底,待沉水外壳3沉入水底后,防水马达一401启动,带动升降螺杆402发生旋转,在升降螺杆402转动的过程中其通过表面螺纹对升降螺套403向上推进,升降螺套403在向上位移的过程中对三根拉杆406进行拉动,继而使得三个滑动板404带动三个锚定件407相向运动,受锚定件407形状影响,锚定件407插入水底土内,对沉水外壳3进行定位,防止沉水外壳3受水浪或鱼类作用发生位移;
47.四、最终位于水底的勘测仪器一10和勘测仪器二11,对水底所需勘测数据进行捕捉,并将数据传输会地面站即可。
48.综上所述:该水下测绘用精准定位装置及其定位方法,通过遥感无人船1和投放组件5的配合使用,将沉水外壳3带动至指定位置进行投放,并通过定位组件4的设置,对沉水外壳3位于水底位置进行定位,最终通过勘测仪器一10和勘测仪器二11的配合使用,对水底所需数据进行勘测,解决了水下测绘的过程中,所投放的水底坐标容易受水下活动或鱼类活动影响发生偏移,导致水下测绘数据准确度发生偏差,且在投放水底坐标时,需要人工逐一下放,测量面较大的情况下,需要勘测人员逐一到达指定位置,较为耗时费力,降低了对水下地形的勘测效率的问题。
49.上述披露的各技术特征并不限于已披露的与其它特征的组合,本领域技术人员还可根据发明之目的进行各技术特征之间的其它组合,以实现本发明之目的为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1