一种移动式船舶舱壁自动清洗装置的制作方法
1.本实用新型涉及船舶维护保养技术,尤其涉及一种移动式船舶舱壁自动清洗装置,属于船舶工程技术领域。
背景技术:
2.目前,通常人工清洗船舶仓壁,不仅耗时长、清洁效率低、工作量大,而且大块污渍还难以去除,货舱舱壁高处以及死角难以清洗彻底,日积月累还会造成顽固残留,通常一次洗舱需要十几天的作业才能达到检验标准。人工洗仓采用高压皮龙枪进行喷射洗舱时,需要船员手持皮龙枪,由于喷出的水压力和水温都较高,很容易造成人员受伤,尤其是当船员在进行高空作业时,过大的水压极易造成人员坠落,而且需要消耗大量水资源,造成不必要浪费。
技术实现要素:
3.本实用新型的目的在于针对上述人工清洗船舶舱壁时存在的清洗不彻底、安全隐患大、消耗大量水资源的问题,通过人工远程操控本实用新型,以实现自动清洗船舶仓壁的效果。
4.为实现上述目的,本实用新型采用的技术方案是:
5.一种移动式船舶舱壁自动清洗装置,包括:机体、移动机构、驱动机构、清理机构、吸附机构、能源机构及控制机构;用于带动所述机体移动的所述移动机构位于所述机体的两侧;用来驱动所述移动机构运动的所述驱动机构与所述移动机构动力连接;所述清理机构设置于所述机体的底板上,与所述机体固定连接;所述吸附机构设置于所述机体的底板上,所述机体通过所述吸附机构吸附于舱壁上,且将所述清理机构压紧于舱壁;用来供电的所述能源机构设置于所述机体的内部;所述控制机构设置于所述机体内部,所述控制机构通过接收远程控制信号,控制所述驱动机构驱动所述移动机构运动,控制所述清理机构清理舱壁。
6.进一步地,所述移动机构,包括:行走履带;所述行走履带上等距设有若干具有磁性的辊子组件。
7.进一步地,所述驱动机构,包括:分别驱动所述行走履带的两个驱动电机、转动电机主动轮、驱动轮、传动链条及支撑从动轮;所述驱动电机通过所述转动电机主动轮带动所述驱动轮转动,所述驱动轮通过所述传动链条将动力传递给所述支撑从动轮以使得所述支撑从动轮与所述驱动轮朝同方向转动,并带动所述辊子组件运动。
8.进一步地,所述清理机构,包括:设置于所述机体的底板外侧的清理刷,以及设置于所述机体的底板内侧的清理刷驱动电机、清理刷驱动齿轮、清理刷主动齿轮、清理刷驱动电机主动齿轮;所述清理刷上设有若干个用于释放清洁剂的清洁剂排放口;所述清洗刷驱动电机主动齿轮、清理刷驱动齿轮、清理刷主动齿轮依次啮合安装;所述清理刷驱动电机带动所述清理刷旋转。
9.进一步地,所述吸附机构是位于所述机体的底板下方的一整块矩形电磁铁。
10.进一步地,所述能源机构是蓄电池。
11.进一步地,所述控制机构,包括:红外线接收传感器和微控制器;通过所述红外线接收传感器接收来自红外遥控器发出的控制指令,并发送给所述微控制器,所述微控制器控制所述驱动电机和清理刷驱动电机工作。
12.本实用新型移动式船舶舱壁自动清洗装置,与现有技术相比较具有以下优点:
13.1)本发明配备电磁吸附装置,能够使得装置稳定吸附于舱壁,以便于清理船舱侧壁和顶壁。
14.2)本发明能够通过遥控装置控制装置在舱壁上自由移动,以便于有选择性的清理需要清理的舱壁。
15.3)本发明配备可自动旋转的清理刷,并可自动释放清洗剂,配合清理刷,增强去除油污等顽固残留的能力,清洗更加彻底。
附图说明
16.图1为移动式船舶舱壁自动清洗装置的外部结构示意图;
17.图2为移动式船舶舱壁自动清洗装置的内部结构示意图;
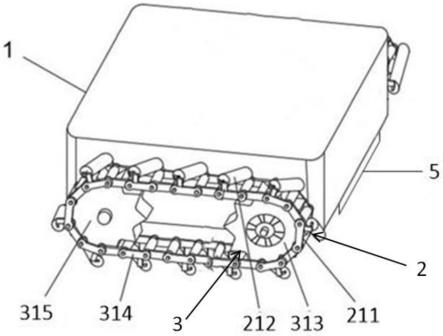
18.图3为移动式船舶舱壁自动清洗装置的底部结构示意图;
19.图4为实施例中的清理机构的结构示意图;
20.图5为实施例中的清洁剂释放机构的结构示意图。
21.上述附图中,1、机体;2、移动机构;3、驱动机构;4、清理机构;5、吸附机构;7、能源机构;8、控制机构;211、行走履带;212、辊子组件;311、驱动电机;312、转动电机主动轮;313、驱动轮;314、传动链条;315、支撑从动轮;411、清理刷;412、清理刷驱动电机;413、清理刷驱动齿轮;414、清理刷主动齿轮;415、清理刷驱动电机主动齿轮;416、清洁剂排放口;811、红外线接收传感器;812、微控制器;611、水泵;612、清洁剂储存罐;613、清洁剂运输管道;614、电磁阀。
具体实施方式
22.以下结合实施例对本实用新型进一步说明:
23.实施例1
24.如图1所示,本实施例公开了一种移动式船舶舱壁自动清洗装置,包括:用于容纳承载各种机构的机体1、用于带动机体在舱壁上移动的移动机构2、驱动机构3、清理机构4、吸附机构5、能源机构7及控制机构8;用于带动机体1移动的移动机构2位于机体1的两侧;用来驱动移动机构2运动的驱动机构3与移动机构2动力连接;清理机构4设置于机体1的底板上,与机体1固定连接;吸附机构5设置于机体1的底板上,机体1通过吸附机构5吸附于舱壁上,且将清理机构4压紧于舱壁;吸附机构5可以是位于所述机体1的底板下方的一整块矩形电磁铁;用来供电的能源机构7设置于机体1的内部,能源机构7可以是蓄电池;控制机构8设置于机体1内部,控制机构8通过接收远程控制信号,控制驱动机构3驱动移动机构2运动,控制清理机构4清理舱壁。
25.实施例2
26.如图1所示,本实施例移动机构2,包括:行走履带211;为了使得机体1在舱壁上按照设定的路径上平稳行进,行走履带211上等距设有若干具有磁性的辊子组件212。
27.实施例3
28.如图2所示,本实施例驱动机构包括:分别驱动行走履带211的两个驱动电机311;驱动电机311通过转动电机主动轮312带动驱动轮313开始转动,驱动轮313通过传动链条314将动力传递给支撑从动轮315,以使得支撑从动轮315与驱动轮313朝着同一方向转动,并带动行走履带211上的辊子组件212运动。
29.实施例4
30.如图1所示,本实施例清理机构包括:清理刷411、清理刷驱动电机412、清理刷驱动齿轮413、清理刷主动齿轮414、清理刷驱动电机主动齿轮415;清理刷411上设有清洁剂排放口416,用于释放清洁剂;清洗刷驱动电机主动齿轮415、清理刷驱动齿轮413、清理刷主动齿414轮依次啮合安装,从而通过清理刷驱动电机412带动清理刷411旋转。
31.实施例5
32.如图1所示,本实施例设有外部的清洁剂释放机构,包括:水泵611、清洁剂储存罐612、清洁剂运输管道613、电磁阀614;通过水泵611将清洁剂储存罐内612的清洁剂泵出,通过清洁剂运输管道613,经由清理刷上的清洁剂排放口416,排放至机体外,配合清理刷411来增强去污能力,电磁阀614控制清洁剂储存罐612和水泵611之间的通断,从而控制清洁剂的排放与否。
33.实施例6
34.如图1所示,本实施例控制机构包括:红外线接收传感器811、微控制器812,以及遥控器组成;可通过红外线接收传感器811接收来自遥控器的控制指令,从而通过微控制器812控制本装置进行清理工作,包括:移动路径、清洁剂的排放以及清理刷411的转动等。
35.综合上述实施例,在具体的应用中,装置的整体配置可按照以下结构实现:
36.整个装置所需的能源均由蓄电池7提供。驱动电机311通过转动电机主动轮312带动驱动轮313开始转动,驱动轮313通过传动链条314将动力传递给支撑从动轮315以使得支撑从动轮315与驱动轮313朝着同一方向转动,并带动行走履带211上的磁性辊子212运动,使得机体在舱壁上按照设定的路径平稳行进。清理刷驱动电机412驱动清理刷驱动电机主动齿轮415转动,带动清理刷驱动齿轮413,从而驱动清理刷主动齿轮414转动,带动清理刷411旋转,同时通过水泵611将清洁剂储存罐内612的清洁剂泵出,通过清洁剂运输管道613,经由清理刷上的清洁剂排放口416,排放至机体外。矩形电磁铁5安装于机体下方,可吸附于舱壁之上,配合移动机构可一边移动一边对所过路径进行清理。此外,可通过红外线接收传感器811接收来自遥控器的控制指令,从而通过微控制器812控制本装置进行清理工作,包括:移动路径、清洁剂的排放以及清理刷411的转动等。
37.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1